-
-
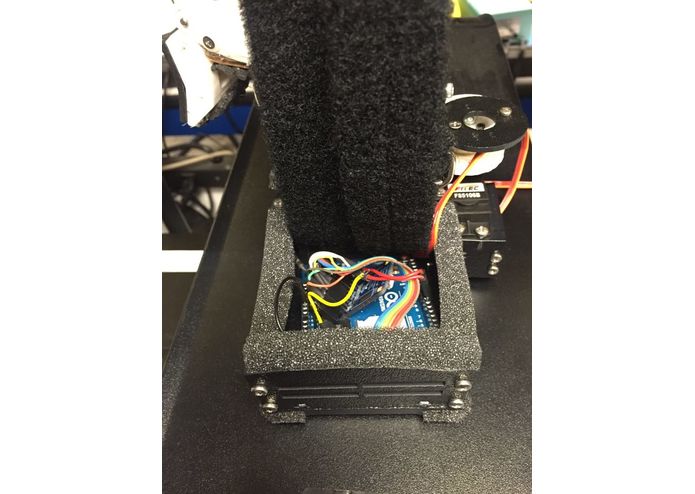
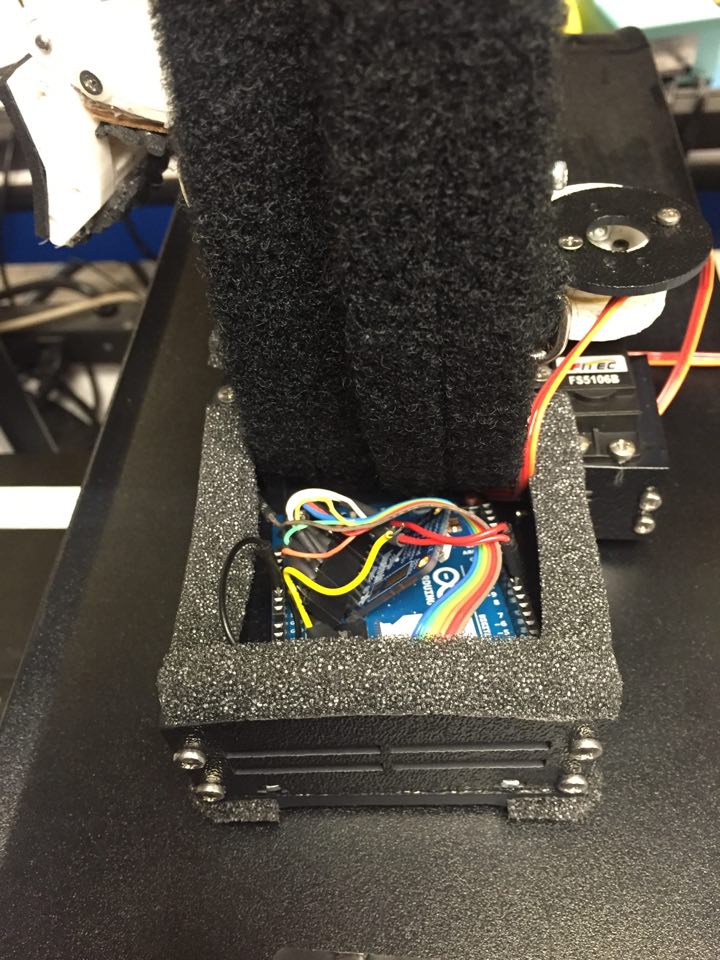
Arduino housing
-

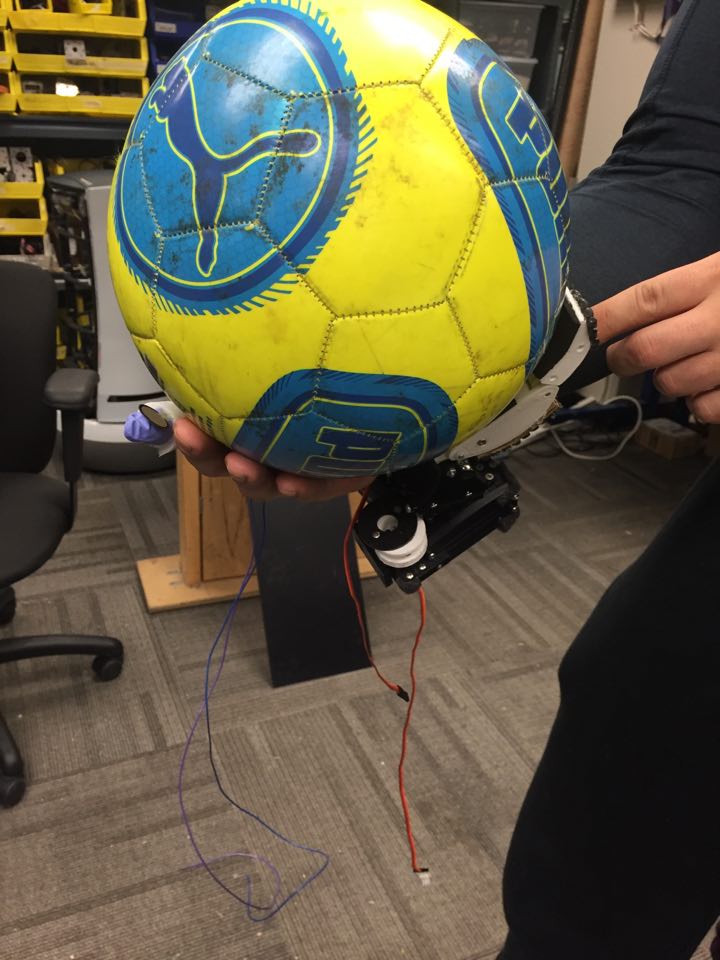
Grasping a ball
-

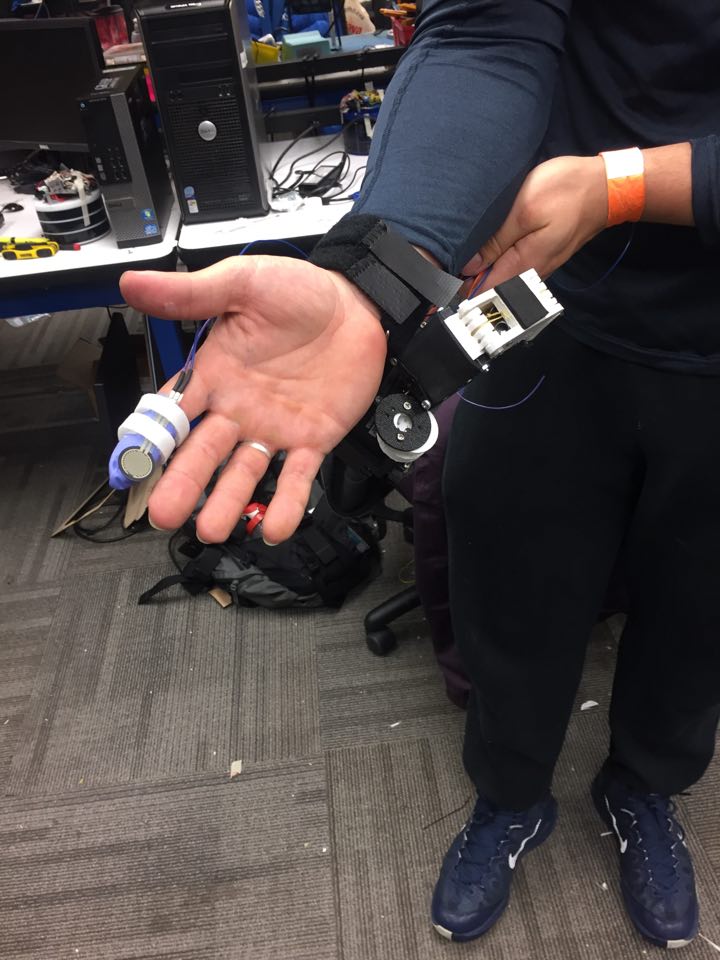
Wearing the device
-
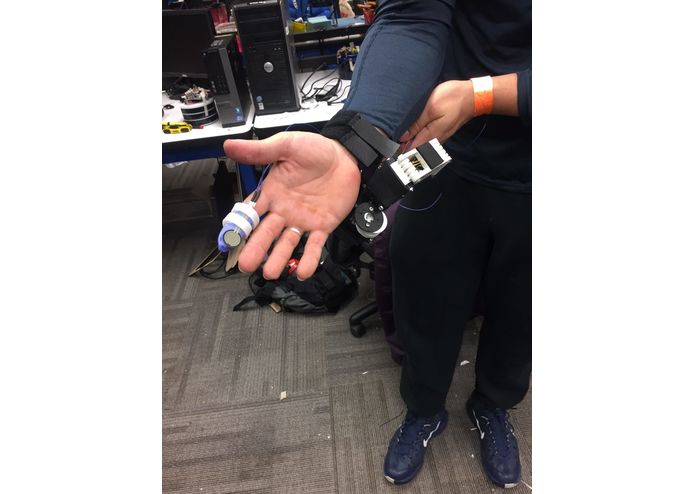
Wearing the device
-

Wearing the device
-

Wearing the device
-

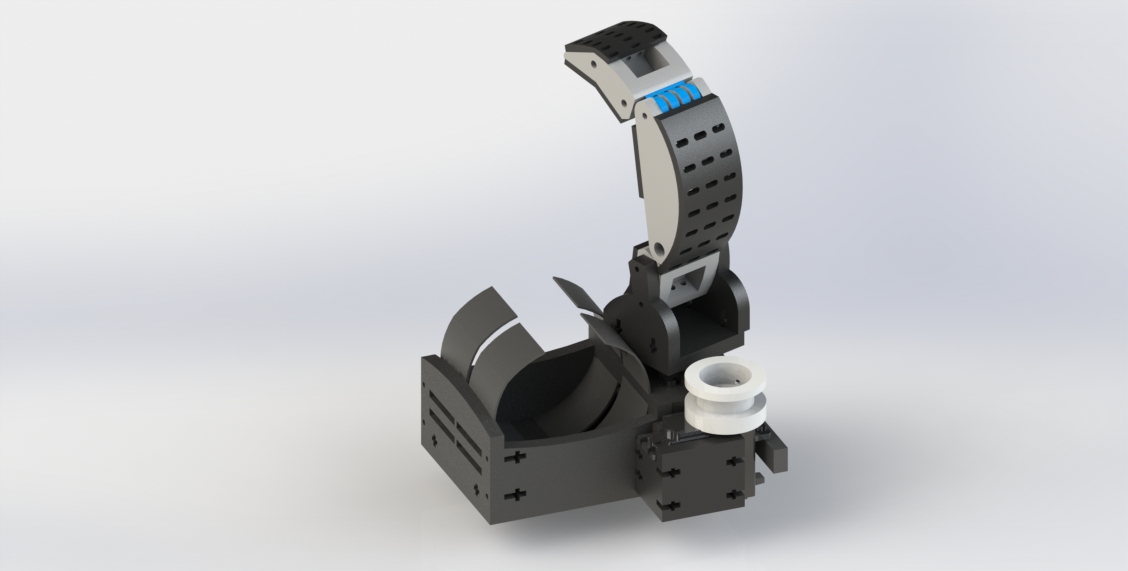
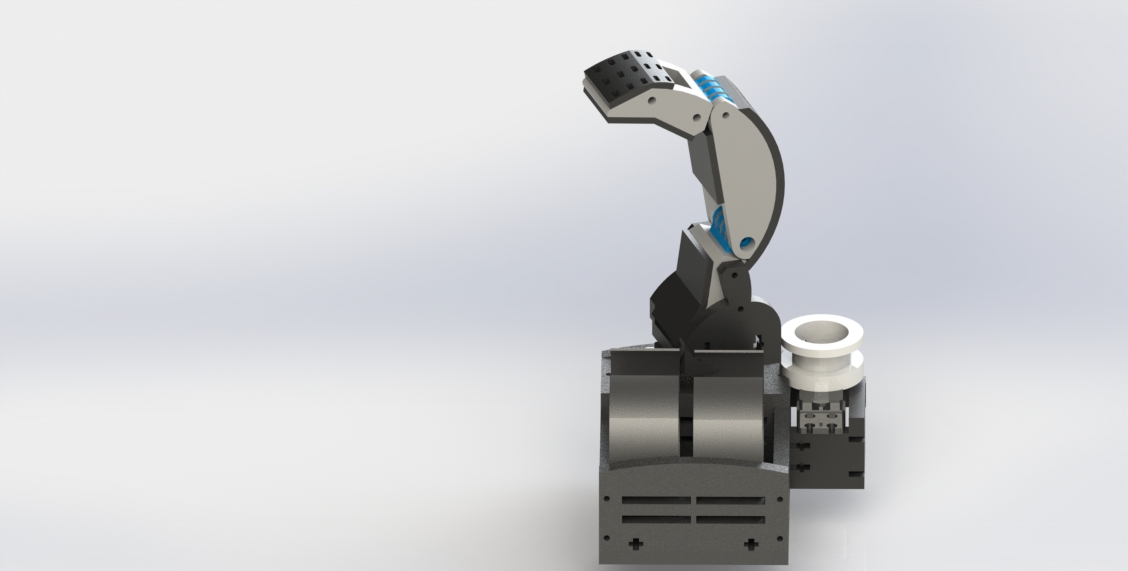
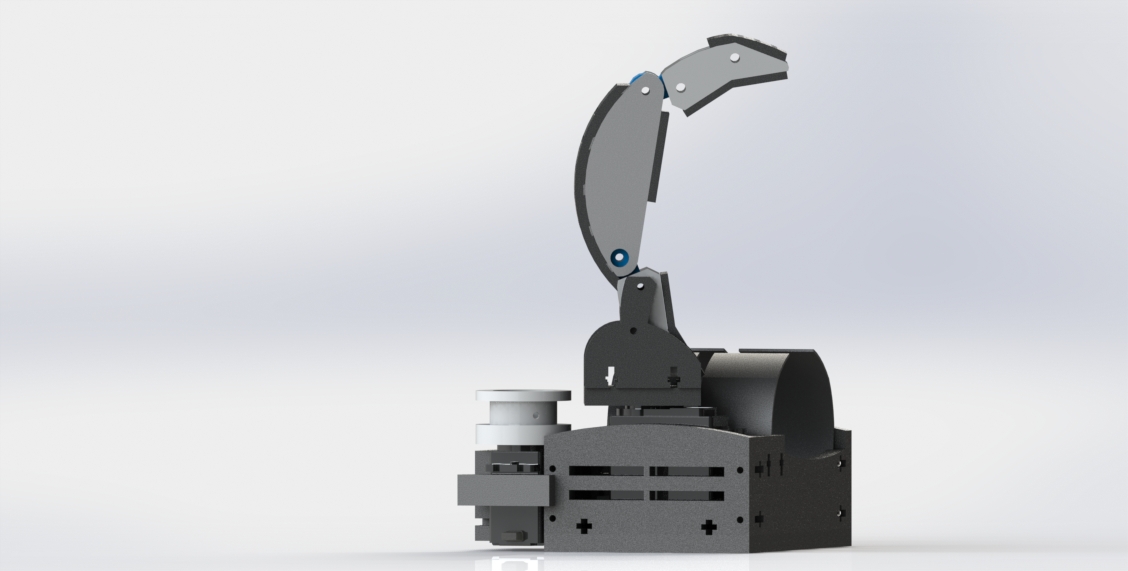
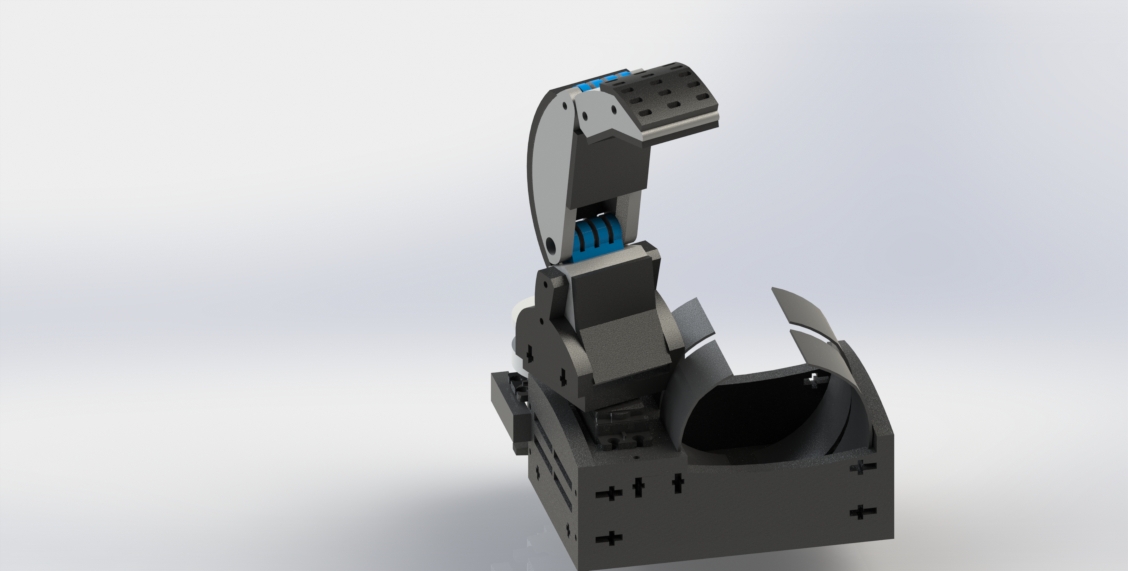
Rendering
-

Rendering
-

Rendering
-

Rendering
-

POLEgar logo




Inspiration :
Make a low cost and effective device, capable of augmenting human dexterity and also be an option for arm prosthetic by combining human and machine capabilities in a wearable device.
What it does
The device has an underactuated robotic finger that can help us grasp using a single arm a variety of different objects, multiple objects and large objects (that would not be possible without the device).
How I built it
Laser cuted parts, 3d printed finger, servos, arduino, force resistive sensor, adafruit bluetooth and an android app.
Challenges I ran into
Combining the Bluetooth and the servos, powering the device and fitting all components in a small box.
Accomplishments that I'm proud of
Make the device serve its purposes of augmenting our capability and dexterity when grasping objects.
What I learned
How important teamwork is.
What's next for POLEgar
Maybe a second version, possibly for an academic paper.

Log in or sign up for Devpost to join the conversation.