-
-

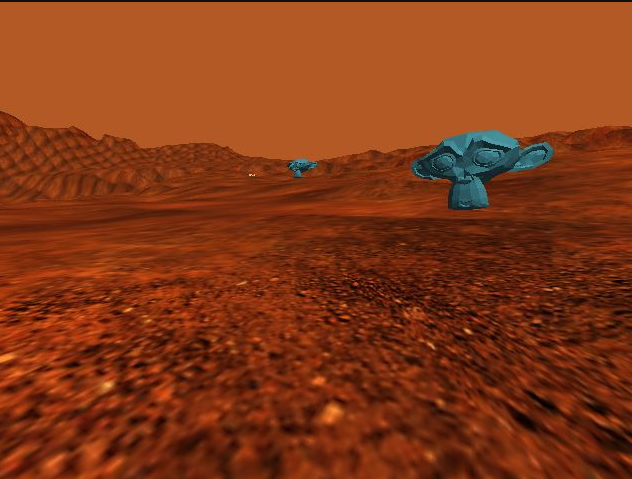
The ARIA Rover in the Jezero Crater Delta
-
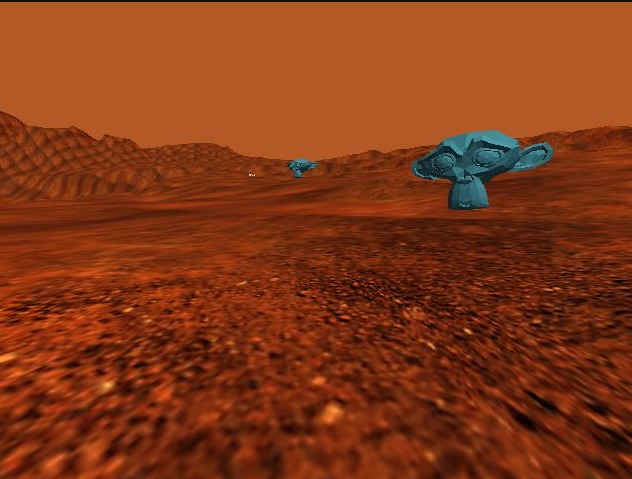
ARIA investigating the first known extraterrestrial life forms
-
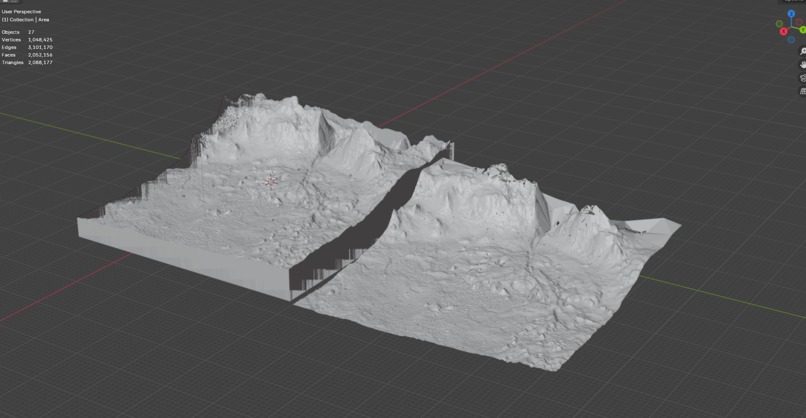
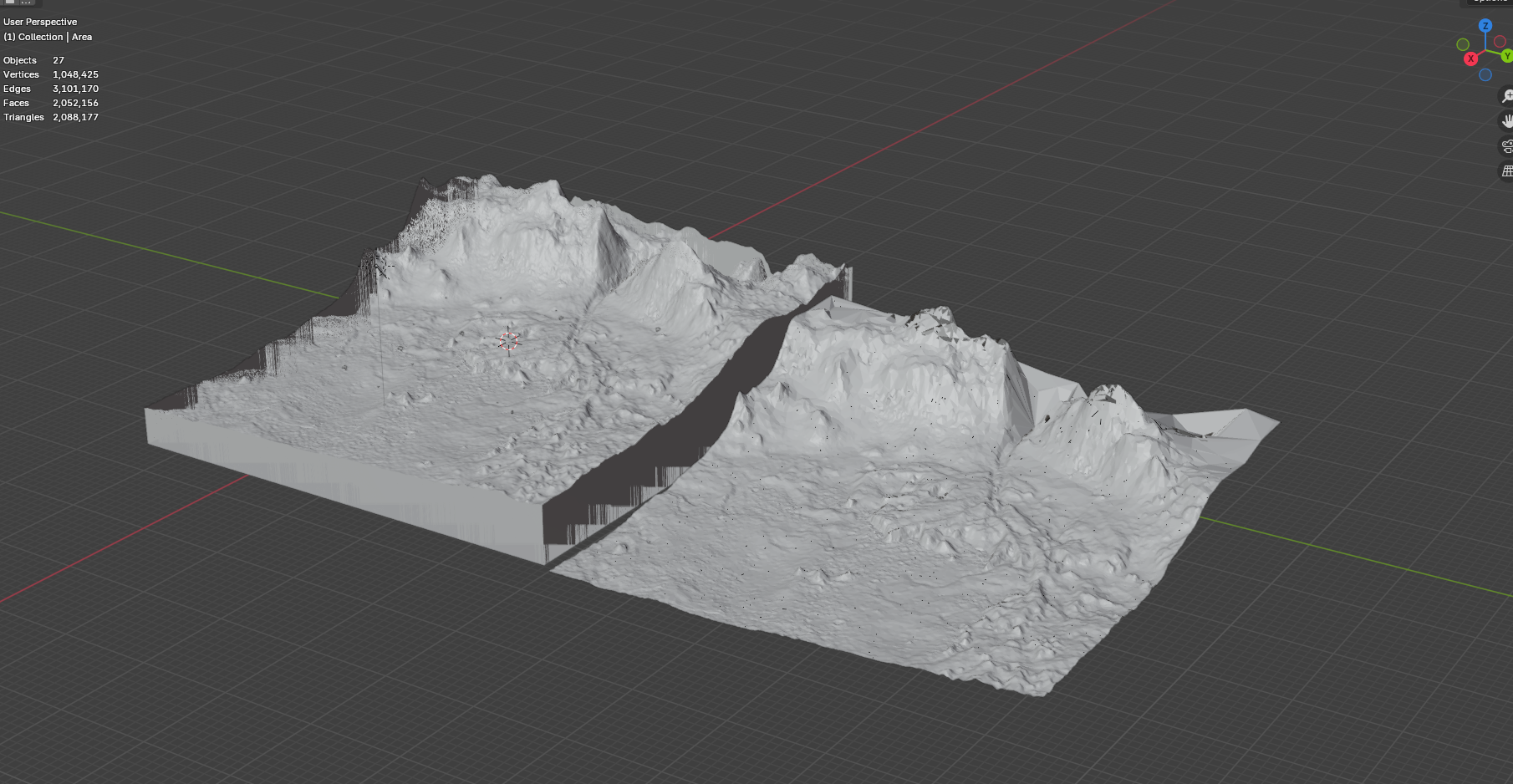
The Jezero Crater Delta model from the Texas Data Repository (left, 2 million polygons) and a reduced model (right, 80 thousand polygons)

Inspiration
We are pushing the boundaries of space exploration with AI. After being inspired by NASA's Perseverance Rover's AI-planned route, we took it a step further by giving AI the ability to perform every step of the research process without the friction of waiting for ground control.
It takes up to 22 minutes to send a message to Mars and another 22 to hear back. The current Perseverance rover cost $2.7 billion and is estimated to remain operational for only one Martian year. With such a limited operational lifespan, it becomes critical to minimize downtime. Current rovers operate on daily uplink schedules and spend enormous amounts of time just waiting. By delegating decision-making tasks to onboard edge-AI, the Autonomous Rover Intelligence Architecture (ARIA) Mars rover reduces operational down-time to near zero, reducing costs while simultaneously increasing discovery.
What It Does
ARIA autonomously explores any extraterrestrial environment it is placed in by planning its route to meet research goals and ensure its own survival. Running on based on the Jezero Crater Delta on Mars, ARIA handles navigation, analysis, and mission decision-making entirely on its own, with no communication with Earth required.
How We Built It
We developed an OpenClaw agent integrated with NemoClaw on an NVIDIA DGX Spark, with separate worker identities for each required function, including a Supervisor that orchestrates the mission and a Navigation Agent for path planning and hazard avoidance. The main reasoning model is Nemotron 30B,, and vision tasks use Nemotron Nano VL.
The simulation runs in Panda3D, built from a real high-resolution surface model of the Jezero Crater delta. It utilizes a full sensor and control API — camera output, locomotion commands, and rover state — that ARIA's tools connect to directly.
Challenges We Ran Into
Getting the agent to interact with images was challenging. Aligning the sandboxed filesystem access, encoding, and vision model context format took significant iteration before it was able to interact with video frames.
We also had to build a full Martian rover simulator from scratch, including decimating a high-resolution Martian surface scan into an optimized mesh the simulator could render in real time, while preserving enough fidelity for the terrain to be scientifically meaningful.
Accomplishments That We're Proud Of
ARIA can't accidentally break itself. Mission constraints are enforced by NemoClaw's OpenShell at the process level, not just in application logic. On a real Mars rover, a software fault means months of downtime waiting for a patch to arrive. We made that failure mode structurally impossible.
We're also proud of the full Martian rover simulation. ARIA isn't operating in a toy environment. The simulation includes terrain scanned by NASA's Perseverance rover, functional camera output, and a clean control API enabling direct agent communication.
What We Learned
We learned a lot about developing complex agents using OpenClaw and NemoClaw, particularly how to structure reasoning and tool-calling across multiple agent identities cleanly. We also got hands-on experience developing for an edge environment like the DGX Spark: ARM64 dependencies, sandboxed inference routing, and working within NemoClaw's security model all had nuance.
What's Next for Point Nemo
Expanding ARIA's research capabilities: integrating power management and RAG-enabled identification methods to enable any activity required for planetary exploration. Further ahead, adding mission-specific laboratory equipment for automatic analysis of Martian samples, closing the loop so the rover can collect, analyze, and decide entirely on its own.
Built With
- blender
- docker
- fastapi
- javascript
- nemoclaw
- nextjs
- opencv
- openrouter
- panda3d
- python
- shell
- typescript
- uvicorn

Log in or sign up for Devpost to join the conversation.