-
in progress...just a sample
-
just a sample
Inspiration ;In Formula 1, you win by milliseconds. But teams still lose precious time manually scanning thousands of photos to find a rival's new winglet or a tiny, race-ending hairline crack.
We were inspired by the MoneyGram Haas F1 Team to build the tool we wish their pit wall had: a system that automates this visual analysis, closing the gap between a track-side photo and a critical engineering decision. We wanted to turn a 2-day analysis task into a 2-second automated alert.
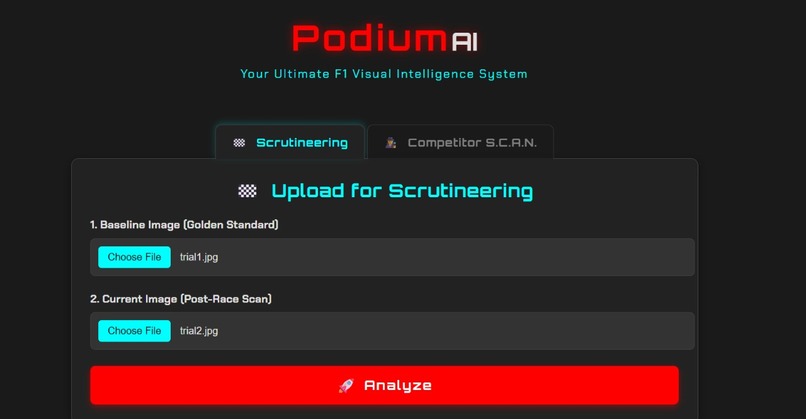
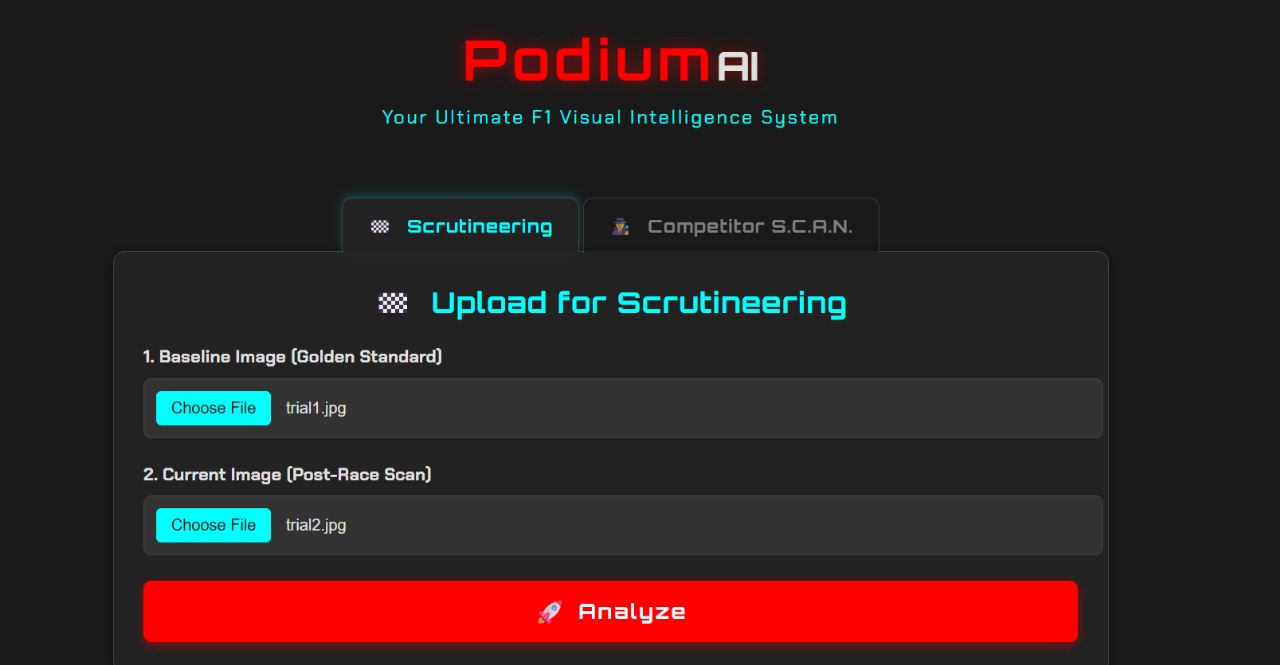
What it does : Podium AI is a full-stack visual intelligence platform with two or more modules (we would add more functions):
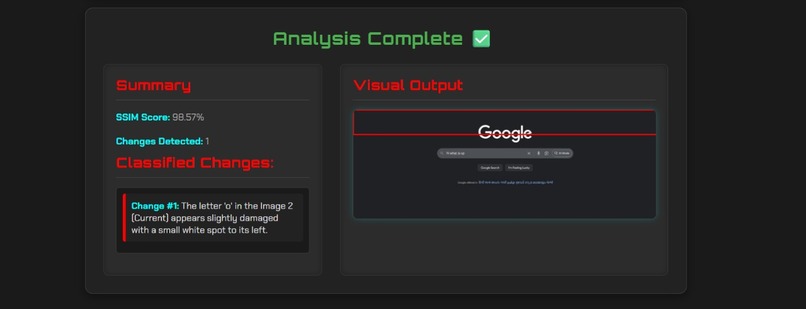
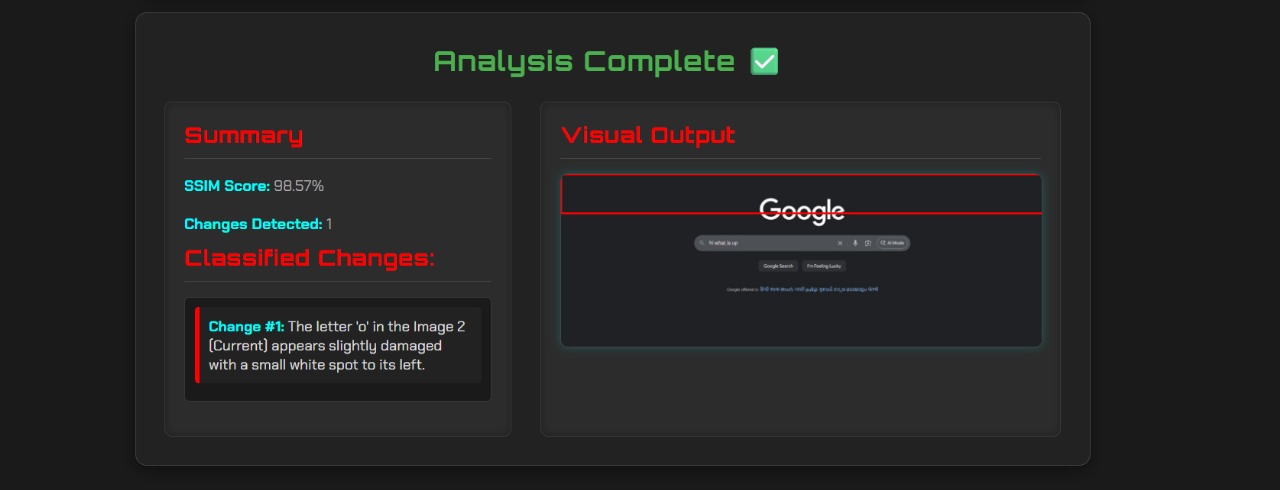
🏁 Scrutineering: The Haas team can upload a "golden standard" image of their car and a "post-race" photo. Our engine instantly finds and classifies any physical damage (cracks, scuffs, tire blistering) to prevent on-track failures.
🕵️ Competitor S.C.A.N.: Engineers can upload a photo of a rival's car from last week and one from today. The engine ignores the 99% that's identical and instantly highlights and classifies the 1% that's new—like a new aero part or wing modification
How we built :We built a Python Flask backend to serve a REST API. The core of our project is a Hybrid Computer Vision Engine built with OpenCV.
It's a "best-of-both-worlds" design:
It first tries a super-fast ORB (feature-based) alignment. This is perfect for the "feature-rich" F1 car images.
If it detects a "feature-poor" image (like a simple screenshot), it automatically falls back to a robust ECC (intensity-based) alignment. This guarantees the demo never fails, no matter what the judges test it with.
Once a change is found (using SSIM from scikit-image), we crop the region and send it to the Groq API (running Llama 4 Scout) for high-speed classification. The frontend is a responsive, F1-themed dashboard built with vanilla HTML, CSS, and JavaScript.t
Challenges we ran into: Our biggest challenge was the API backend. We started with the Gemini API but hit a limit: 0 free-tier quota. We pivoted to the OpenAI API but immediately hit an insufficient_quota error. This was a critical failure point.
This forced us to make a strategic pivot to the Groq API. This turned out to be our best decision. Its incredible speed is not just a fix; it's a core feature for a real-time F1 tool.
Our other challenge was the CV alignment logic. The fast ORB method failed on simple images, and the robust ECC method was too slow. We solved this by building the smart, hybrid engine that automatically picks the right tool for the job
Accomplishments that we're proud ofWe are incredibly proud of the Hybrid CV Engine. It's not just a script; it's a resilient, self-correcting system.
We're also proud of the Dynamic AI Prompting. The backend selects a different "persona" for the AI (a "Haas damage engineer" vs. a "rival aerodynamicist") based on the tab you're on. This makes the tool genuinely smart and context-aware.
Finally, we're proud of building a polished, professional, and functional F1-themed UI/UX in such a short time.
What we learned: Never Rely on One API: A hackathon is not the time to debug free-tier quotas. Being agile and pivoting from Gemini to OpenAI to Groq made our project faster and more resilient.
Speed is a Feature: The "forced" move to Groq taught us that low latency is a critical feature, not just a nice-to-have.
Your Test Data Matters: Our ORB logic was never broken; our "Google homepage" test image was just the wrong kind of data. Using feature-rich F1 images made it work perfectly.
What's next for PodiumAI: F1 Visual Intelligence: V2: Integrate with live pit-lane cameras for real-time analysis as the car rolls in.
V3: Move beyond 2D photos. We will align the camera feed with the team's actual 3D CAD models, allowing for sub-millimeter precision in damage detection.
New Modules: We will add a Tire Analysis module to use time-series images to predict degradation and optimal pit-stop windows.

Log in or sign up for Devpost to join the conversation.