PLUMB
A spatial cortex and a language for physically-grounded, intent-aware 3D worlds.
AI places objects in 3D worlds by vibes, so things float, clip walls, block doors, and topple. PLUMB sits between the agent and the engine and validates every move before it commits. It never just says "no": it returns the exact margin you failed by and the direction to fix it.
Inspiration
LLMs are fluent in language but naive about gravity. Ask one to arrange a room and it floats the statue, clips the chair into the wall, and blocks the door. The fix is not a better prompt, it is a grounding loop: propose, validate against real physics, repair, commit. And the asset itself must know what it is, because a hollow glass vase and a solid bronze statue are identical to a naive geometry pass yet physically nothing alike.
What it does
AI is being handed the job of building 3D worlds: game levels, simulations, virtual spaces. But it has no sense of physical reality, so it produces scenes that break the instant physics runs, and a human has to fix every mistake by hand. There is no real automated workflow.
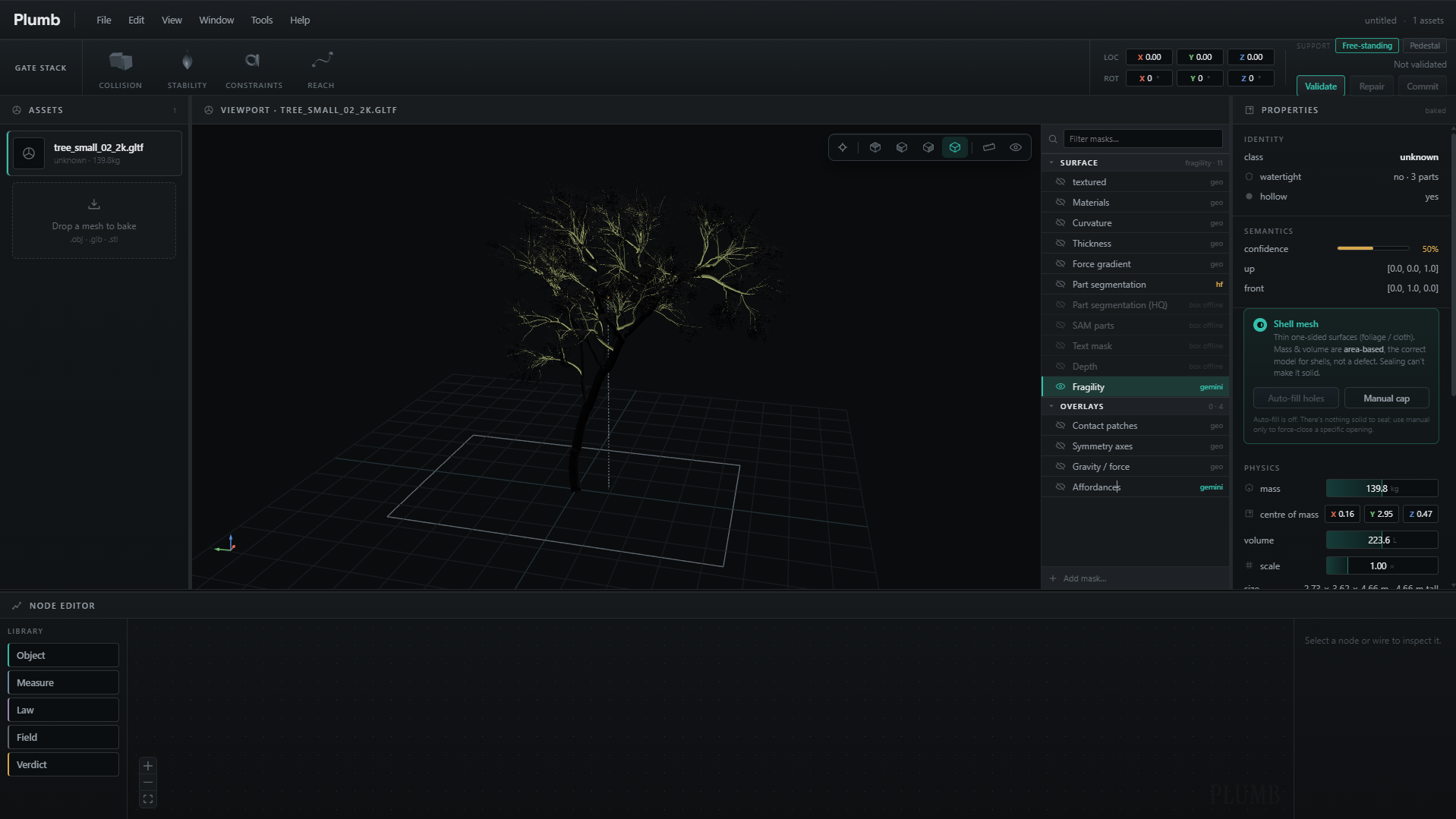
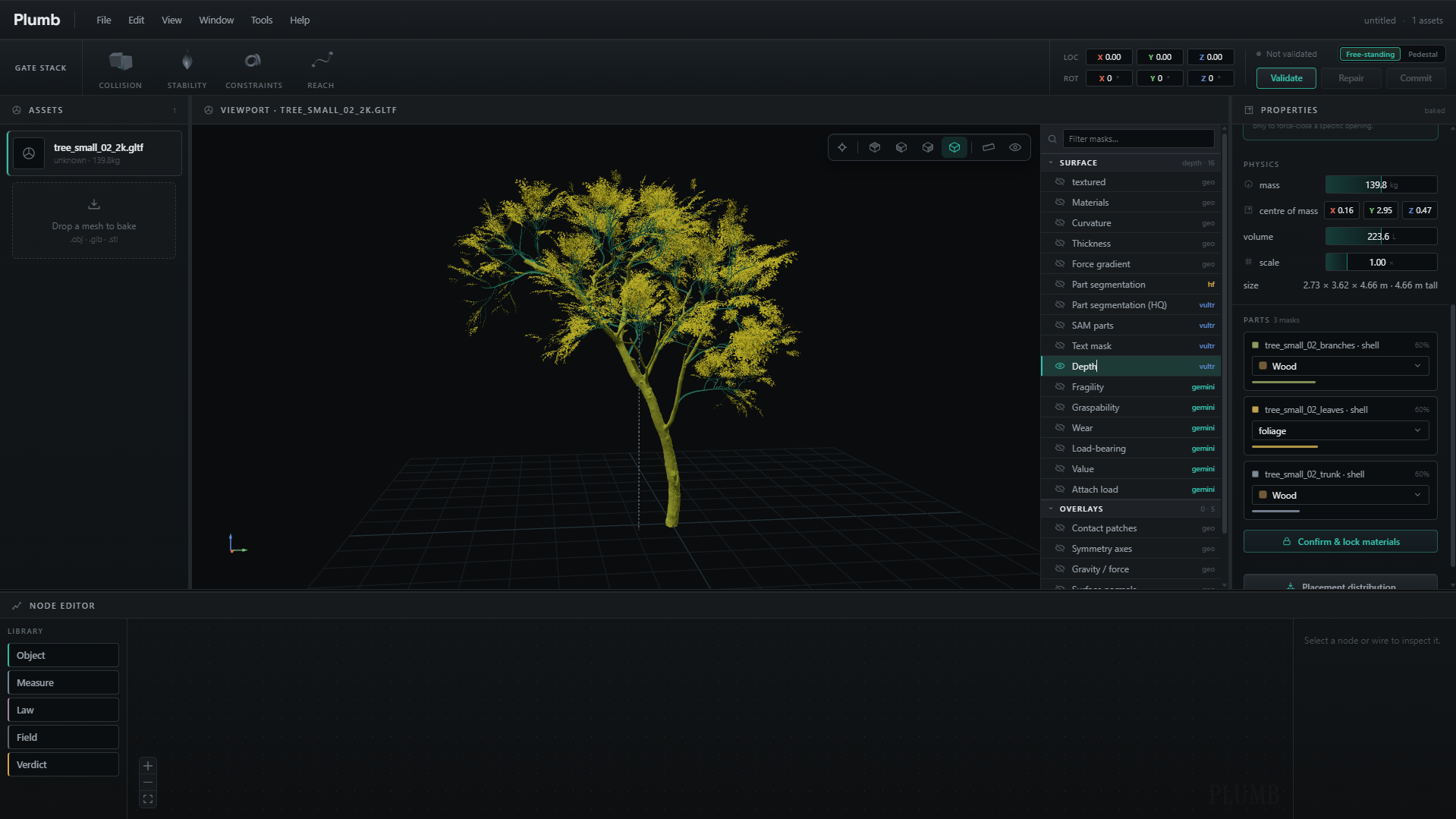
PLUMB is the trust layer that makes it a workflow. It gives every object real physics (a statue knows it is top-heavy, a vase knows it is fragile and hollow), it lets a person set the rules a scene must obey, and it checks every AI decision against real physics before it touches the scene, auto-fixing the ones that fail. Nothing commits until it is proven correct.
Who it is for:
- Game studios and level designers: AI set-dressing that is guaranteed stable, clip-free, and navigable.
- AI and agent developers: spatial validation as one tool call, so an agent asks "is this valid, and how do I fix it" and converges in a step or two instead of burning tokens guessing.
- Simulation and robotics teams: mass-produce physically valid training scenes.
- Architects and accessibility auditors: "is this path wheelchair-wide?", get a pass/fail and an automatic fix.
The output is one portable .wdf file that describes a whole validated world in plain text. glTF
and USD describe geometry; .wdf describes meaning, physics, and intent.
How it works
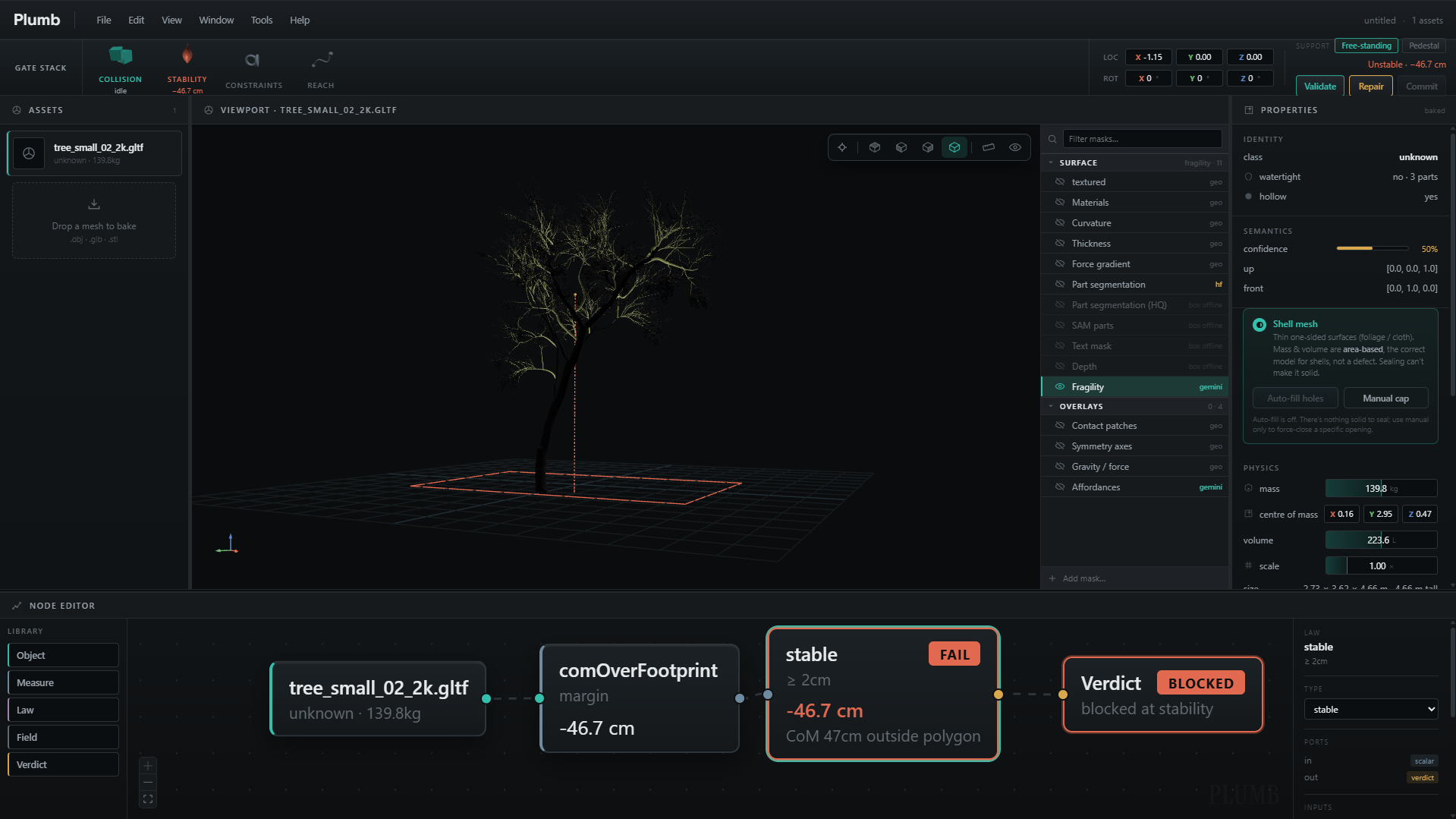
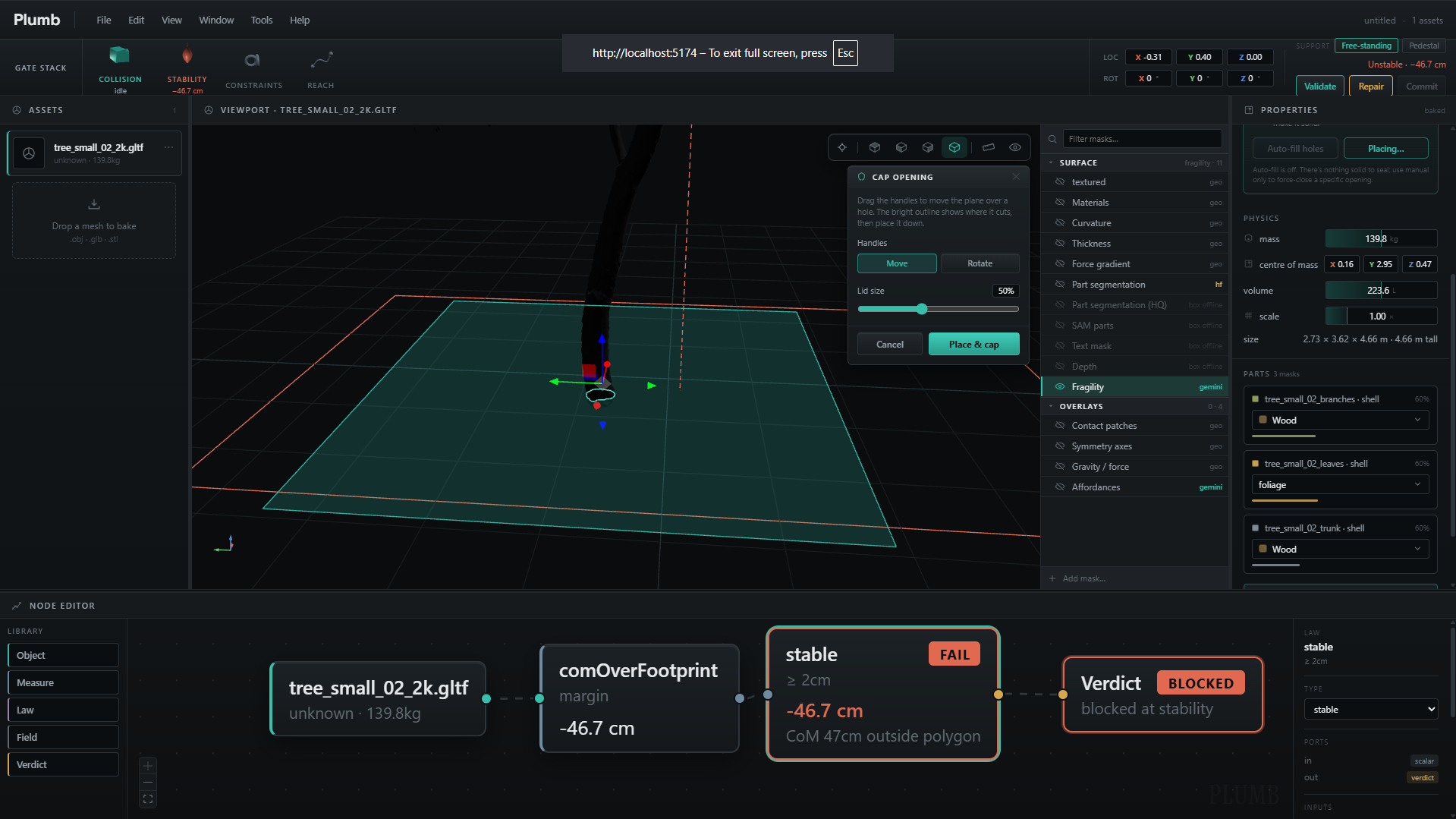
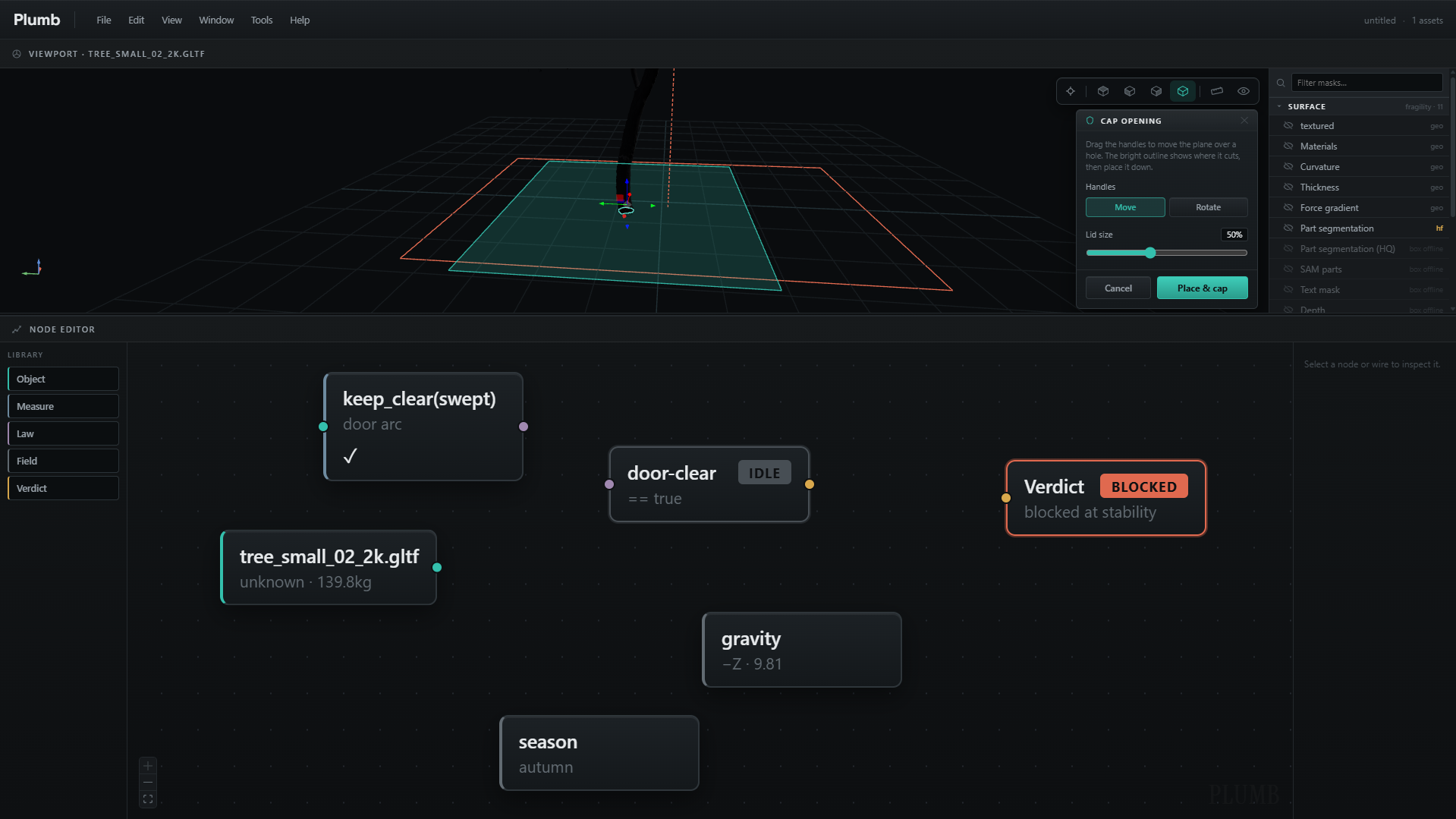
One loop: Bake, Author, Propose, Gate, Repair, Commit. Every asset is baked once into a Physical Asset Profile with real mass, centre of mass, inertia, and material (type-aware, so a door knows its swing arc). A human authors the rules in a node graph. The agent proposes a move; it runs the gates (Collision, Stability, Constraints, Reach) and stops at the first hard fail. The verdict is a number and a fix vector ("Stability minus 7 cm, shift plus 6 cm toward centre"), and repair uses the same maths that rejected the move to fix it. Only validated moves reach the engine.
The unifying idea: every gate is a cost function, so the thing that rejects a placement is the thing that fixes it. That is why PLUMB answers why and how, not just no.
How we built it
Two halves meet at one frozen contract (contracts.py). The cortex is headless Python: trimesh
plus CoACD decompose and density-weight the mesh for mass and CoM, the gates run (Stability as a
CoM-over-support-polygon margin, Collision as convex-part clearance, Reach as floor projection),
repair is scipy SLSQP, and everything is exposed as MCP tools via FastMCP. The studio is the IDE
(React, TypeScript, Vite, Three.js): drop a mesh, a FastAPI backend runs the real bake, and a node
editor lights up green/amber/red from the real verdict. Gemini powers the semantic bake. The
conscience drives the agent loop, visualises in Rerun, round-trips the .wdf language, and bridges
to Unreal Engine. One canonical space throughout: Z-up, right-handed, metres, kilograms.
Challenges we ran into
Drop simulations are flaky, so we gate on a deterministic quasi-static margin instead. Single-mesh mass inference is weak science, so structural outputs are labelled priors and stay human- overridable. Coordinate conversions (handedness, winding, cm to m) silently corrupt physics, so they live behind one adapter with golden round-trip tests. The node editor started cluttered with fifteen node types, so we collapsed it to five abstract ones.
Accomplishments that we're proud of
The bake knows the statue is top-heavy because the bronze is up top, a real composition-aware CoM.
The verdict always gives a number and a fix, never a dead end. The node editor animates from the
real backend verdict. And a whole physically-grounded world fits in one portable .wdf file.
What we learned
A grounding loop beats a better prompt. Validation and repair are the same maths, so build them once. Labelling what you are unsure of and letting a human override it is what earns trust.
What's next for Plumb
More bake archetypes (seasonal trees, auto-filling shelves) and terrain-aware placement on uneven
ground. Adapting PLUMB beyond Unreal to other engines like Unity, Blender, and Omniverse, since the
canonical world model and .wdf are engine-agnostic and only the thin adapter changes. And .wdf
vocabulary packs, so teams import reusable asset and profile libraries like code libraries.
Built With
python · fastapi · uvicorn · trimesh · coacd · scipy · shapely · numpy ·
pydantic · fastmcp (Anthropic MCP) · mujoco · rerun · lark · httpx ·
react · typescript · vite · three.js · react-flow (@xyflow) ·
google-gemini (AI Studio) · unreal-engine-5
Built With
- claude
- figma
- huggingface
- json
- mcp
- ml
- python
- rerun
- rust
- typescript
- unreal-engine



Log in or sign up for Devpost to join the conversation.