Platform for Compound Robotics
Inspiration
Robotics progress is fundamentally limited by compute.
Training even a single humanoid robot to walk requires millions to billions of physics simulation steps and continuous neural network optimization. Scaling that to fleets of robots and multiple task types multiplies the computational requirements dramatically.
Modern GPU-native robotics frameworks like NVIDIA Isaac Sim and Isaac Lab are explicitly designed to run on high-end NVIDIA accelerated compute. These systems depend on CUDA, GPU-accelerated PhysX, and high-throughput deep learning pipelines that cannot operate at meaningful scale on laptops or CPU-based machines.
DGX Spark is not simply a fast GPU. It is an integrated robotics training and AI compute platform combining:
- CUDA and cuDNN accelerated training
- GPU-native physics simulation
- Parallel reinforcement learning infrastructure
- High-memory, high-throughput neural training
The goal of this project was to demonstrate something that would only be possible on DGX Spark:
Training entire fleets of humanoid robots and manipulation systems simultaneously using NVIDIA Isaac Sim and Isaac Lab.
This project explores what robotics looks like when compute is no longer the bottleneck.
What it does
Platform for Compound Robotics is a GPU-accelerated robotics training platform that uses DGX Spark to train multiple classes of robots simultaneously.
The system trains:
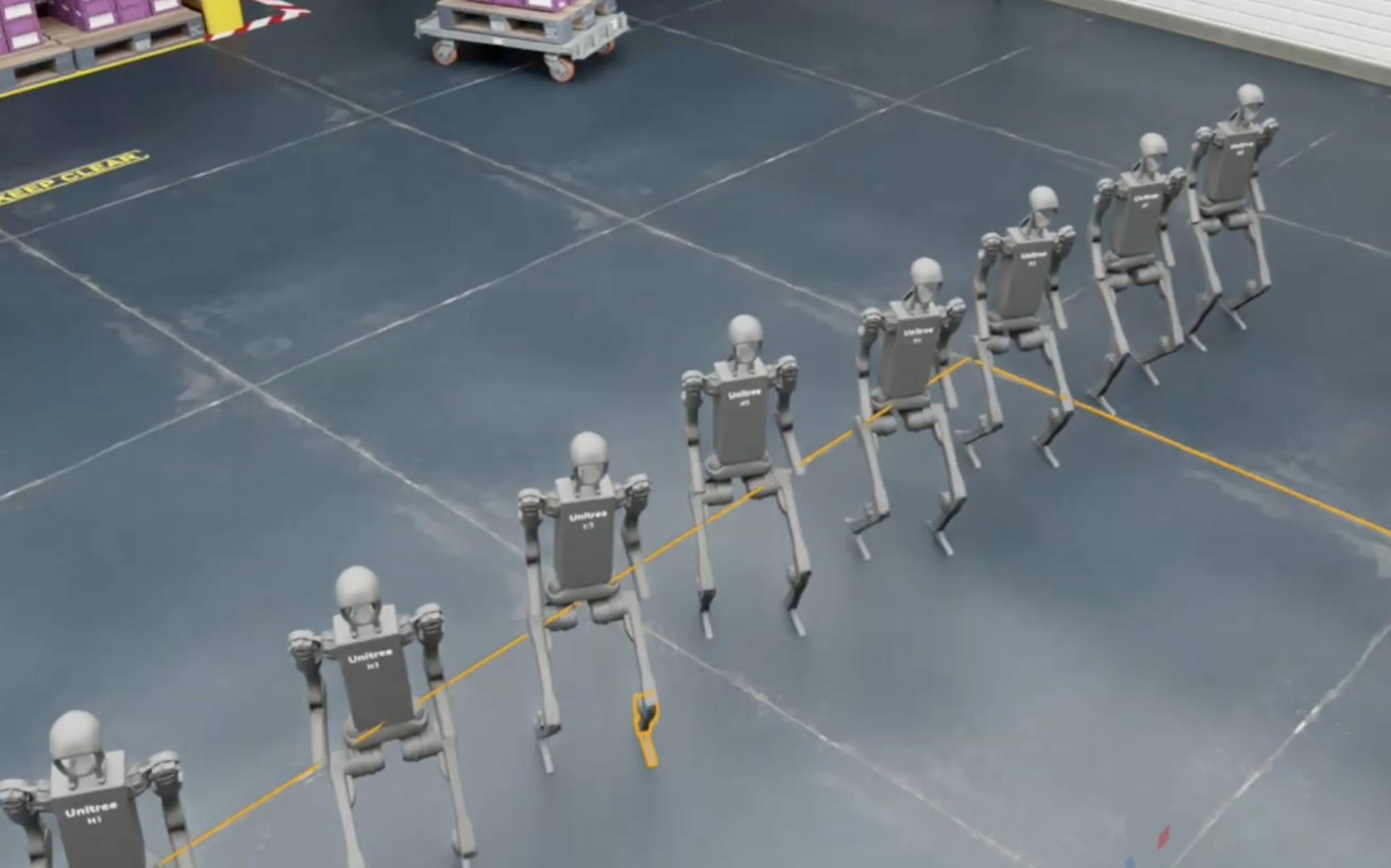
Fleet-scale humanoid locomotion
- Hundreds of humanoid robots learn to walk in parallel
- Each humanoid runs its own GPU-accelerated physics simulation
- Each humanoid trains its own neural network policy
- Robots learn balance, gait, and recovery behaviors
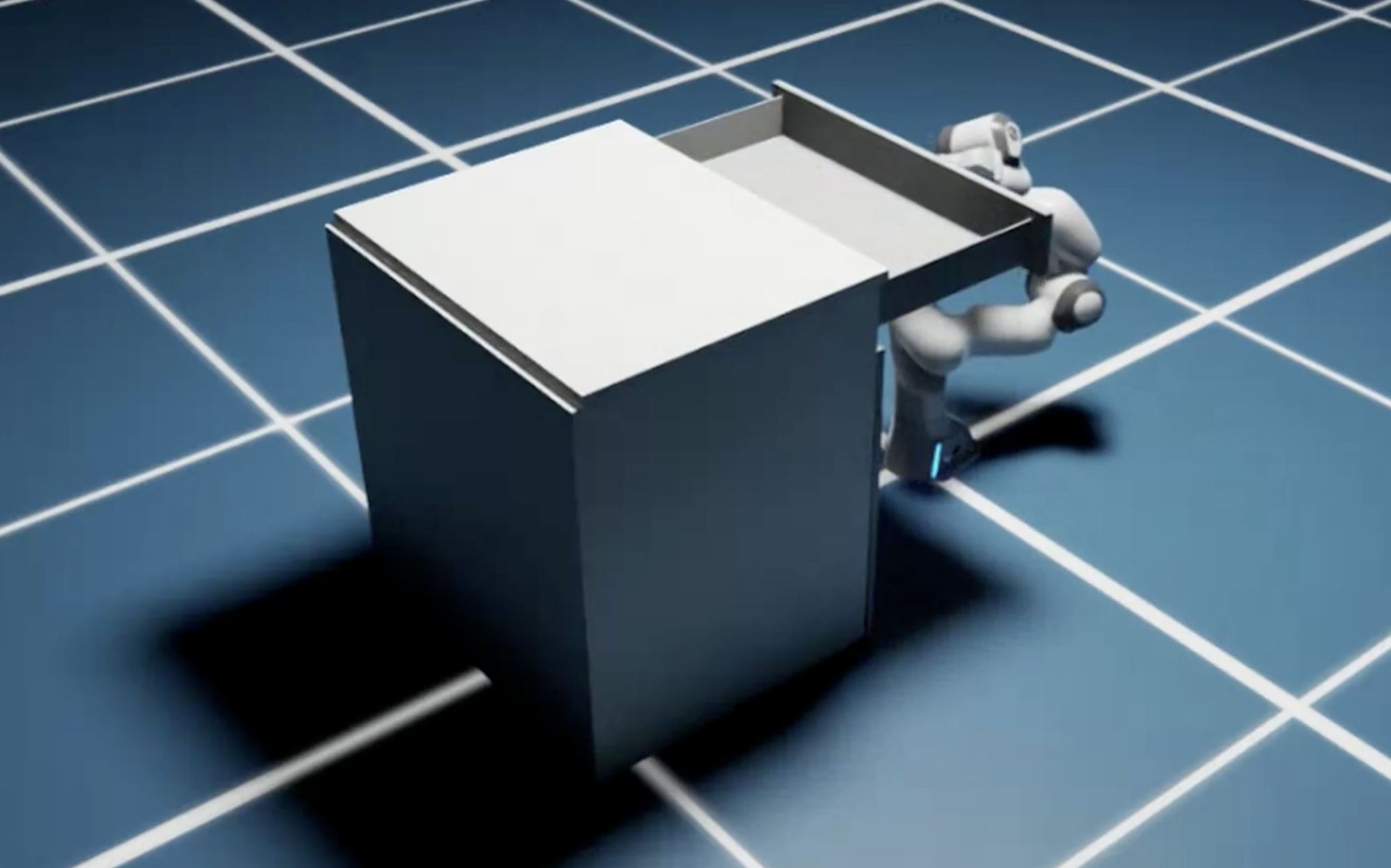
Manipulation with a robotic arm
- A robotic arm learns to open a drawer
- The arm learns reaching, grasping, and pulling
- This requires complex contact-rich physics simulation
These workloads run concurrently on DGX Spark.
This involves:
- Thousands of parallel GPU physics simulations
- Continuous neural network inference
- Continuous gradient optimization
This scale of robotics training cannot run on a laptop.
It requires the GPU memory, CUDA acceleration, and tensor compute capabilities of DGX Spark and NVIDIA's high-end GPU stack.
How we built it
This project was built entirely using NVIDIA’s GPU-native robotics and AI stack running on DGX Spark.
Isaac Sim — GPU-accelerated robotics simulation
Isaac Sim provided high-fidelity robotics simulation using:
- GPU-accelerated NVIDIA PhysX
- CUDA-accelerated physics pipelines
- Parallel simulation environments
Isaac Sim is designed specifically for NVIDIA GPUs and cannot run large-scale robotics workloads on standard hardware.
DGX Spark enabled:
- Hundreds of humanoids simulated simultaneously
- Multiple manipulation environments running in parallel
- Real-time GPU physics computation
Isaac Lab — Reinforcement learning on GPU
Isaac Lab provided reinforcement learning infrastructure using:
- PyTorch accelerated with CUDA and cuDNN
- PPO reinforcement learning algorithms
- GPU-resident policy optimization
Isaac Lab runs fully GPU-accelerated training loops, leveraging DGX Spark’s tensor compute capabilities.
CUDA, cuDNN, and PyTorch acceleration
DGX Spark enabled:
- High-throughput neural network training
- Parallel environment rollout
- GPU-resident simulation and learning pipelines
These CUDA-accelerated operations are essential to robotics training at scale.
Compound robotics training
Both humanoid and manipulation tasks trained simultaneously on the same system.
This required:
- High GPU memory capacity
- Parallel CUDA workload orchestration
- High-throughput tensor processing
This is only possible on systems like DGX Spark.
Team structure
This project was built by a team of two developers responsible for:
- Robotics simulation engineering
- Reinforcement learning implementation
- GPU compute optimization
- Training infrastructure development
Challenges we ran into
Robotics training is extremely compute intensive
Humanoid walking requires enormous amounts of experience to learn.
Each training run involved:
- Thousands of environments
- Continuous GPU physics simulation
- Continuous neural network training
This workload cannot run on laptops or consumer hardware.
DGX Spark was required.
Isaac Sim hardware requirements
Isaac Sim depends on:
- CUDA GPU acceleration
- Large GPU memory
- High tensor throughput
Running hundreds of humanoids would be impossible on standard machines.
GPU memory optimization
Training fleets of robots required careful management of DGX Spark GPU memory.
Training stability
Humanoid policies initially failed and required reward tuning.
Manipulation complexity
Drawer opening required precise physics and reward design.
Accomplishments that we're proud of
Built a robotics training platform that only DGX Spark makes possible
This project could not run on a laptop.
It required:
- CUDA acceleration
- GPU-native simulation
- High memory capacity
- High-throughput tensor compute
All provided by DGX Spark.
Successfully trained fleets of humanoids
Humanoids learned walking behaviors entirely through reinforcement learning.
Successfully trained robotic manipulation
The robot arm learned to open a drawer through physics interaction.
Demonstrated compound robotics training
Multiple robot types trained simultaneously on a single system.
Achieved this with a team of two
DGX Spark dramatically increased development leverage.
What we learned
Compute is the primary bottleneck in robotics
More compute enables:
- More environments
- Faster training
- More complex behaviors
DGX Spark enabled this scale.
Isaac Sim and Isaac Lab require high-end NVIDIA GPUs
These frameworks are designed for accelerated computing systems.
They cannot run large-scale robotics training on laptops.
GPU-native robotics is transformative
Running simulation and learning on CUDA dramatically accelerates development.
Compound robotics training is achievable
Multiple robot classes can train simultaneously.
What's next for Platform for Compound Robotics
This project is the foundation for a compute-scaled robotics platform.
Next steps include:
Scaling fleet size
- Thousands of humanoids training simultaneously
Multi-robot collaboration
- Humanoids and robot arms working together
Integrating additional NVIDIA stack components
Future versions will integrate:
- Triton Inference Server for deployment
- TensorRT for optimized inference
- RAPIDS for robotics data analysis
Sim-to-real transfer
Deploying trained policies onto physical robots.
Platform for Compound Robotics demonstrates that modern robotics progress depends on accelerated computing — and that DGX Spark unlocks robotics capabilities that would otherwise be impossible.
This project could not run on a laptop.
It required DGX Spark and NVIDIA’s GPU-native robotics and AI stack.
DGX Spark enabled a new scale of robotics training.


Log in or sign up for Devpost to join the conversation.