Inspiration
I thought about this project to solve a big problem we have nowadays. Plastic pollution is a critical threat for our world and we need to act as soon as possible to save this world. In fact globally there are about 8.3 billion tons of plastic from which 6.3 billion tons are pure trash. This project aims to detect different types of plastic and collect it from our cities and from locations considered dangerous for a human being.
What is it?
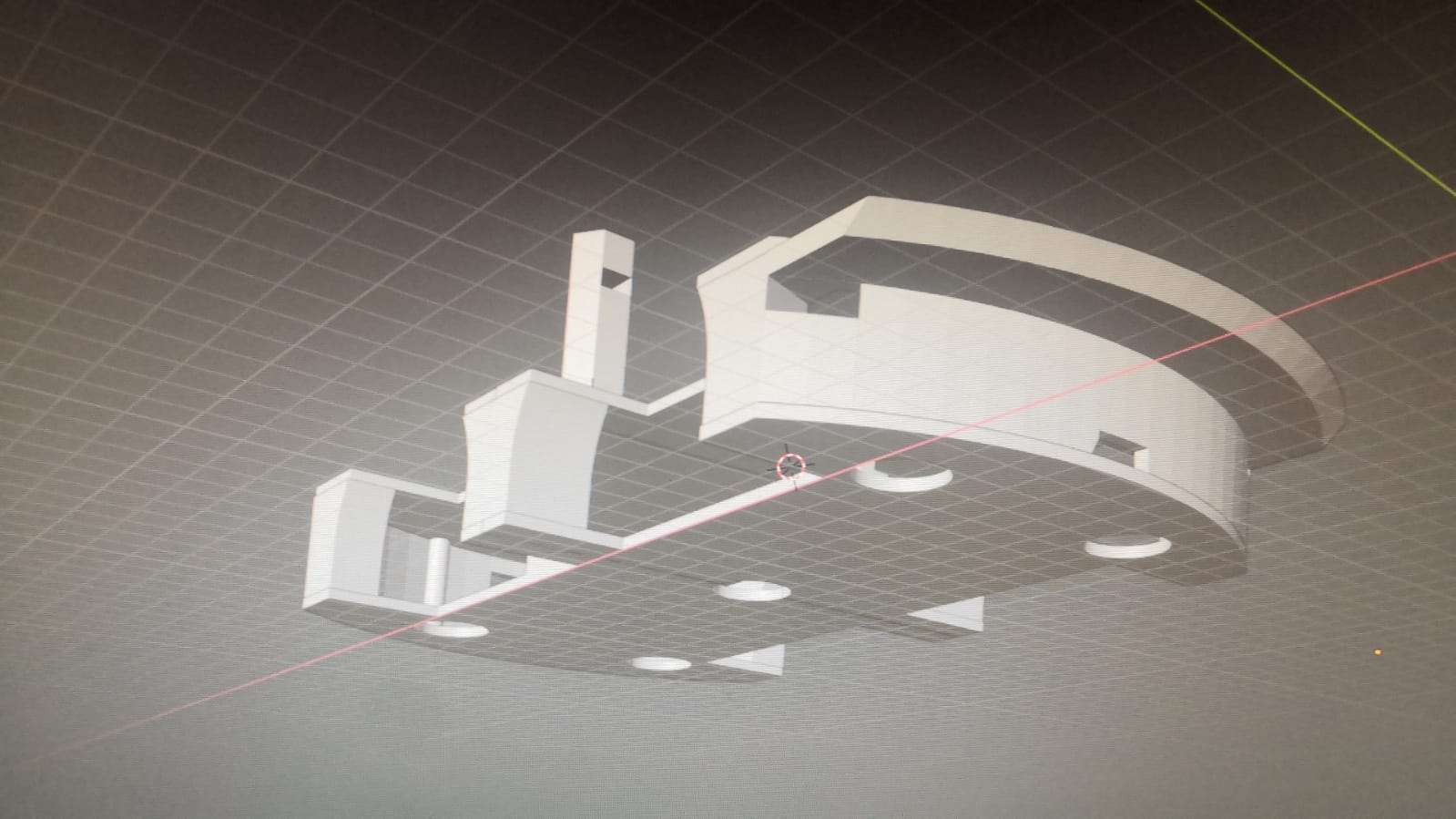
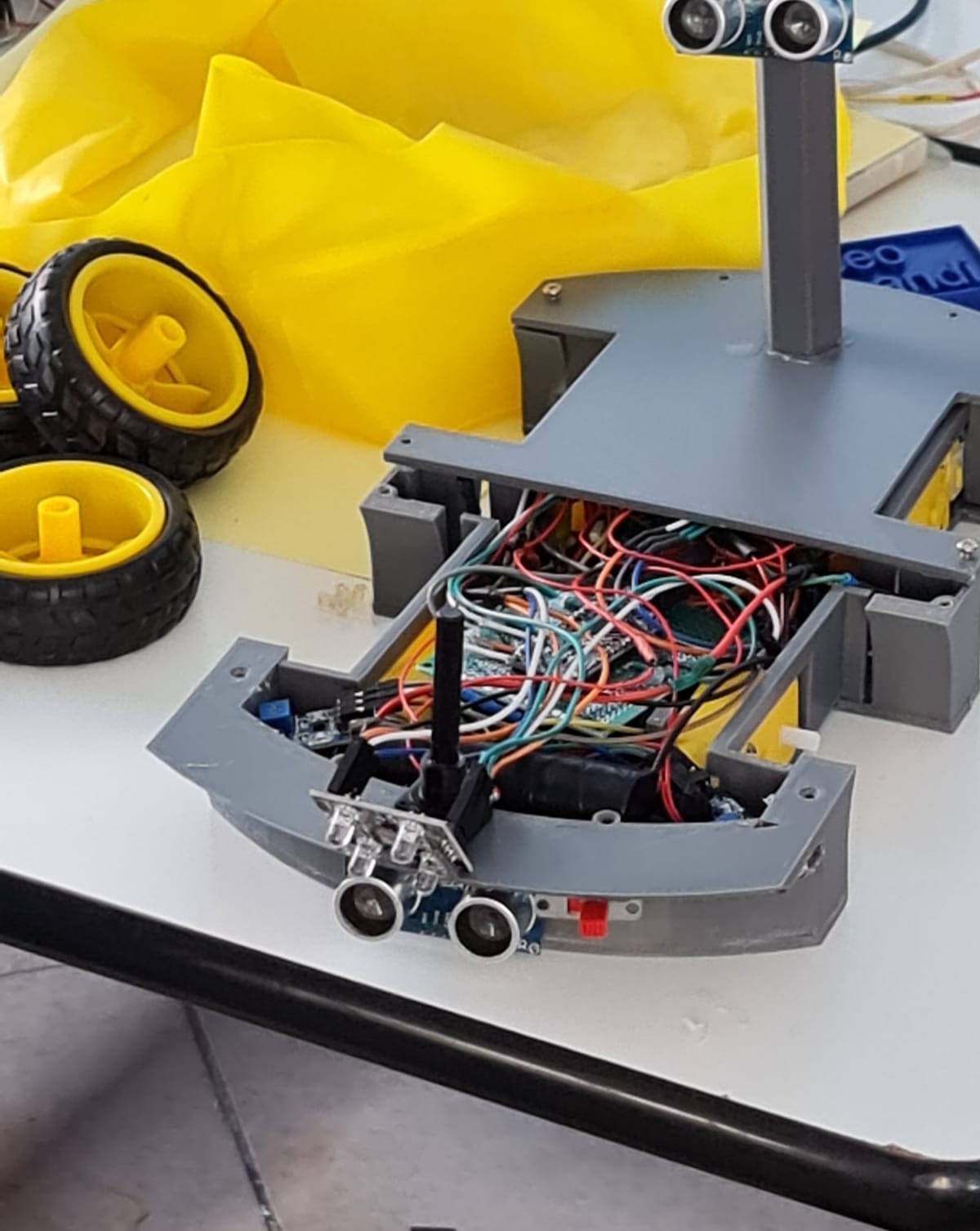
Plastic Buster is the idea of a robot capable of moving autonomously in different locations, capable of detecting and classifying different of plastic and capable of colleting it from cities and other various dangerous or unaccesible locations for human beings such as power plants. I built the prototype of the final "Plastic Buster". Because of time and funds shortage I wasn't able to build the ultimate version but I came up with a prototype. It has been made completely from scratch with various difficulties and problems.
How we built it and how does it work?
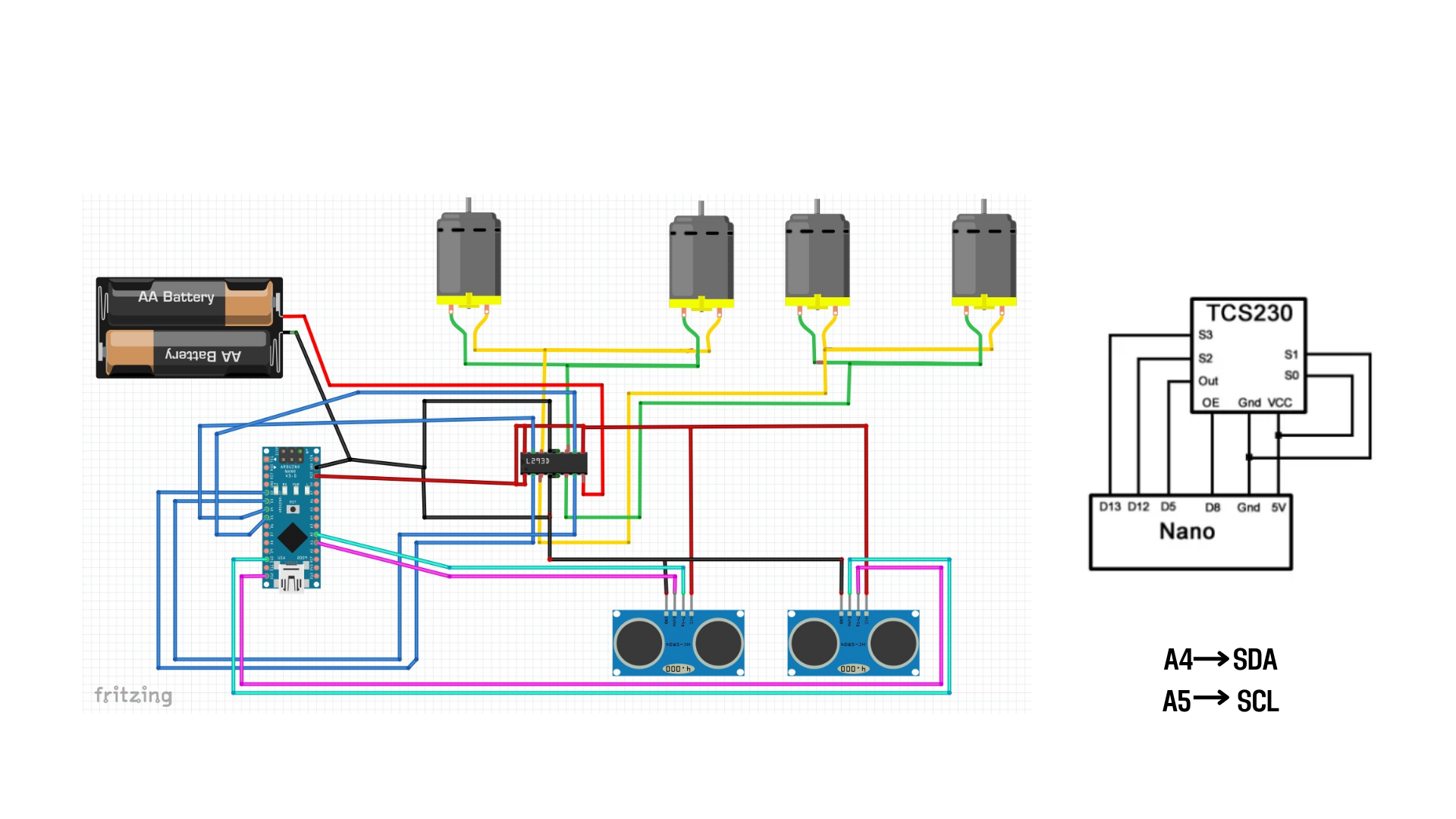
This robot is controlled by a central board named Arduino which is programmed in the C language. Actually there are 2 arduinos working together in fact they are connected by A4->SDA and A5->SCL connections. One arduino, which is the Arduino UNO, is connected to motor shied l293d shield to control the motors, to the 2 hc-sr04 ultrasonic sensors, to 2 IR sensors and a buzzer. The other arduino, which is a nano, is connected to the color sensor RGB TCS3200. The robot is capable of moving autonomously thanks to the 2 ultrasonic sensors and it's very accurate with the addon of the 2 IR sensors on the front edges. When the robot finds an obstacle with the lower ultrasonic sensor and the upper one means it's a big obstacle, so it changes it's direction. But when it founds an obstacle only with the lower sensor, it does a recognition of the color of the object and if this color is already insert in the arduino nano's database it sends the signal to the Arduino UNO which makes an acustic sound with the buzzer. For this prototype I used the color sensor to analyze the object but the final Product should have a camera and a spectrometer for a better analyzies. I wasn't able to use the spectrometer because it costs a lot and I had also a small amount of time to build it.
As for the code, I wrote the working code for the Arduino Uno from scratch, but for the color sensor I implemented the code written by Xtronical who used the color sensor to detect skittles colours. I had to modify the code a lot in order to make the system recognize only a particular color and then send the data to the main Arduino in order to make the sound with the buzzer.
Challenges I ran into
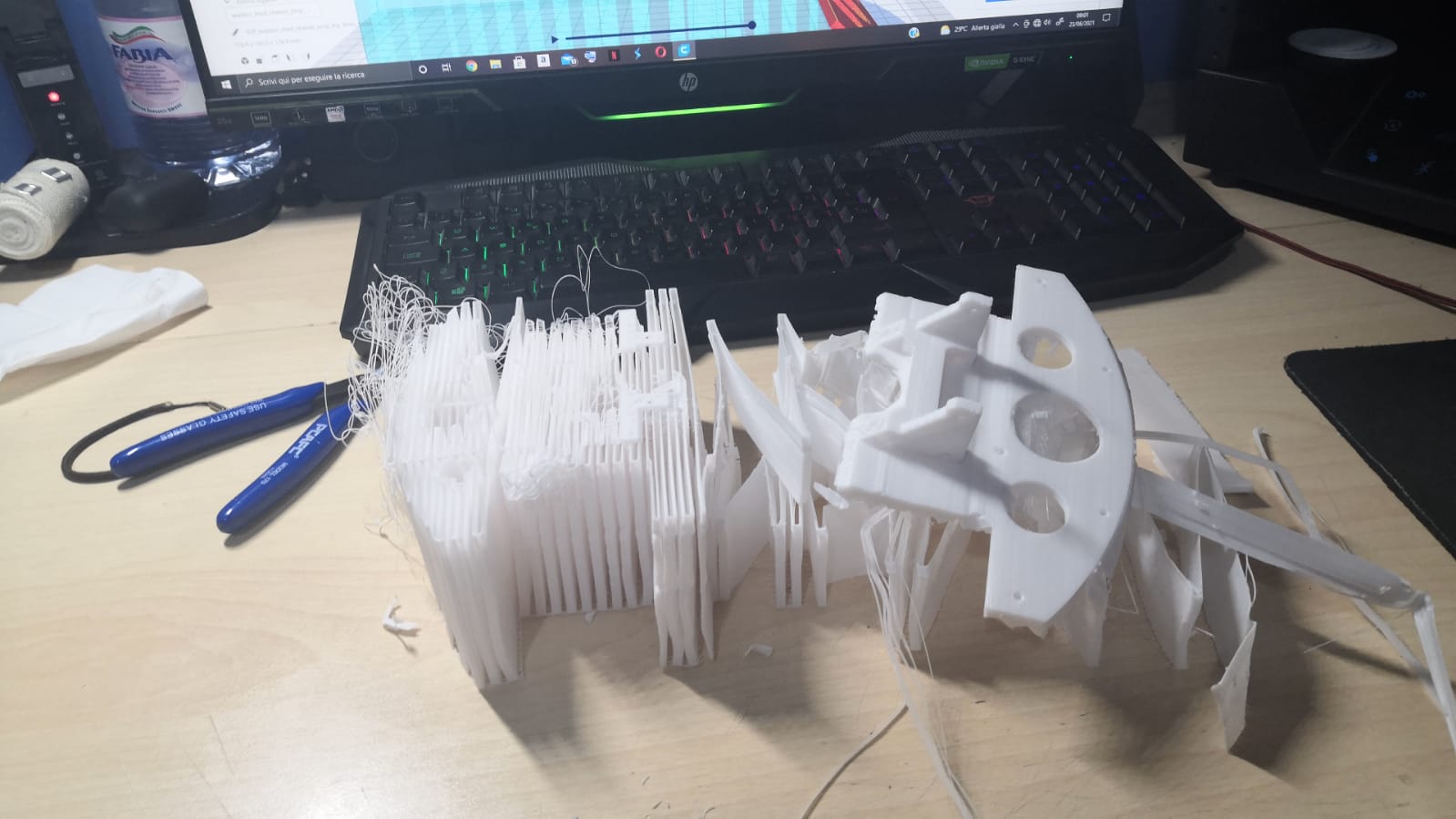
There were many obstacles from the 3d printing parts to the hardware to the software. The first 3d prints failed and it was challenging to complete the 3d stamps in time but I found out the problem with the heating immediately and solved the problem. As for the hardware and software I had difficulties connecting the two arduinos together and make the data flow between them.
What I learned
I learned that even if you get problems at the very beginning you shouldn't fear and just continue toward your goal. I learned about the EEPROM memory in arduino, which is used to store data. It was fascinating discovering it because I didn't even imagine that it was possible.
What's next for Plastic Buster
My goal is to build something to make this world a better place to live. I think this project has lots of potential and can turn to reality with no much difficulty. The final idea can be implemented in various locations with various benefits. For example this project born to clean out cities from plastic but with better versions it can also detect other materials. With a different hardware it can be implemented also in oceans and other locations unreachable to the human because of safety issues.
If implemented in cities it can be 100% green with a station to recharge it powered by solar energy.

Log in or sign up for Devpost to join the conversation.