My inspiration behind this project was to allow me to have an automatic bartending system implemented. I could set up a bar that has a black line integrated into it that I could just set down this robot, press a button and the robot, equipped with a weight sensor and RF transmitter (later additions), could fill a beer automatically and return the filled glass back to me.
What it does
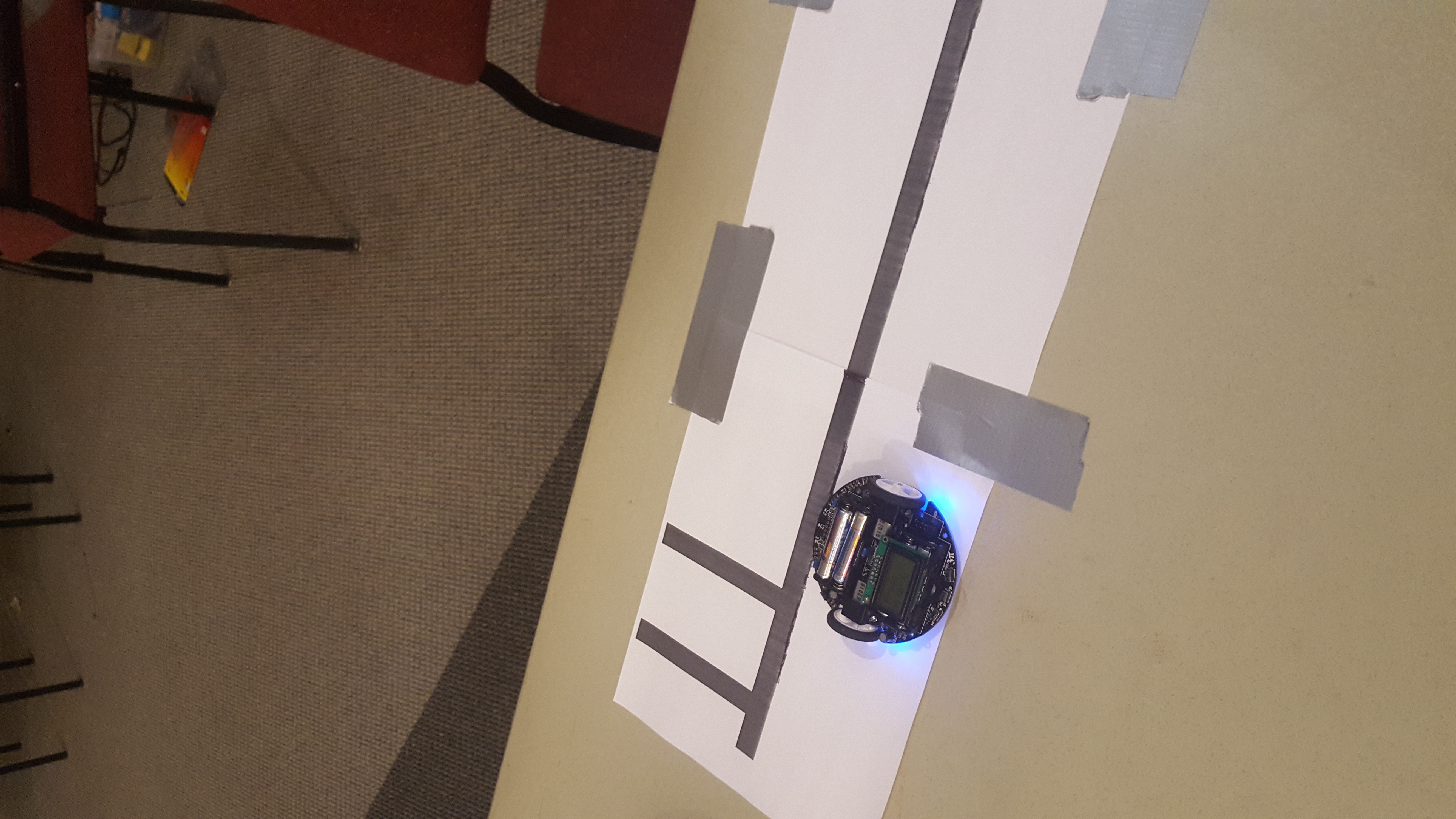
Currently the robot only takes in an order to go left or right and finds the first "rail" that was on the opposite side from where it started and ends there. However, to make it more fun / give a challenge, I decided to make the modify some of the pre-made code in order to try and make the robot seem a little bit more like the customers.
How I built it
I used a lot of the built in libraries in order to complete this build. Adapting code from an old maze solving program, I was able to ensure that the robot comes and returns each time.
Challenges I ran into
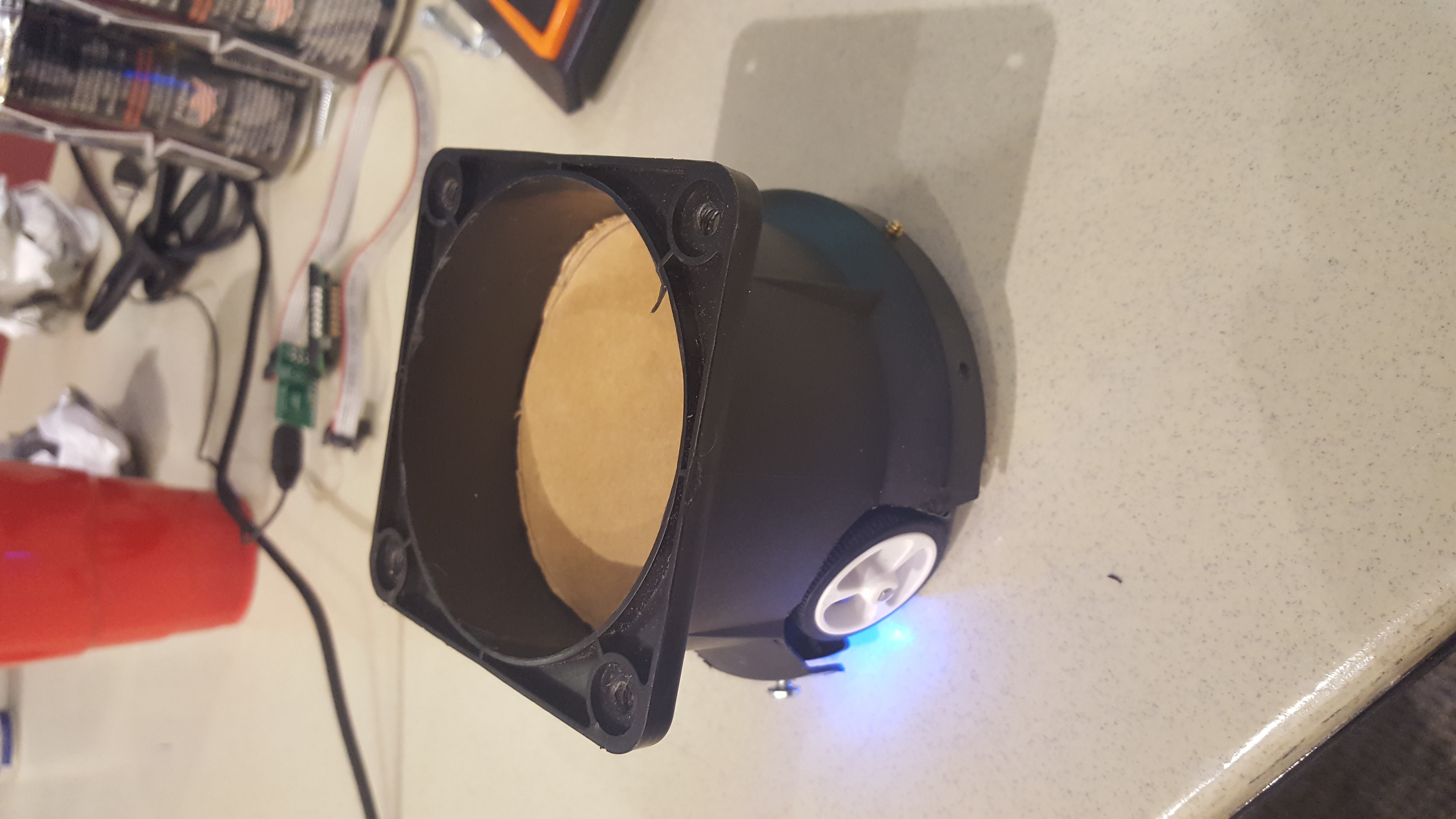
There were quite a few challenges that I had. The main one was getting the cup holder to stay attached. I think if I would of stuck with my original plan to try and 3D print the design, it would of been a much better end product. Right now, it really does not serve much of a purpose. It kind of just goes to one place and back again, which is far from what I wishing for.
Accomplishments that I'm proud of
I am proud that I at least came up with something I wanted to implement and was at least able to provide the appearance of it working. This is the first hacking project that I have ever done by myself from idea to implementation, so I feel a got so much out of the experience.
What I learned
I learned a lot about what not to do when you want to 3D print a part, and designing mechanical systems using pre-existing parts rather than making the from scratch. I also learned quite a bit about PID controls and how robust they can be.
What's next for "Pint" Sized Robot
If I wanted to continue further, I would definitely look to make the cup holder from scratch in order to actually be able to carry a cup. Also custom electronics would be a must. Also adding the ability to set up multiple lines to avoid collisions on the tracks is something that needs to be done. I think there is a lot more that could be approved on to make this project more fleshed out, but I think that could lead to some more fun down the road.
Built With
- pololu-3pi

Log in or sign up for Devpost to join the conversation.