-
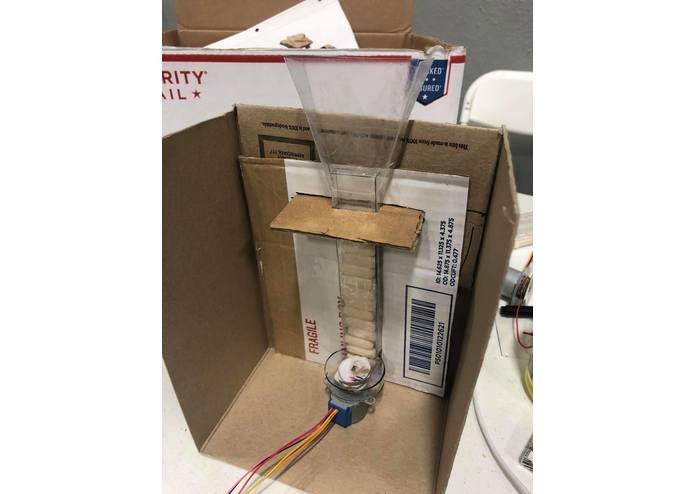
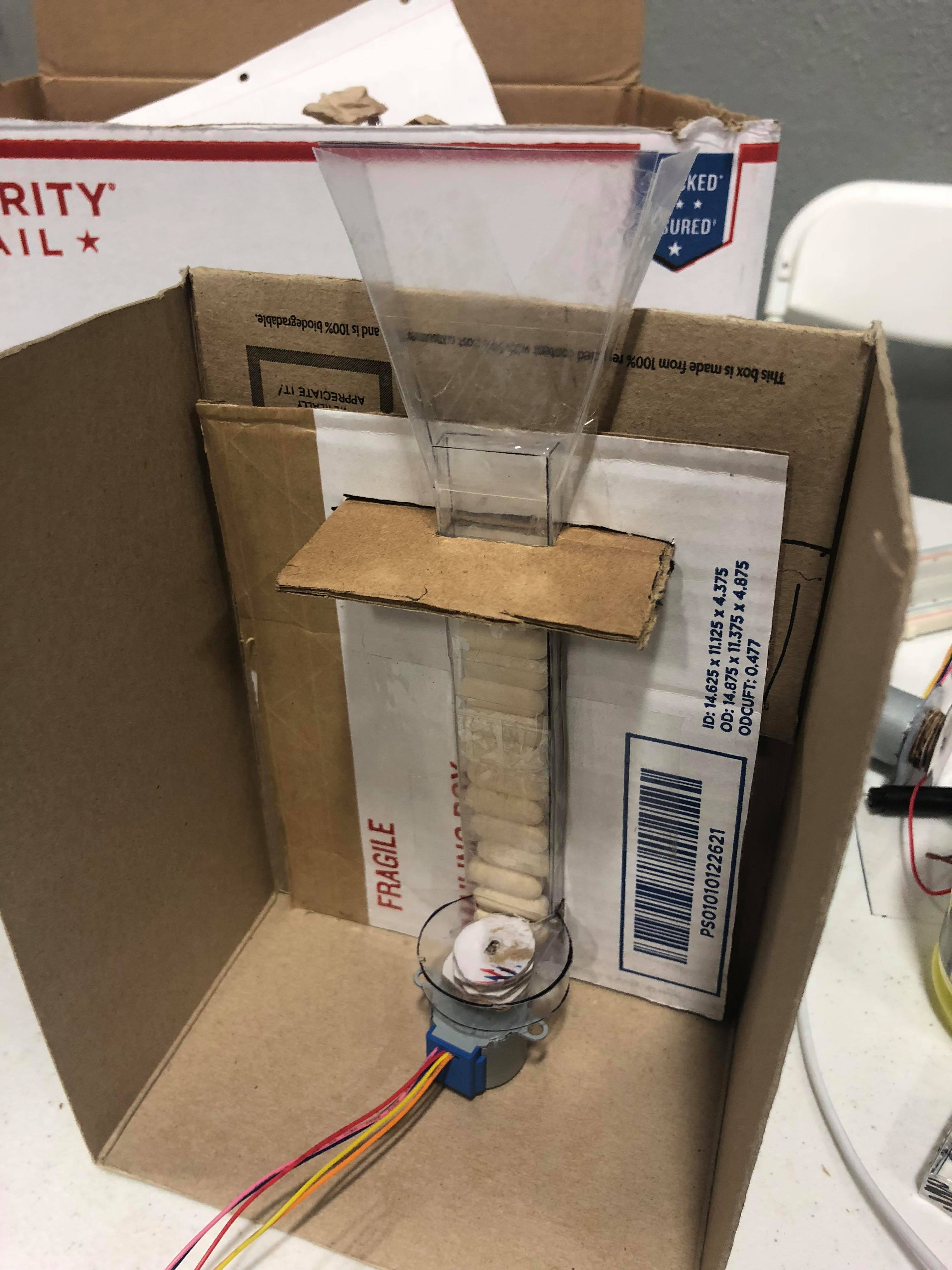
The mechanical parts handling the dispensing of the pills
-

The electronics dealing with the buzzer and electronical parts of the product
-

The outer view of the product


Inspiration
Having to visit my grandfather in the hospital for the past few years, I bumped into several situations of elderly people not remembering to take their pills at the right time. With this, we decided to come up with an automated way of dealing with this issue.
What it does
The pill dispenser acts as an automatic pill dispenser that dispenses certain pills according to a certain time set by the user. It also helps to remind the user in several physical stimulus such as sound and light.
How I built it
The product was built using an Arduino board with Stepper Motors,LCD backlight, a buzzer and a LED light connected to it. The hardware is then programmed using C to control the movements of the stepper motors as well as the activation of the buzzer and LED light.
Challenges I ran into
There were multiple challenges that we ran into. Most of them were issues we had with the lack of hardware provided. For instance, we were not provided a Real Time Clock to detect the current time. We were also not able to use Solidworks or 3D printers to construct our model. To problem solve it, we used cardboard and some plastic materials that we were able to recycled materials to build the chassis of the product. Due to the lack of material, we were only able to come up with a proof on concept.
Accomplishments that I'm proud of
As a team, we are proud that we able to build the prototype of our product out of only recyclable materials even though non of us have experience with industrial design.
What I learned
As a team, we learned about the flexibility of developing using Arduino and also how to design products using recyclable materials.
What's next for PillDispense
Building the product with a rigid and solid chassis to sustain rigorous movements. The product will also be expandable to more numbers of pills as well as to include multiple functions such as reminders and handling emergency calls. Furthermore, we want to make the PillDispense more portable than it currently is so that it may be implemented in different locations. If possible, we will want to implement it with a working robot.

Log in or sign up for Devpost to join the conversation.