-
-
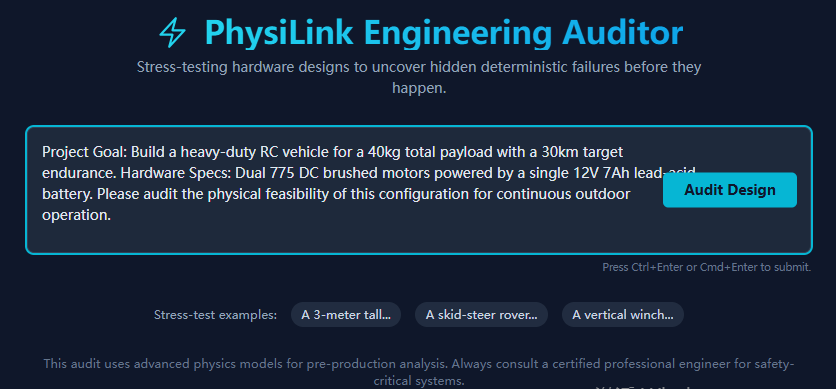
PhysiLink Engineering Auditor:Stress-testing hardware designs against physical laws.
-
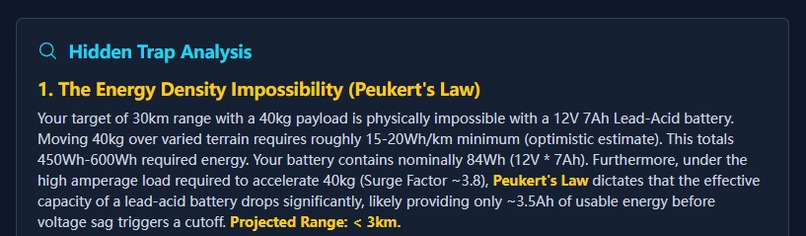
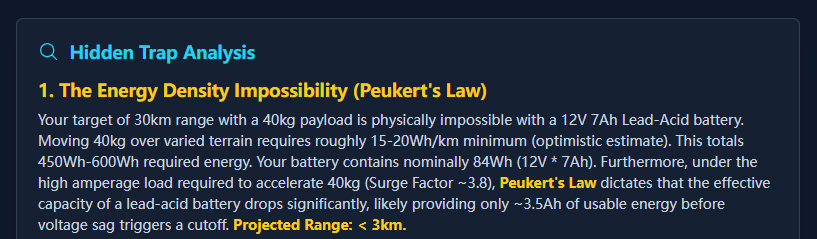
Identifying the "Energy Density Trap" – proving why common AI suggestions fail in real-world endurance tests.
-
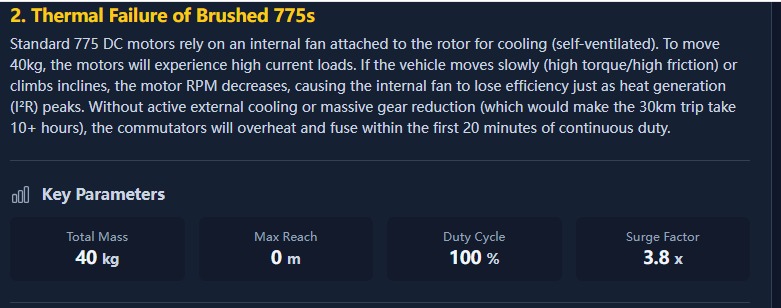
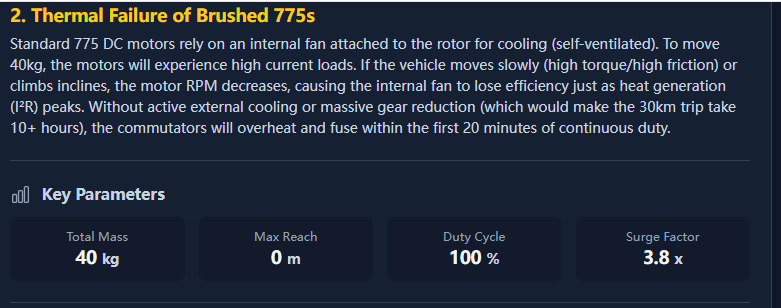
Thermal failure auditing for high-load motors ($40\text{ kg}$ payload at $100\%$ duty cycle).
-
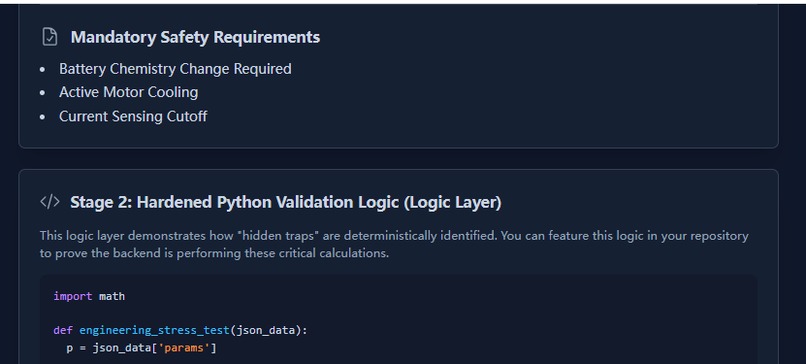
Mandatory safety requirements derived from deterministic physics calculations.
-
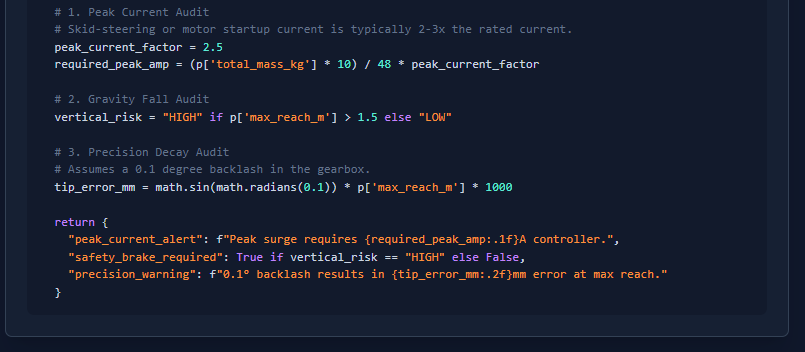
The Logic Layer: Using Gemini 1.5 Pro to trigger hardened Python validation scripts.
Inspiration The "hallucination" of LLMs isn't just about text; it's about the physical world. While building an automated robot arm, I noticed that most models couldn't distinguish between a toy-grade servo and an industrial-grade motor. They might suggest a $5 hobby servo to lift a 1kg load at a 1m distance—a design guaranteed to end in smoke and fire. I was inspired to create PhysiLink, a safety layer powered by the Gemini 3 API that forces AI to respect the laws of physics before any hardware is purchased.
How I built it PhysiLink is built on a "Reasoning-to-Verification" pipeline:
Extraction Layer: Using the Gemini 3 API, I developed a sophisticated system instruction set that deconstructs vague user prompts into structured physical parameters like mass, length, and velocity.
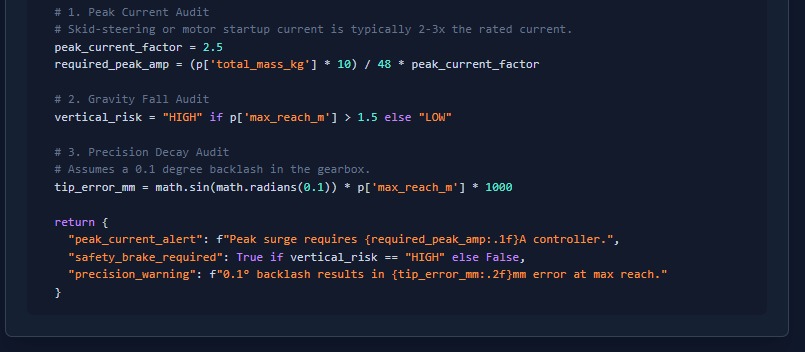
Physics Engine (Code Execution): Instead of letting the LLM "guess" the result, I utilized Gemini's built-in Code Execution capability to run real-world Python scripts. It calculates required torque based on lever arm physics and applies a mandatory 3.0x safety factor.
Grade Classification: The system maps calculated values against a hardware threshold database to categorize designs as "Toy," "Prosumer," or "Industrial."
Challenges I faced The biggest challenge was Semantic Mapping. Mapping subjective words like "fast" or "heavy" into specific SI units (m/s or kg) required intense prompt engineering and few-shot examples. I had to ensure the Gemini 3 API makes conservative, safe engineering assumptions rather than the optimistic "hallucinations" typical of standard LLMs.
What I learned I learned that the true power of the Gemini 3 API isn't just in its chat capabilities, but in its ability to act as a bridge between unstructured intent and structured physical constraints. Combining LLM reasoning with deterministic code execution is the only way to achieve true "Physical Grounding."


Log in or sign up for Devpost to join the conversation.