-
-
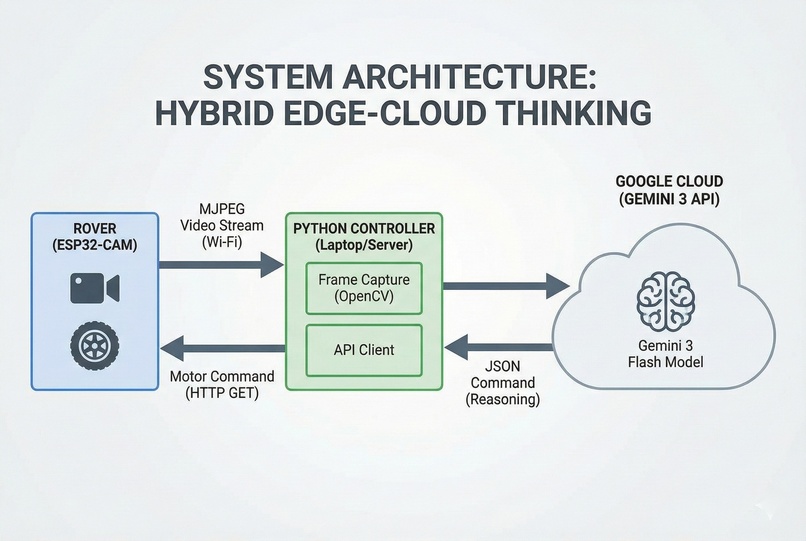
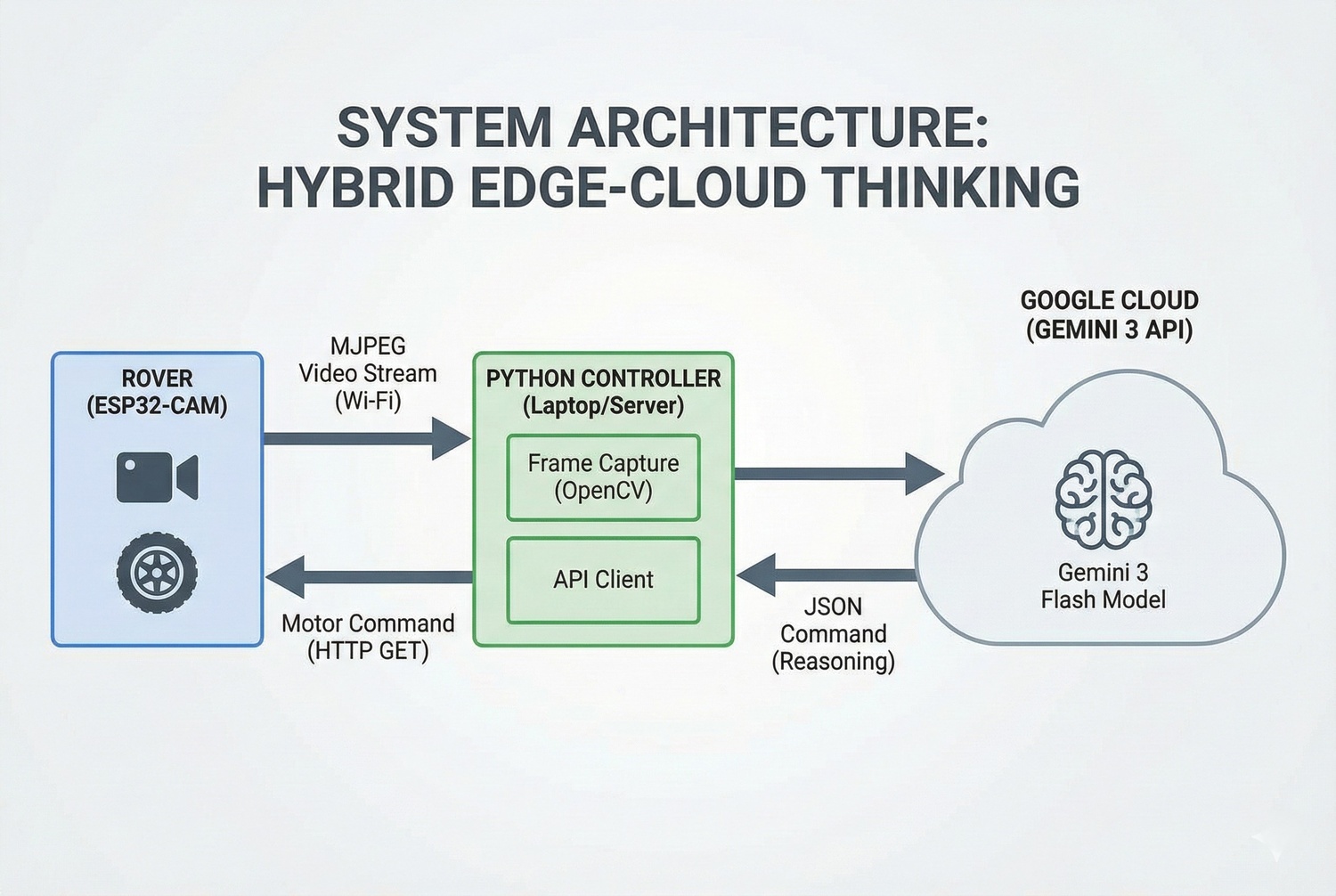
The System Architecture
-
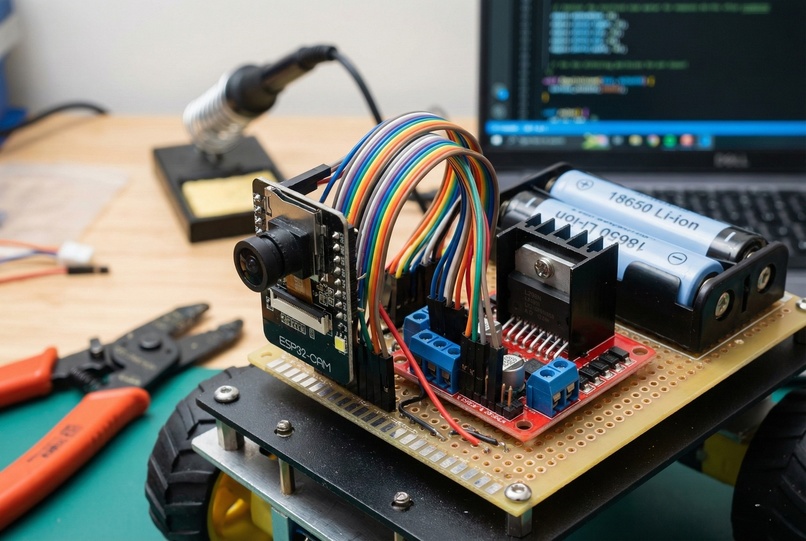
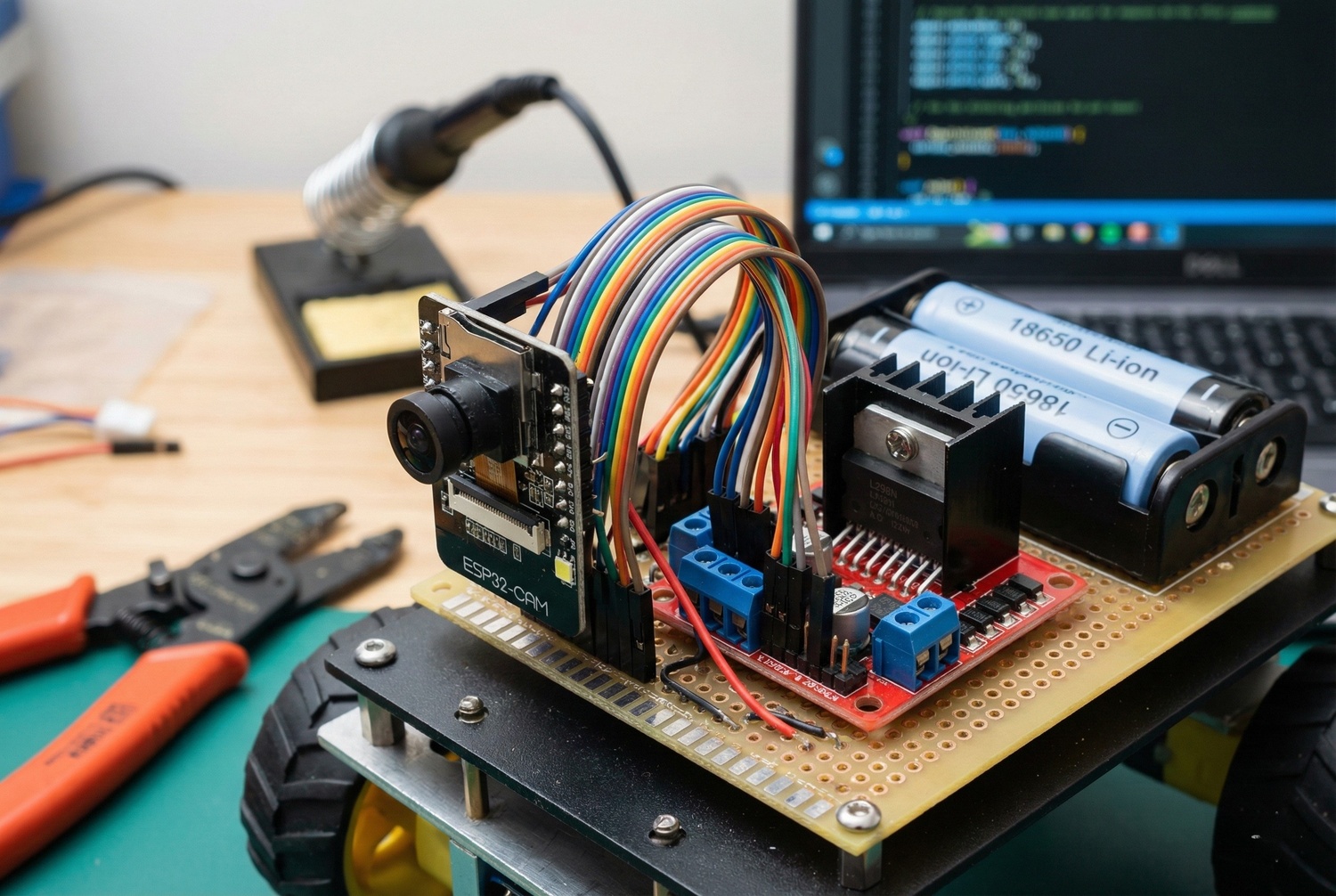
The Hardware Close-up (Proof of Build)
-

The Hero Thumbnail (Futuristic Concept)
-

The Action Shot (Real-World Navigation)
-
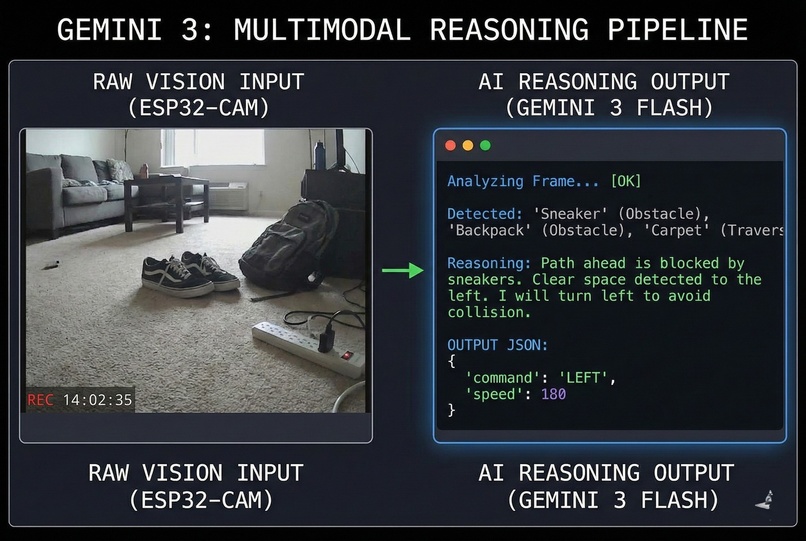
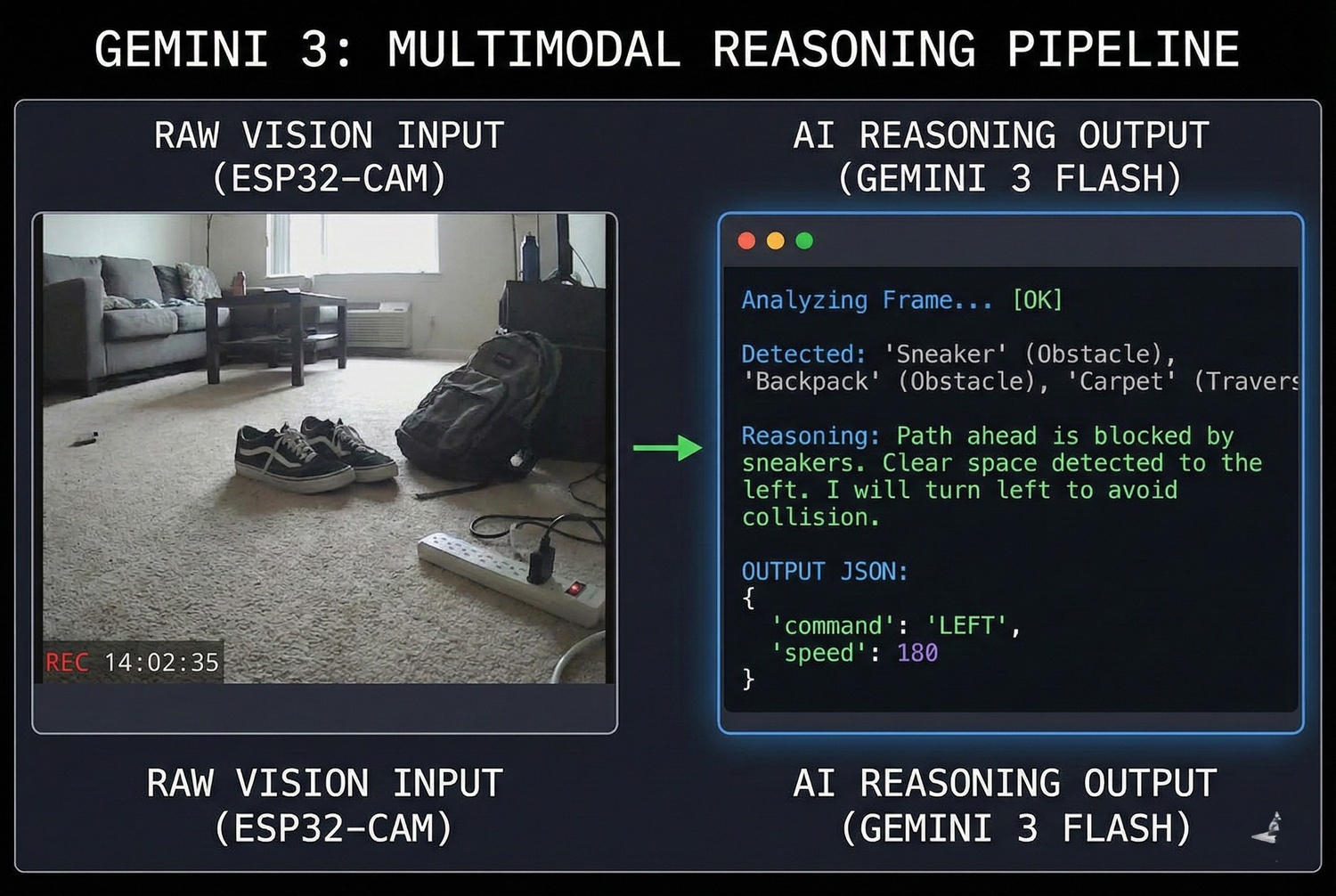
The "Vision" (How it Thinks)


Inspiration
We are living in the golden age of AI. Models like Gemini 3 can write poetry, debug complex kernels, and reason through scientific papers. Yet, there is one massive limitation: AI is still trapped behind a glass screen. Most "Agentic" workflows today are just software talking to software—an LLM calling a database or a web scraper. We wanted to build something different. We wanted to explore Embodied AI—giving a Large Multimodal Model (LMM) a physical body and the agency to move through the real world. We asked a simple question: Can we replace the entire navigation stack of a robot (LIDAR, SLAM, Object Detection) with a single call to the Gemini 3 API?
What it does
Physical World-Gemini Scout is an autonomous rover that uses Gemini 3 Flash as its visual cortex and decision-making engine. Unlike traditional robots that follow hard-coded paths or rely on specific object detection models (like YOLO), Scout "looks" at the world and "thinks" about it. It Sees: Streams live video from an on-board camera. It Reasons: Analyzes the scene for obstacles, terrain types (carpet vs. tile), and context (fragile objects vs. robust obstacles). It Acts: Decides on movement commands (Forward, Left, Right) to navigate toward a goal or simply explore without crashing.
How we built it
We built Scout using a "Hybrid Brain" architecture to balance cost and intelligence.1. The Body (Hardware)Microcontroller: ESP32-CAM (Cheap, low-power, Wi-Fi enabled).Actuators: 4x DC Motors with an L298N Driver.Power: 2x 18650 Li-ion batteries.2. The Brain (Software)The ESP32 acts as a "dumb terminal," streaming raw MJPEG video over Wi-Fi. The heavy lifting is done by a Python control loop running on a host machine:We capture frames using OpenCV and send them to Gemini 3 Flash with a specialized system prompt.We force the model to output structured JSON containing its reasoning and motor commands.3. The MathTo make the movement smoother, we implemented a simple heuristic for the "Confidence Score" ($C$) of a path, asking Gemini to rate safety.$$S_{path} = \alpha \cdot (1 - P_{obstacle}) + \beta \cdot I_{clearance}$$Where $P_{obstacle}$ is the probability of an obstacle and $I_{clearance}$ is the width of the clear path. Gemini estimates these variables intuitively from the pixel data.
Challenges we ran into
The Latency Loop: Real-time robotics usually requires millisecond-level reactions. Sending an image to the cloud and waiting for a response takes time (~500ms - 1s). To fix this, we implemented a "heartbeat" safety stop on the microcontroller—if it doesn't receive a new command within 200ms, it halts automatically to prevent runaway crashes during lag spikes. Visual Hallucination: Initially, the model would confidently say "Path Clear" while staring at a white wall because it looked like an open floor. We solved this by improving the system prompt to force "Chain of Thought" reasoning, explicitly asking the model to identify textures before deciding to move.
Accomplishments that we're proud of
True Zero-Shot Navigation: We didn't train any custom models. The rover can identify a "shoe" or a "cable" without us ever writing code for those specific objects. Complex Reasoning: Seeing the rover refuse to drive over a pile of wires because it "might get tangled" was a huge win. It showed the model understands physical consequences, not just bounding boxes. Building it Fast: We went from a pile of parts to a working AI-controlled rover in under 48 hours.
What we learned
Gemini has "Physics Intuition": We were surprised to find that Gemini 3 understands physical properties implicitly. It knows that glass is fragile and curtains are soft. Multimodal is the future of Robotics: Removing the need for specific sensor stacks is a game changer. We proved that visual data + reasoning is enough for basic navigation.
What's next for Physical World-Gemini Scout
We plan to integrate Gemini Live (Audio) to create a fully interactive pet. Voice Command: "Scout, come here!" (Audio processing) Visual Search: "Find my keys." (Object localization) Gemini Scout is just the beginning of robots that don't just compute—they comprehend.

Log in or sign up for Devpost to join the conversation.