-

The water-jetted aluminum deck.
-

-

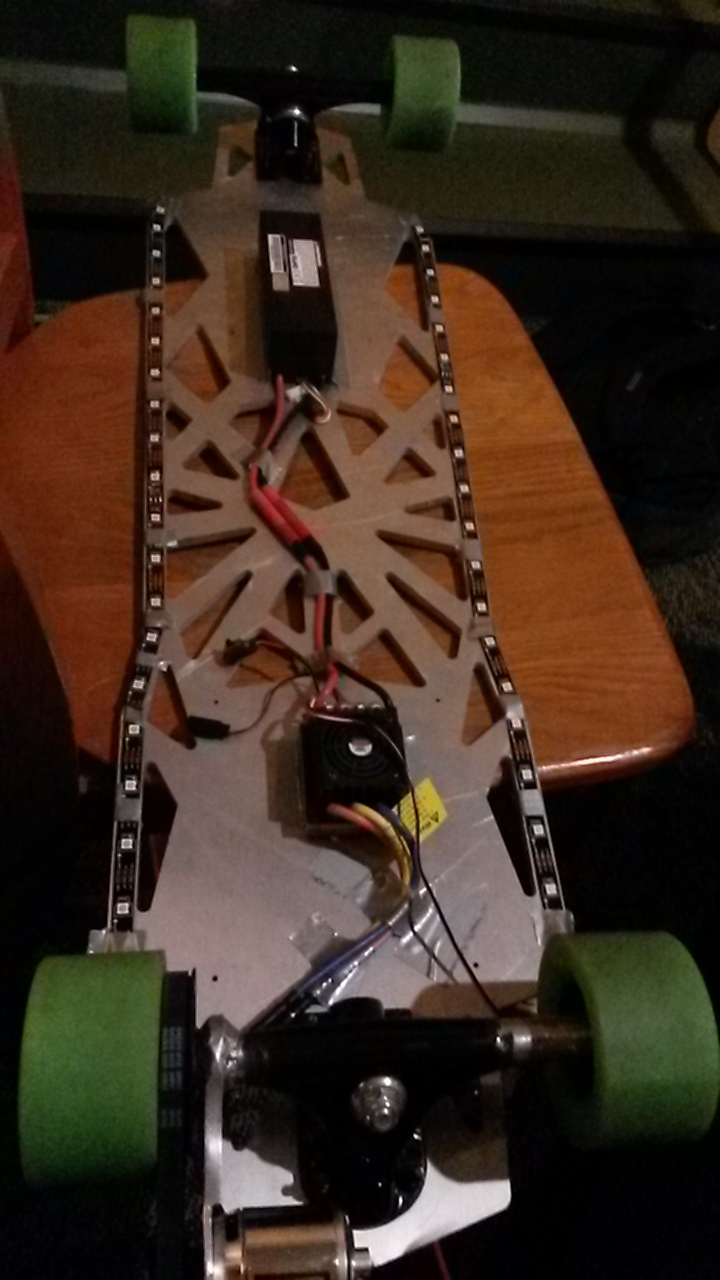
The underside of the board.
-

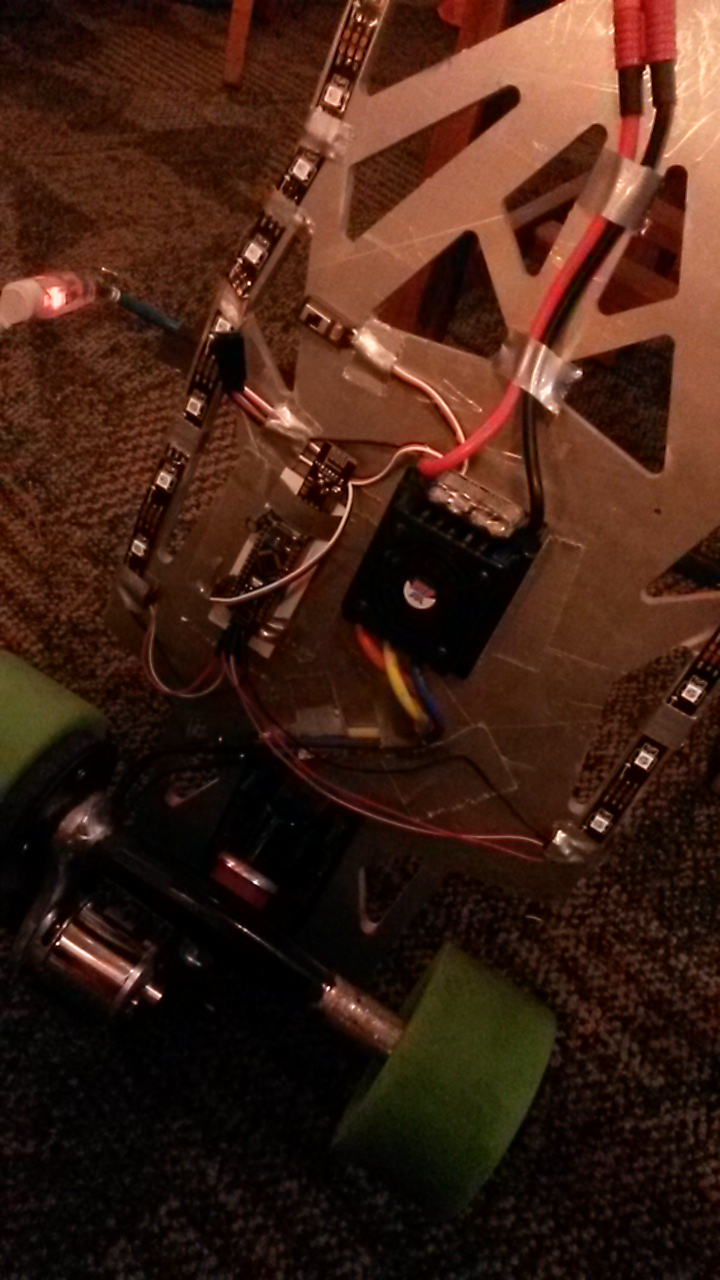
A close up of the motor unit.
-

The remote unit joystick with a laser cut acrylic enclosure.



Phantom is an electric longboard that appeals to the lazy soul.
Inspiration
Other people at Caltech have made their own aluminum longboards. We wanted one for ourselves, but as many of the team members are EE, we wanted to add an electronics flair.
Phantom is thinner and lighter than the ones we see zooming around campus. More importantly, it has the ability to automatically propel you forward. After all, the most annoying part of longboarding is having to push off every few feet.
What it does
It goes fast!
Phantom is driven by a brushless DC motor that propels you forward so your legs don't have to. This motor even has enough torque to allow the longboard and its rider to go up small inclines without a problem.
Its underdeck LED lighting not only looks cool, but it also improves visibility at night. Using the remote, turn signals can be activated to alert surrounding pedestrians and vehicles.
How we built it
The chassis of the longboard was designed in CAD software and water jetted from a 5/16" sheet of aluminum. The trucks (wheels and axles) were purchased online and modified to accommodate the motor components. A belt drive pulley system was welded onto the back left axle to drive the wheel.
The entirety of the system can be described in two components: the remote unit, and the motor unit. The remote unit consists of a hand-held joystick that controls the speed of the Phantom wirelessly. The motor unit responds to this user input by moving the board at the desired speed. For each of these two units, a printed circuit board was designed and milled in-house.
The systems are controlled by two Arduino Nanos connected wirelessly via nRF24L01+ boards. Using color blending techniques, the LEDs scroll bright green in the opposite direction of movement in order to create the illusion that the lights are not moving. Additional functionality in the form of LED turn signals was added to the remote.
Challenges we ran into
At first, we had big plans to implement state-of-the-art motor control technology using field-oriented control (FOC). Halfway through, however, we decided that these plans were a bit too ambitious to accomplish within the 36-hour timeframe of the hackathon. We've put aside our FOC prototypes to work on later. Luckily, we had planned ahead, purchasing an off-the-shelf motor controller that could easily be integrated into the system.
What we learned
We've learned that it pays off to have a backup plan because sometimes challenges can arise where you least expect. Without the pre-purchased motor controller, the Phantom project would have been dead in the water.
What's next for Phantom
We aim to finish implementing FOC in order to provide better performance at low speeds. The addition of a second motor would improve performance at higher speeds. Finally, we would like to create an enclosure to protect the on-board electronics. With these improvements, the next-generation Phantom will be Phan-tastic!
Built With
- altium-designer
- arduino
- brushless-dc-motors
- cad
- laser-cutter
- leds
- nrf24l01+
- pcb-mill
- water-jet




Log in or sign up for Devpost to join the conversation.