-
-
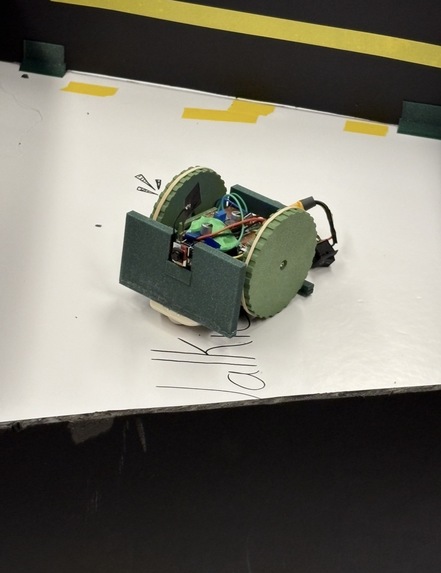
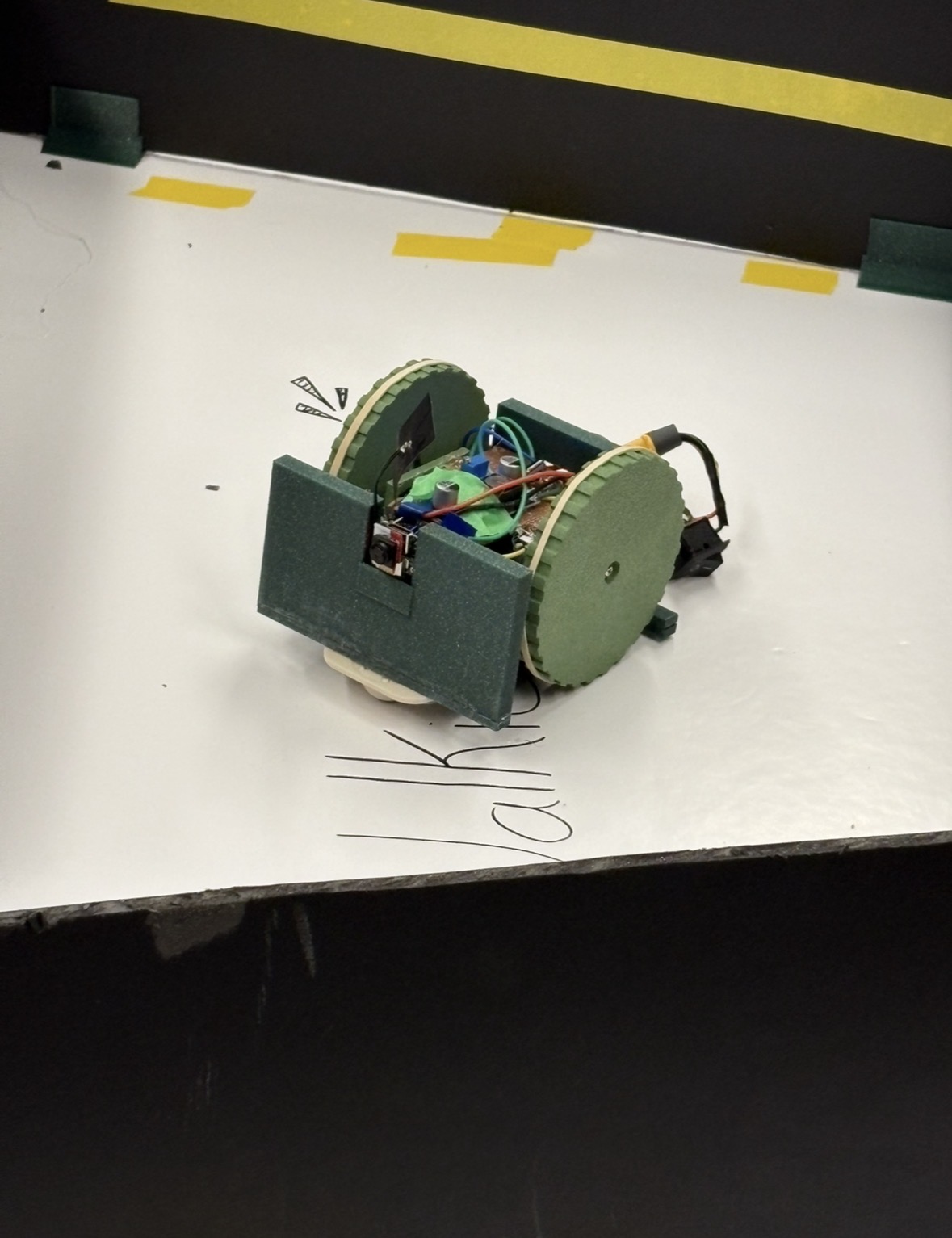
prototype build
-
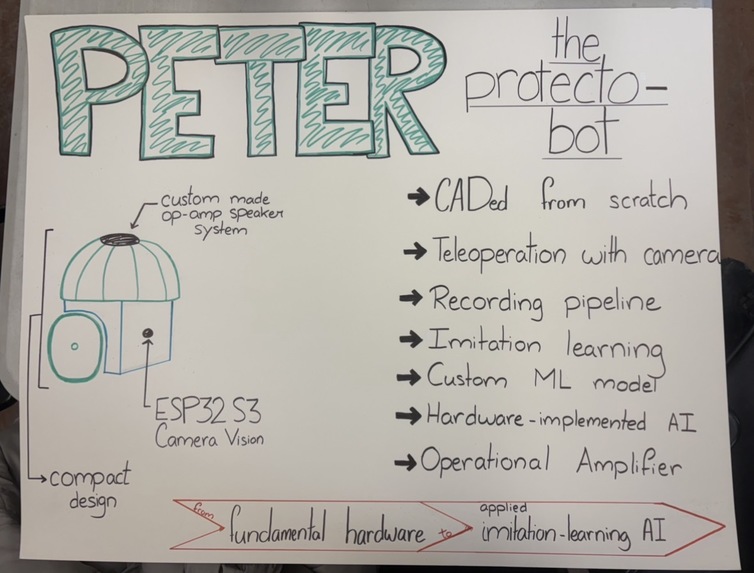
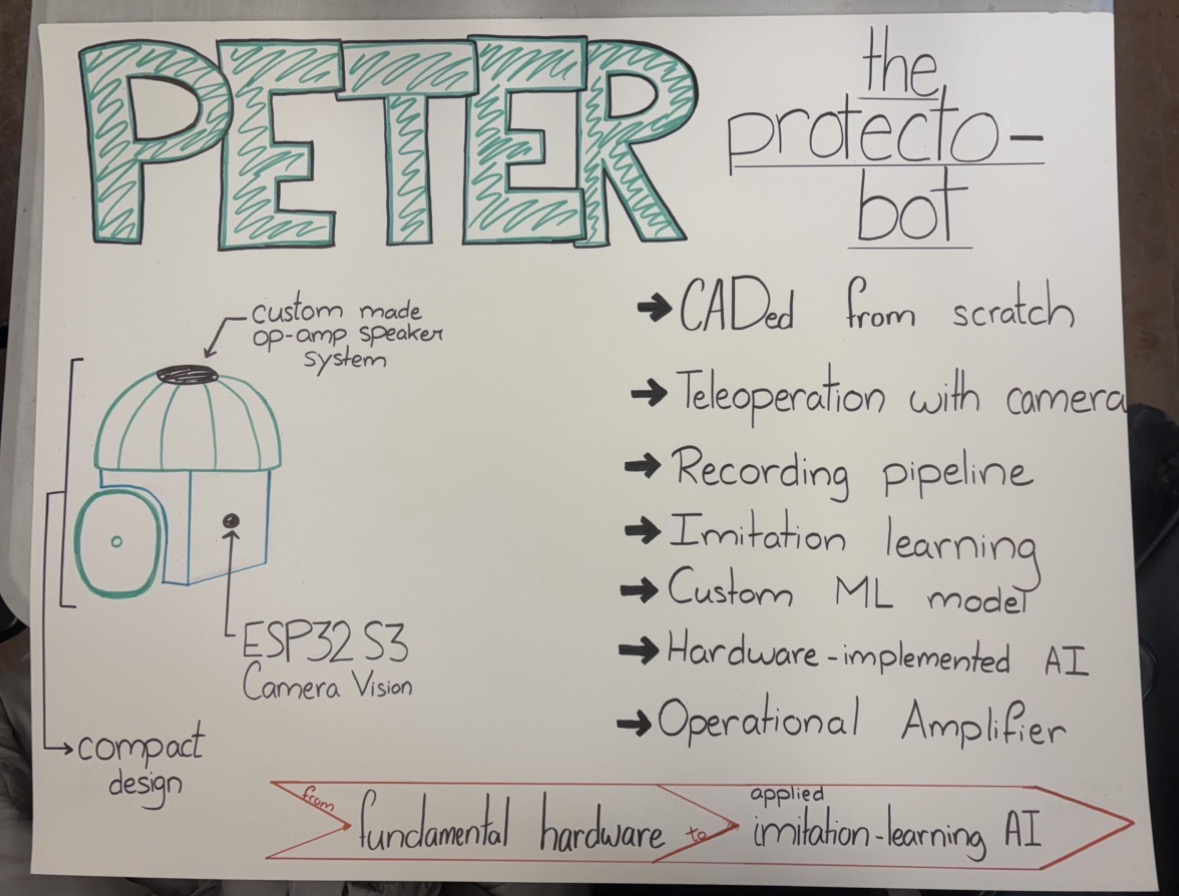
poster board
-
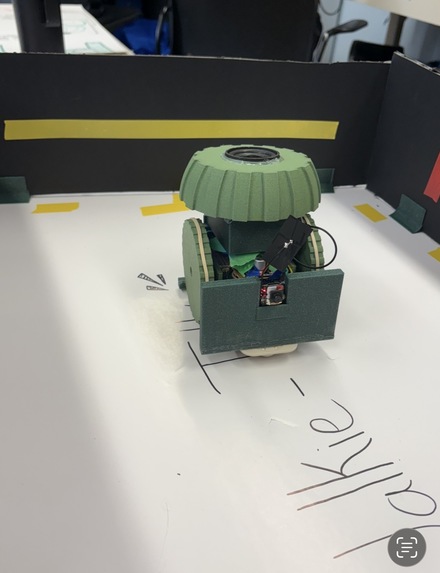
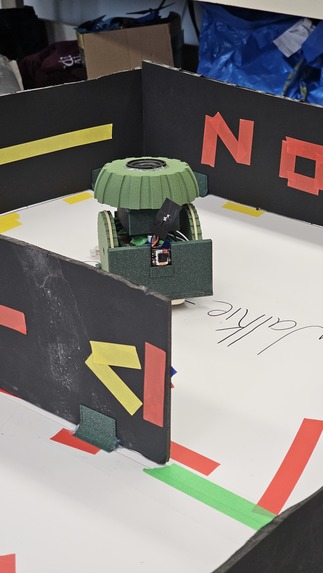
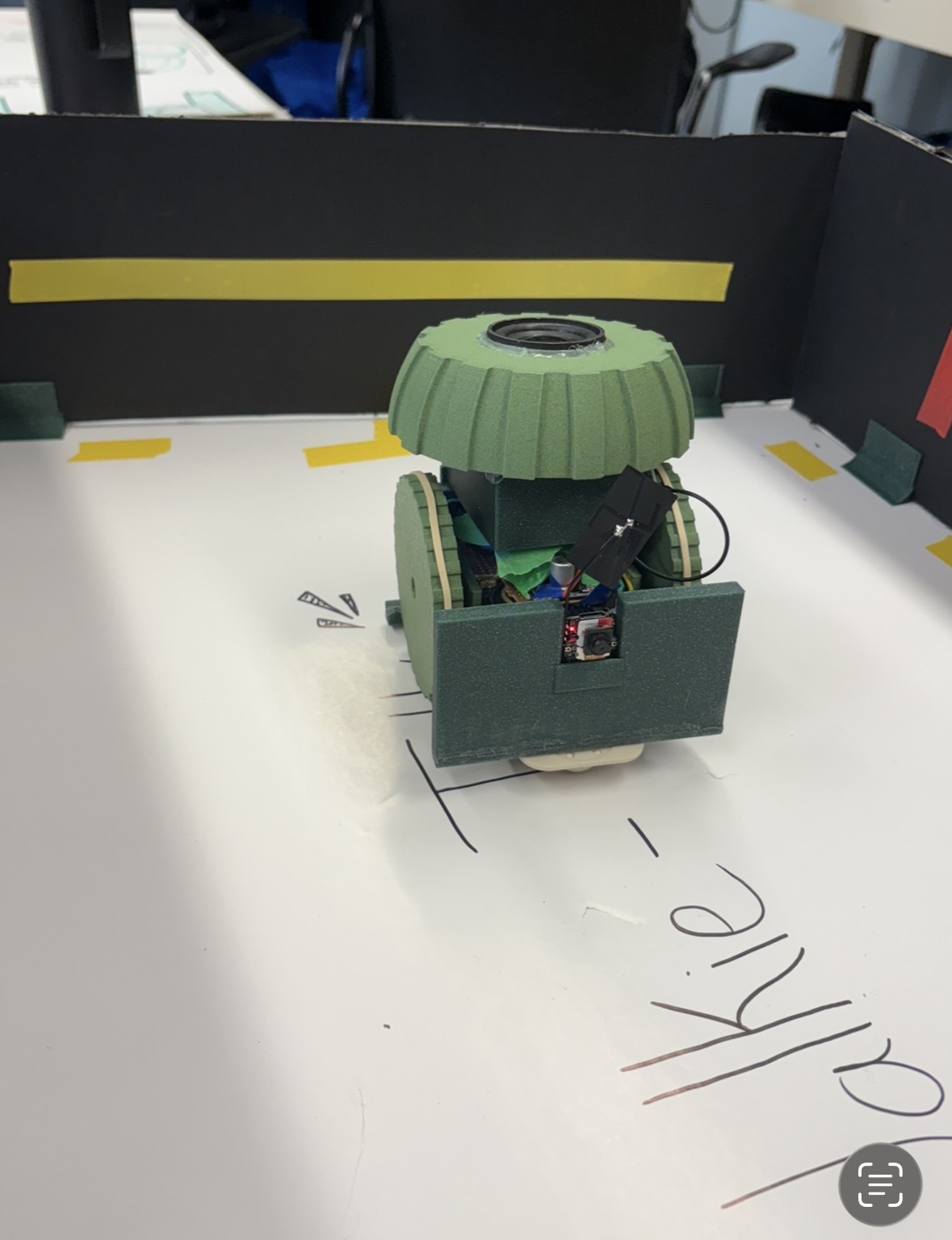
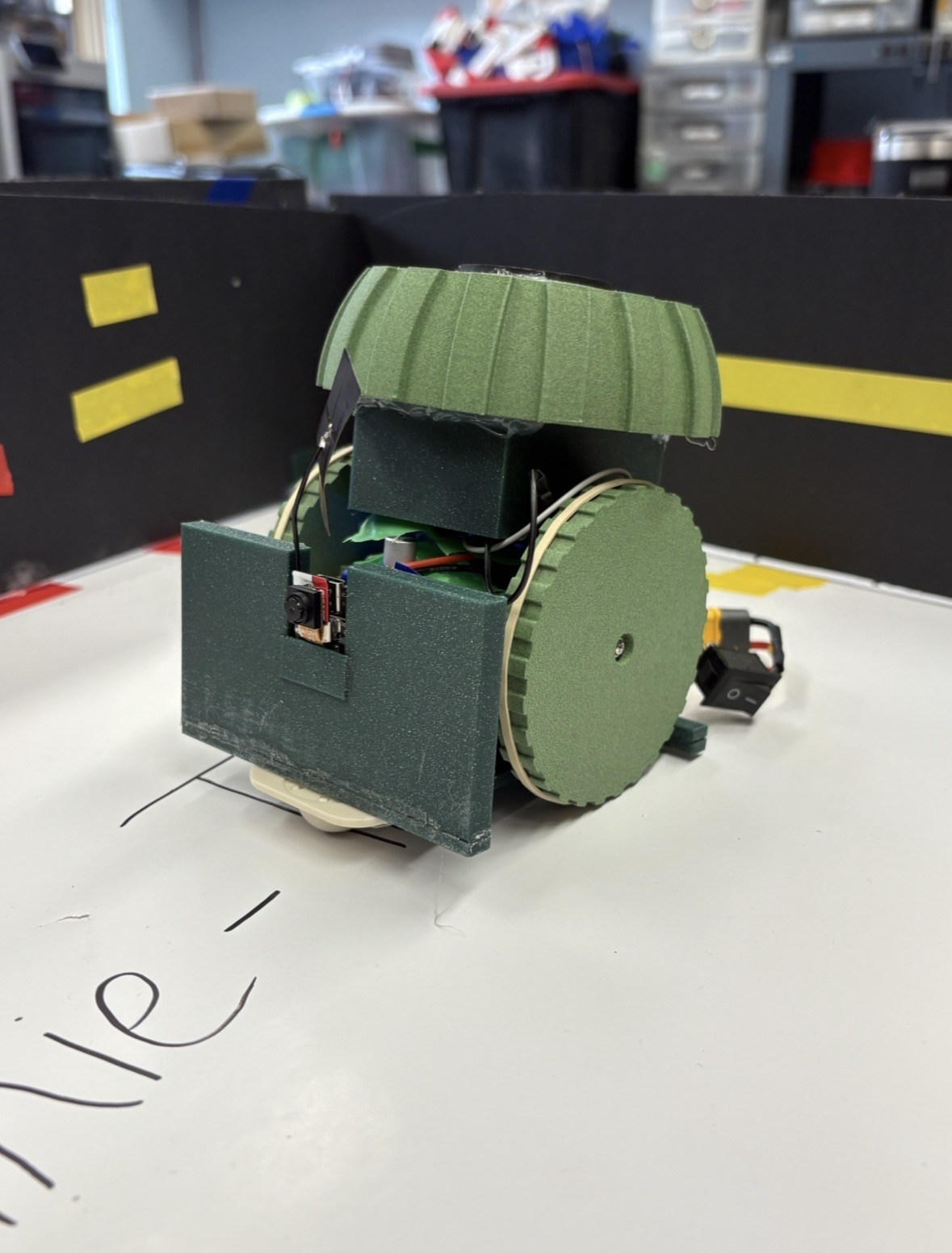
final build1
-
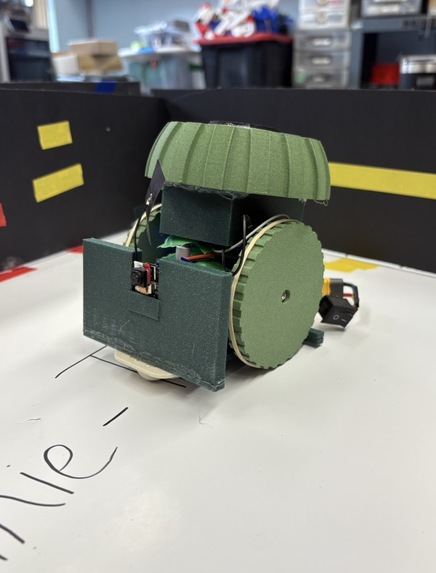
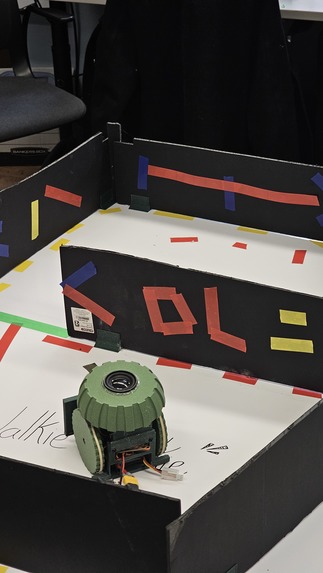
final build2
-
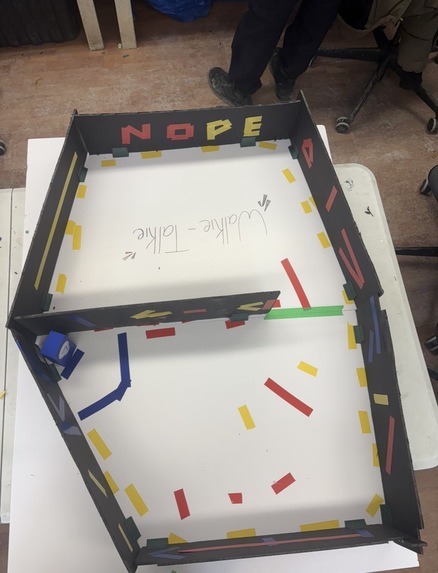
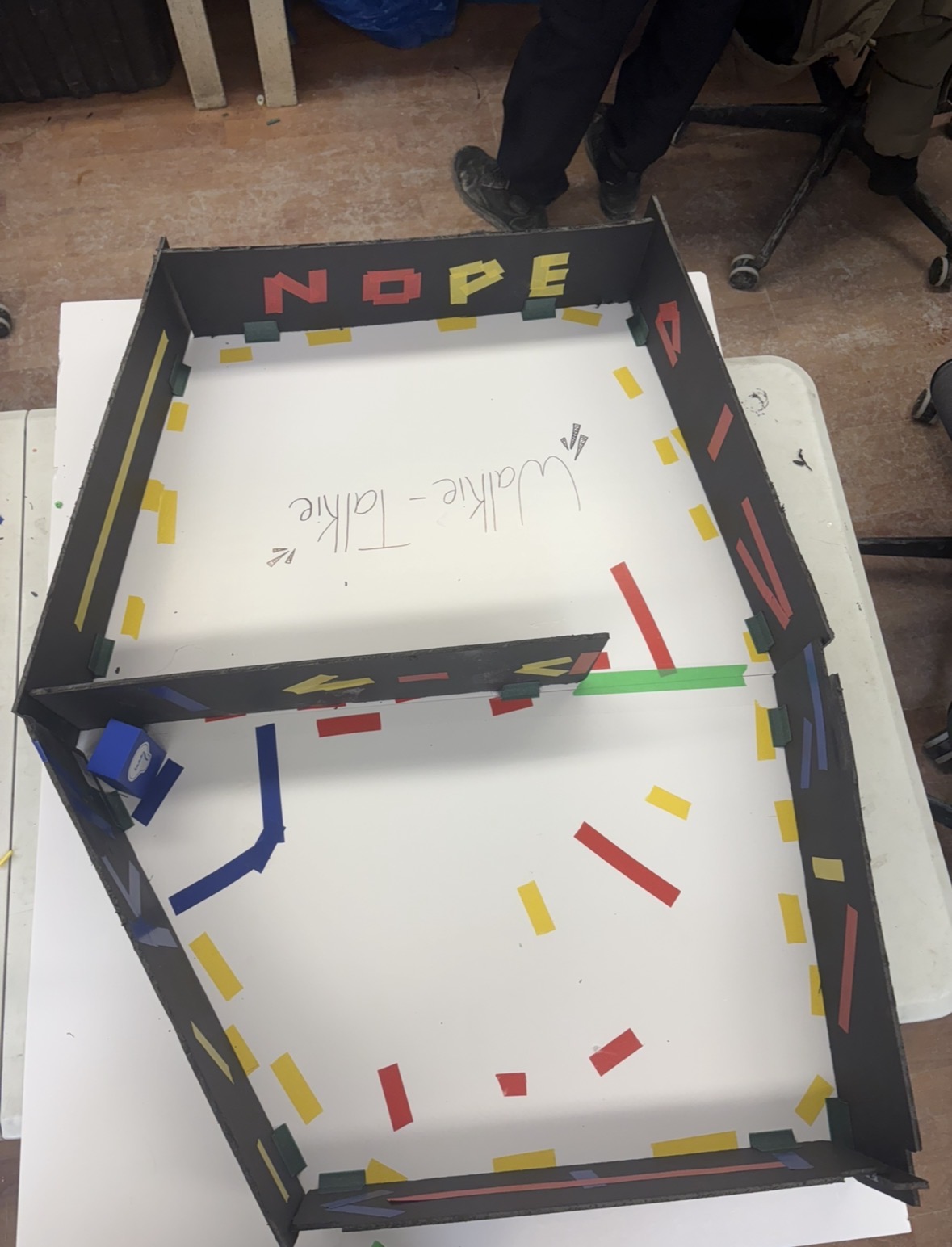
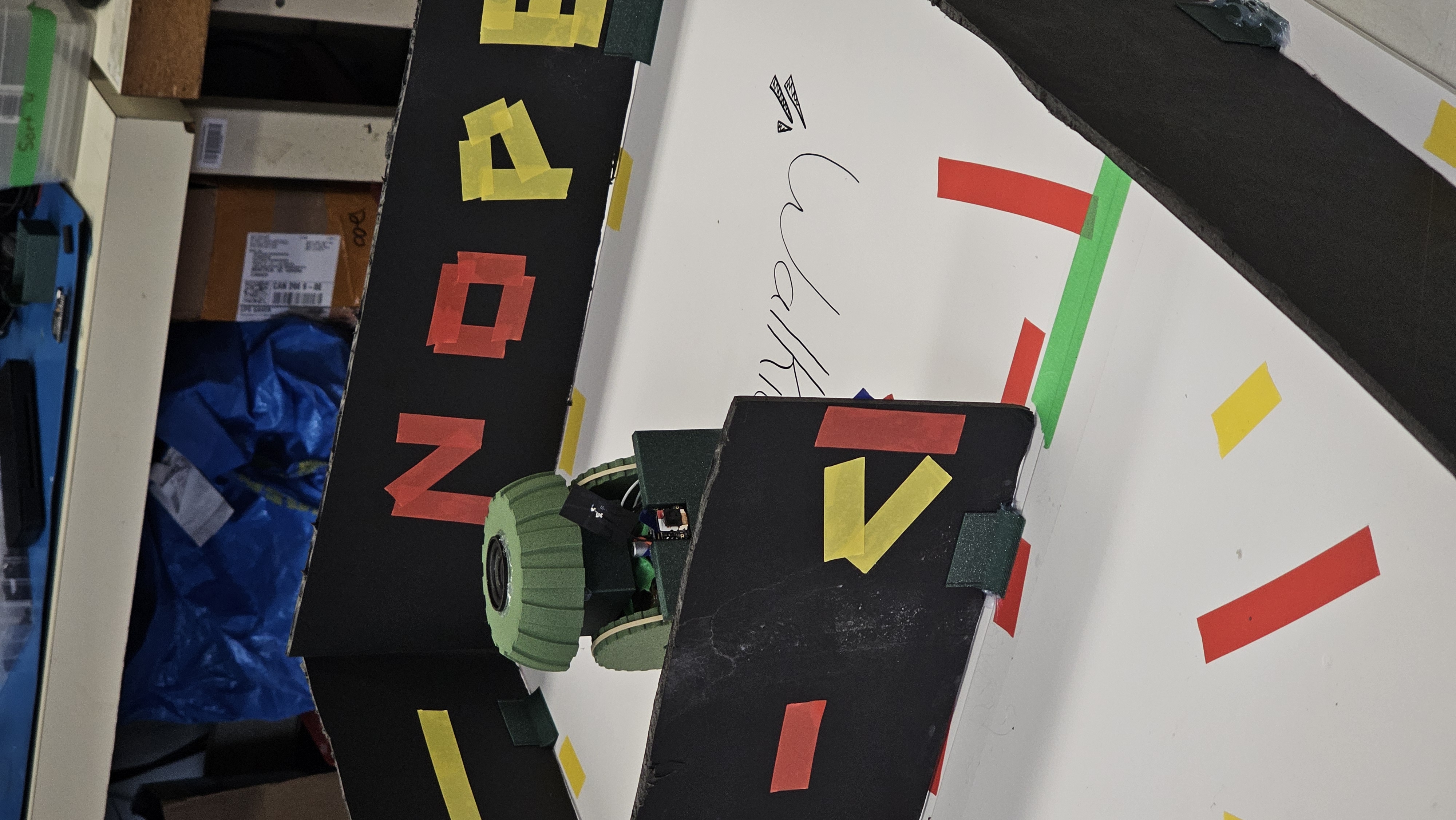
maze build for training
-

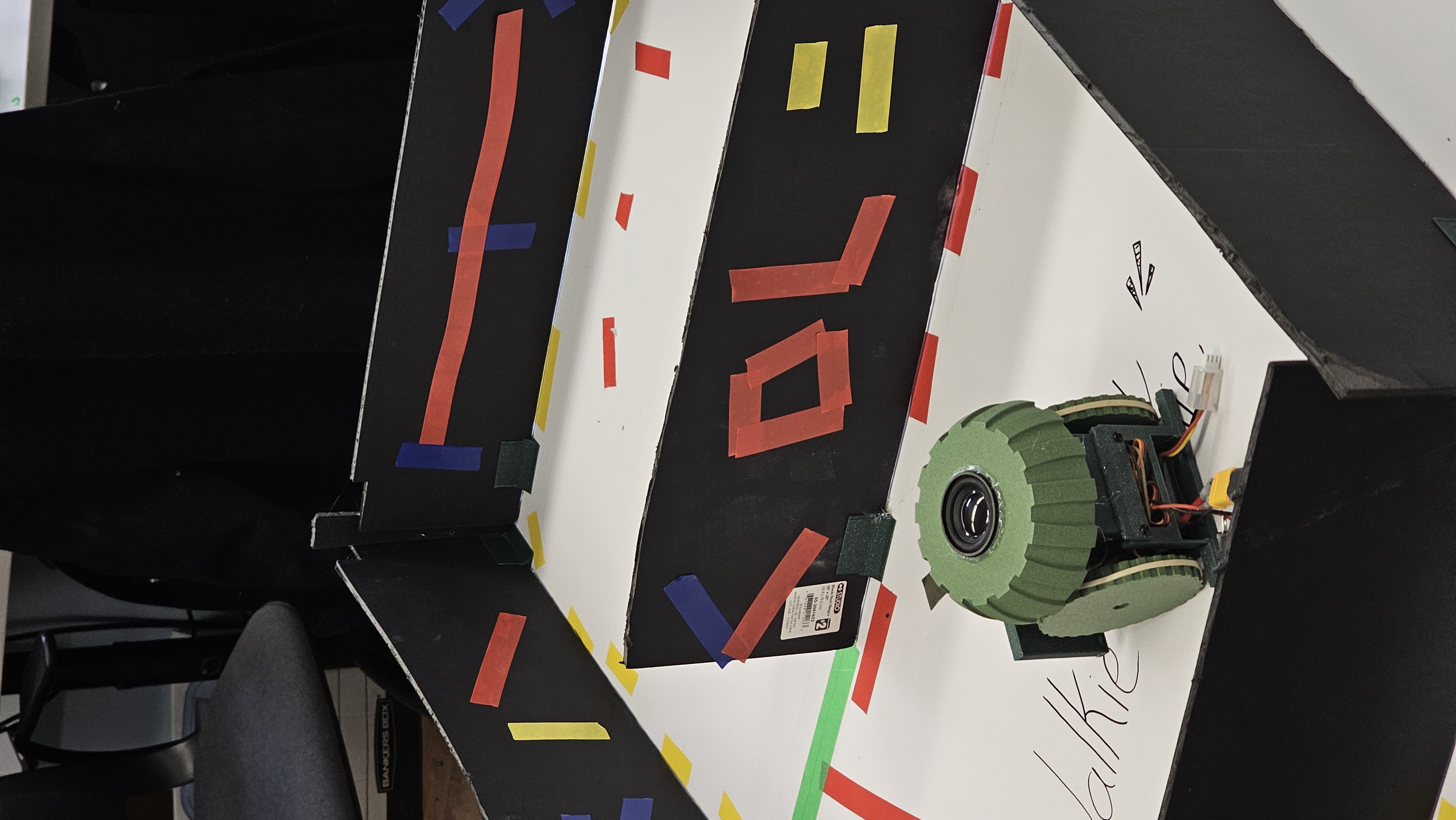
speaker system compact design
-
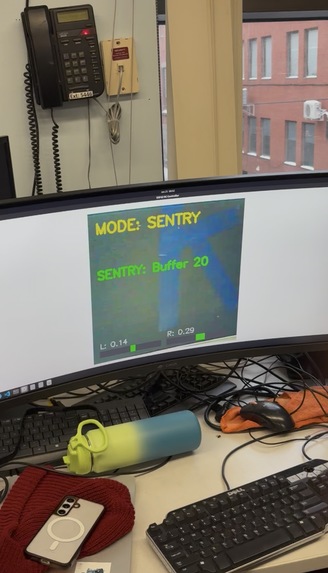
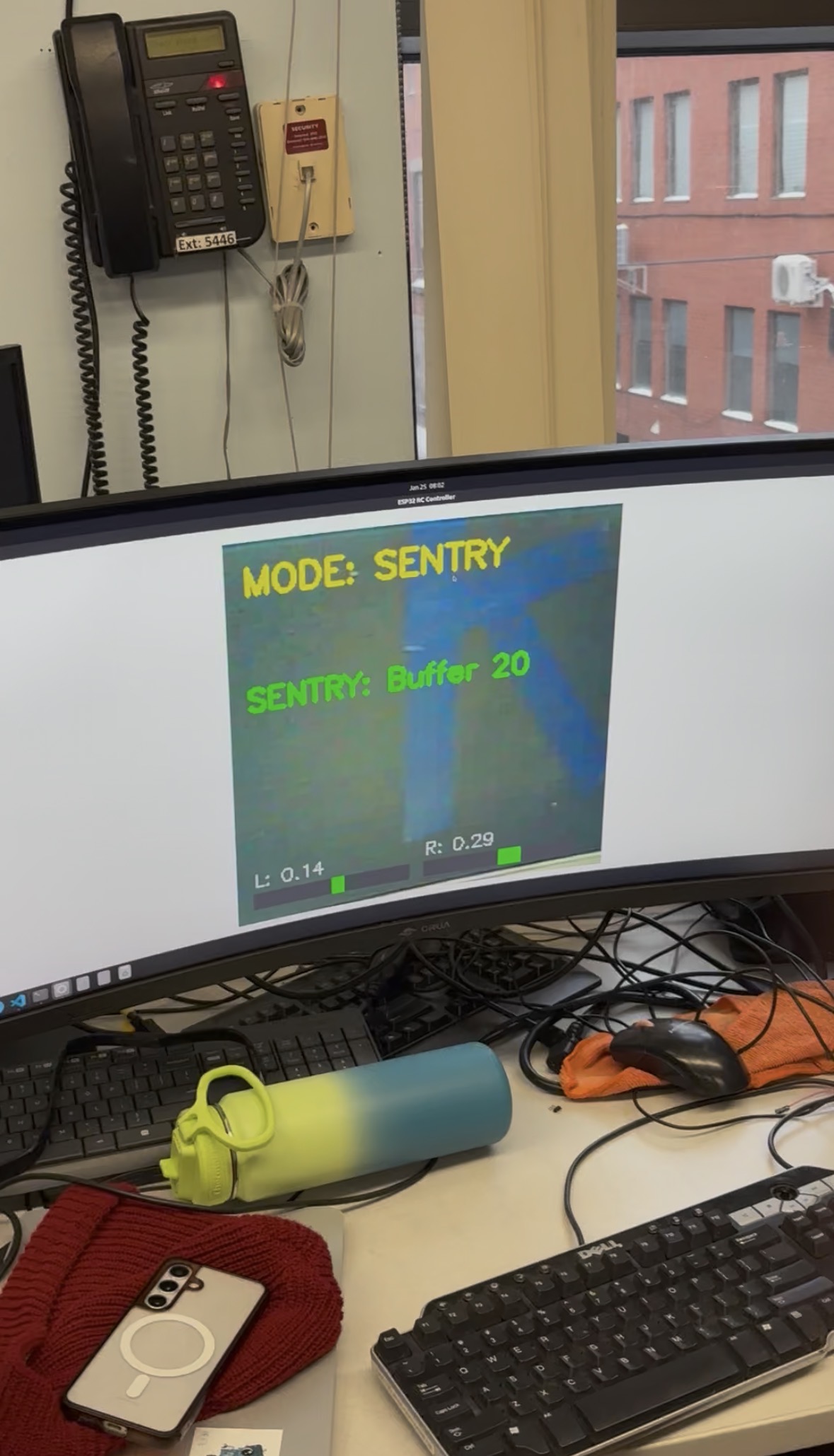
Sentry mode camera view
-
MAZE p1
-
Maze p2
-

Maze p3
-
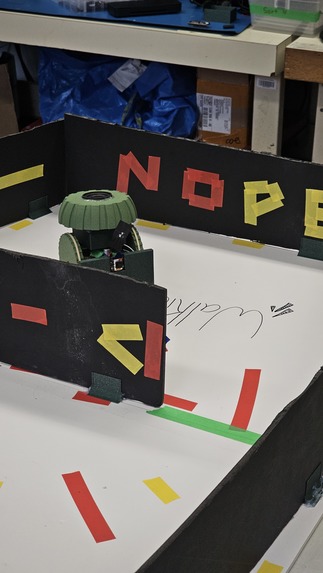
Maze p4



-Inspiration
PETER. A Sentry Robot to secure our house in our absence is a dream, but more importantly, we wanted to showcase what True Full-Stack Robotics looks like.
We were inspired by the challenge of bridging the gap of Physical Ai and hardcore electronics. We combined raw electrical engineering with high-level computer vision in a single 24-hour sprint. All to showcase our Proof of concept of a our Sentry Robot PETER.
-What it does
PETER is a 2-wheel mobile robot equipped with a camera, a custom speaker system, and a predictive AI brain. It operates in three distinct modes:
-> Teleoperation Mode: Full manual control via our Python app, recording input and camera flow in real-time.
-> Gesture Control: The robot identifies and physically follows your index finger using computer vision.
-> Sentry Mode : The robot navigates autonomously. It uses a custom trained AI model to predict the environment's state up to 1 second in the future to overcome camera transmission lag and was trained using real collected data.
Bonus Feature: It features a custom-soldered speaker system that gives PETER a distinct personality -> specifically, he sounds exactly like an idling diesel car.
-How we built it
We divided the work into three layers: Hardware, Electronics, and Intelligence.
(Hardware): We CADed the chassis from scratch to fit our specific components found arround the electronics zone and 3D printed the body.
(Electronics): instead of using a pre-made audio module (coz we didnt have any), we designed and soldered our own Operational Amplifier (Op-Amp) circuit to drive the speaker ( we found a random chip and proceeded to have 10h of straight elec debugging) .
We used an ESP32s3-Sense for the vision and control system.
(AI & Software): We built a Python application via UDP and a Local network for the Realtime video feed.
Model Architecture: We utilized a ResNet architecture. We started with pretrained weights on geometric forms (Transfer Learning) and then fine-tuned the model on a custom dataset we collected during the hackathon by moving the robot in the Maze.
-Challenges we ran into
The Latency Gap: Streaming video over Wi-Fi introduced a lag that made real-time control impossible at high speeds. This forced us to develop the model with "Future Prediction".
The "Diesel" Audio: Building a custom Op-Amp from scratch with a randomly found chip was hard. Our first iteration introduced significant signal noise, which is how PETER accidentally acquired his signature "diesel engine" purr. It's a feature tho.
An endless nightware of Hardware and software integration of feature.
-Accomplishments that we're proud of
Reliable Remote control with video stream and data collection pipeline. Custom Op-amp circuit for a speaker Custom Cads
-What we learned
AI implementation on physical robot is the coolest thing to see.
Hardware never stops being a nightmare






Log in or sign up for Devpost to join the conversation.