Inspiration
Two thousand students on campus experience WiFi dead zones almost daily, especially during peak hours or in lecture halls with poor access point placement. During my internship at AT&T, I saw a teammate create an RF heatmap tool that visualized connectivity shadows in real environments, and it completely reshaped how I thought of network problems as spatial problems. Later, at Letta, I worked on AI agents and watched someone train a Unitree robot in MuJoCo using MCP commands. That sparked the idea: instead of static routers, why not deploy mobile robots that physically move to fix signal gaps?
What it does
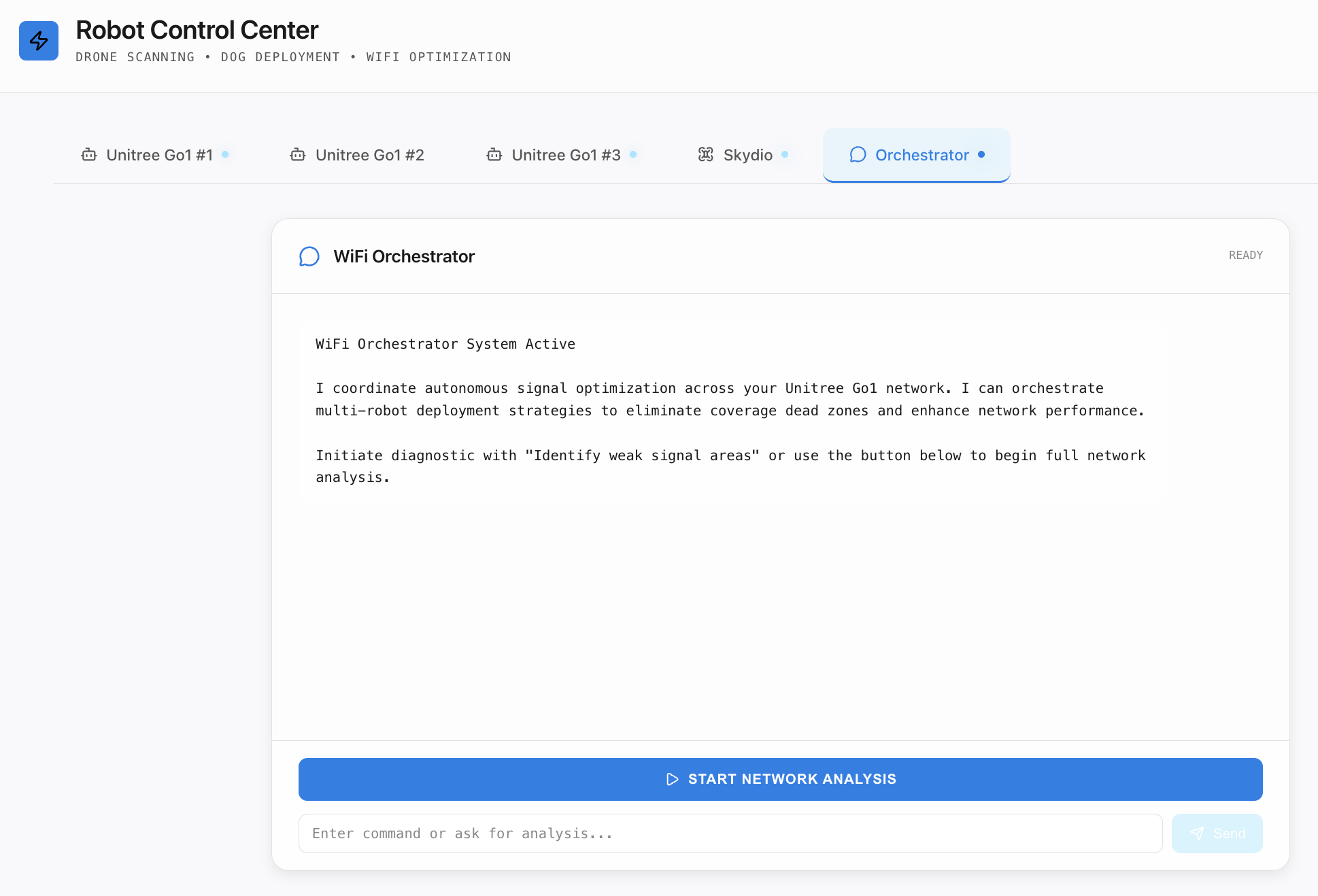
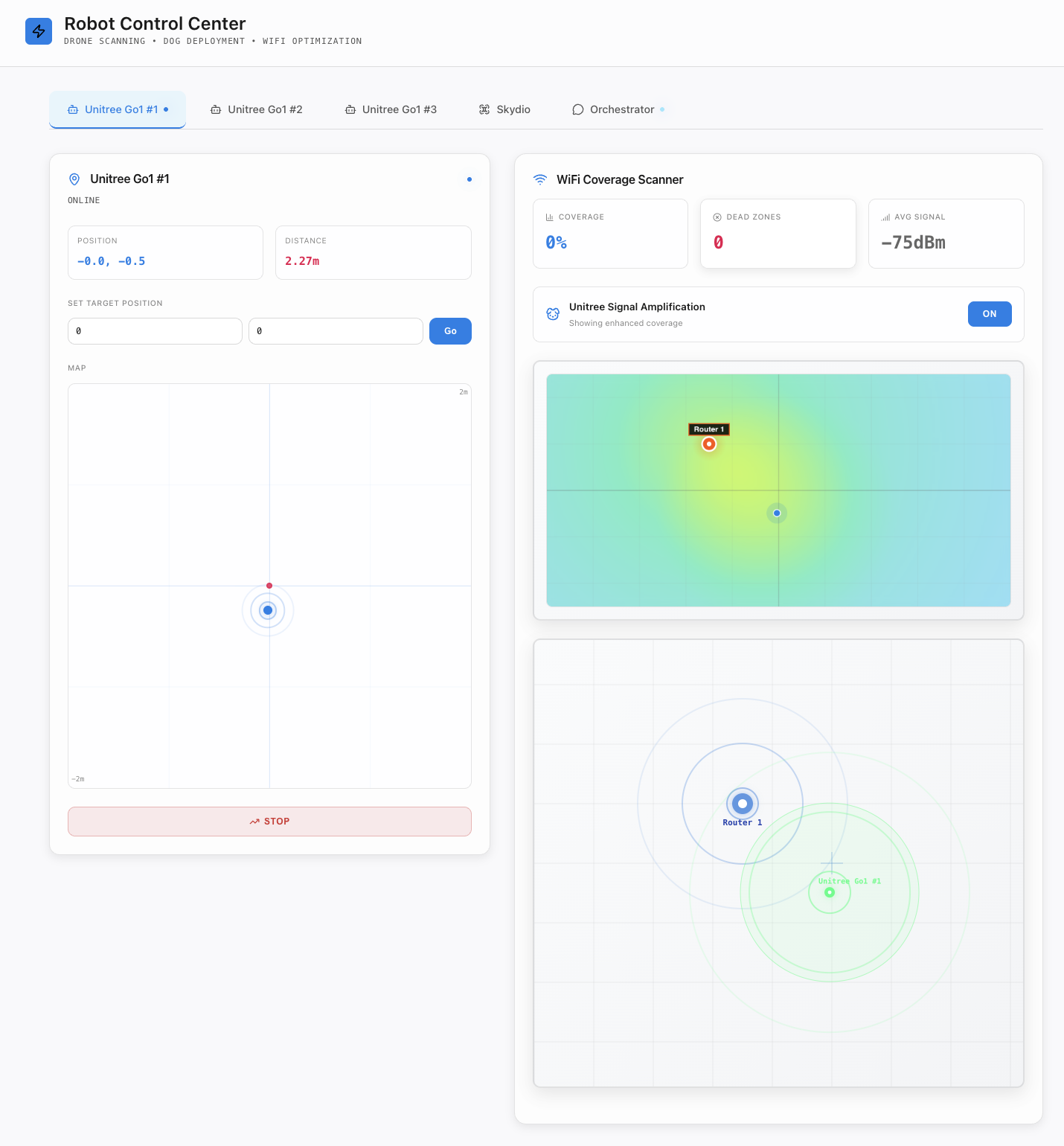
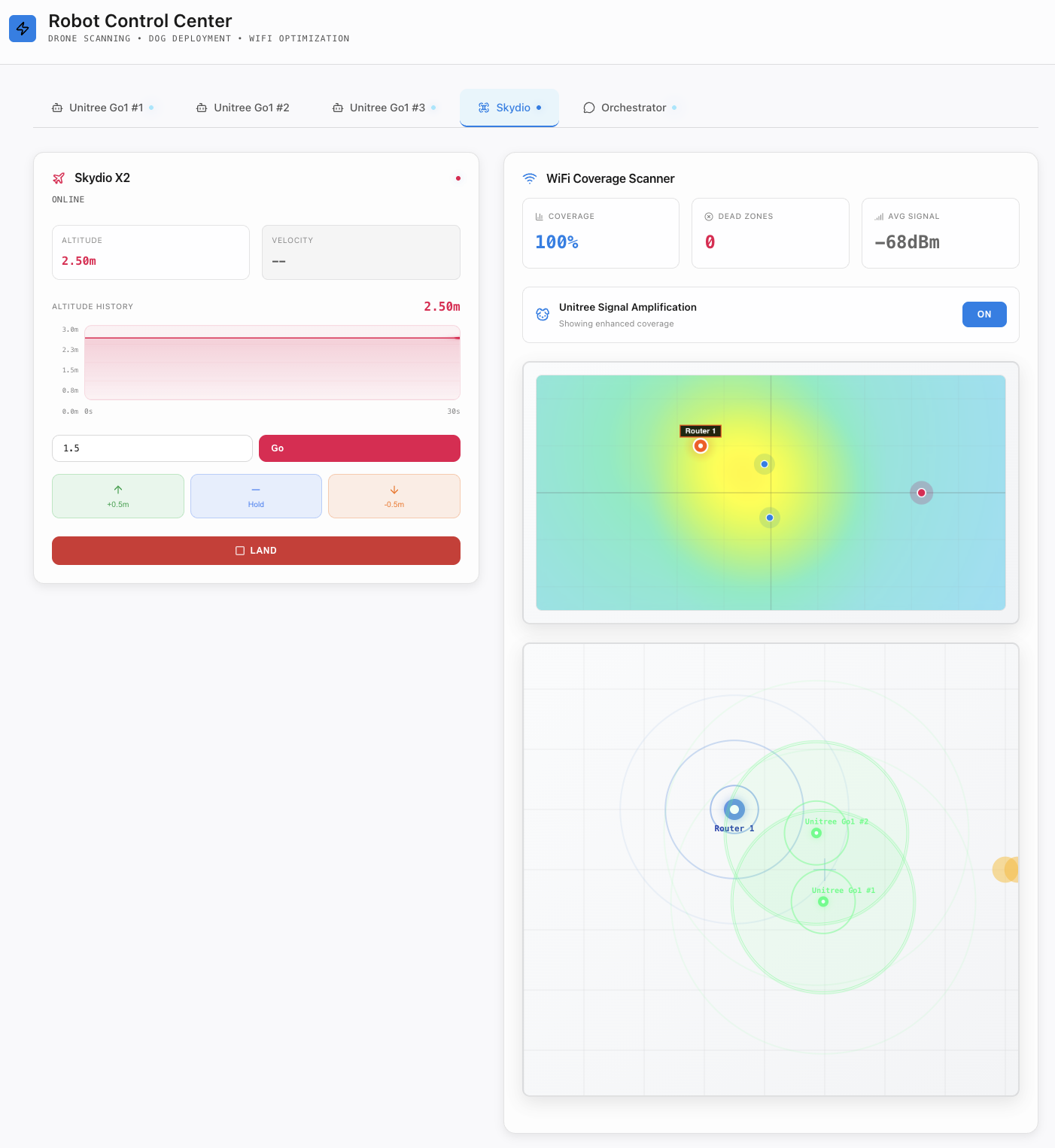
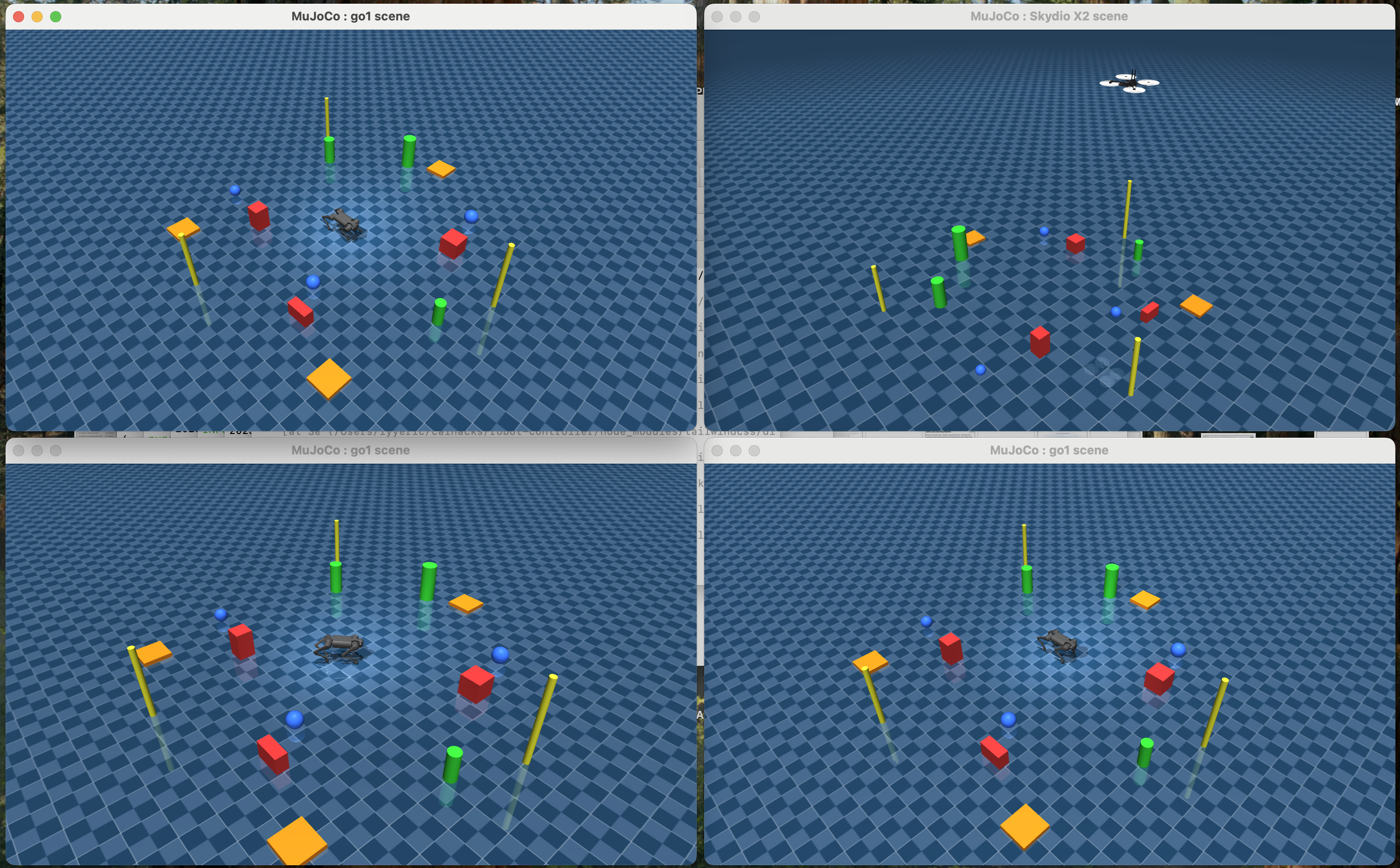
PAWS is an autonomous swarm of simulated Unitree Go1 robots and an aerial drone that maps WiFi signal strength, identifies weak zones, and repositions itself to enhance coverage. A drone collects real-time RF data, an AI orchestrator analyzes it, and the robots are deployed to optimal positions to act as mobile signal relays. Signal coverage improves from 68 percent to 98.6 percent in the simulated environment.
How we built it
Drone and robots simulated using MuJoCo physics Unitree dogs trained with PPO for balancing and locomotion; real-time movement handled using an MPC controller RF mapping uses a path loss model with live RSSI calculations across a grid Frontend built in React with Zustand state management and Konva.js for interactive heatmaps Backend Python APIs for each robot and the drone, exposing /status, /goto, and /stop endpoints AI Orchestrator workflow: scan → map → analyze → deploy → report
Challenges we ran into
- Balancing realism and simulation speed in MuJoCo and RF propagation
- Combining reinforcement learning policies with deterministic MPC path planning
- Getting multiple robots to avoid collisions and operate asynchronously
- Visualizing real-time signal propagation and robot movement without overloading the browser
- Simulating realistic WiFi loss and amplification rather than hard-coded values
Accomplishments that we're proud of
- End-to-end autonomous workflow: from RF scan to robot deployment without manual intervention
- Achieved simulated signal coverage increase from 68 percent to 98.6 percent and an average +16.4 dBm boost
- Built a fully interactive front-end control center with live telemetry, heatmaps, and AI orchestrator chat
- Integrated MuJoCo physics, PPO training, MPC control, and network simulation in a single system
What we learned
- How to bridge AI control systems, robotics simulation, and wireless communication engineering
- Practical tradeoffs between reinforcement learning vs model-predictive control for locomotion
- RF propagation is highly affected by geometry, multipath fading, and placement—not just router power
- Orchestrating multiple robots isn’t just about movement, it’s about bandwidth, timing, and network topology
What's next for PAWS – Perceptive Autonomous WiFi Swarm
- Deploy on real Unitree Go1 hardware with Nvidia Jetson and OpenWRT or portable routers
- Add swarm intelligence where robots reposition dynamically as people move
- Multi-band optimization (2.4 GHz, 5 GHz, 6 GHz) and power efficiency tracking
- Integration with emergency systems for disaster recovery communication
Use machine learning to predict signal dead zones before they form


Log in or sign up for Devpost to join the conversation.