Inspiration
What it does
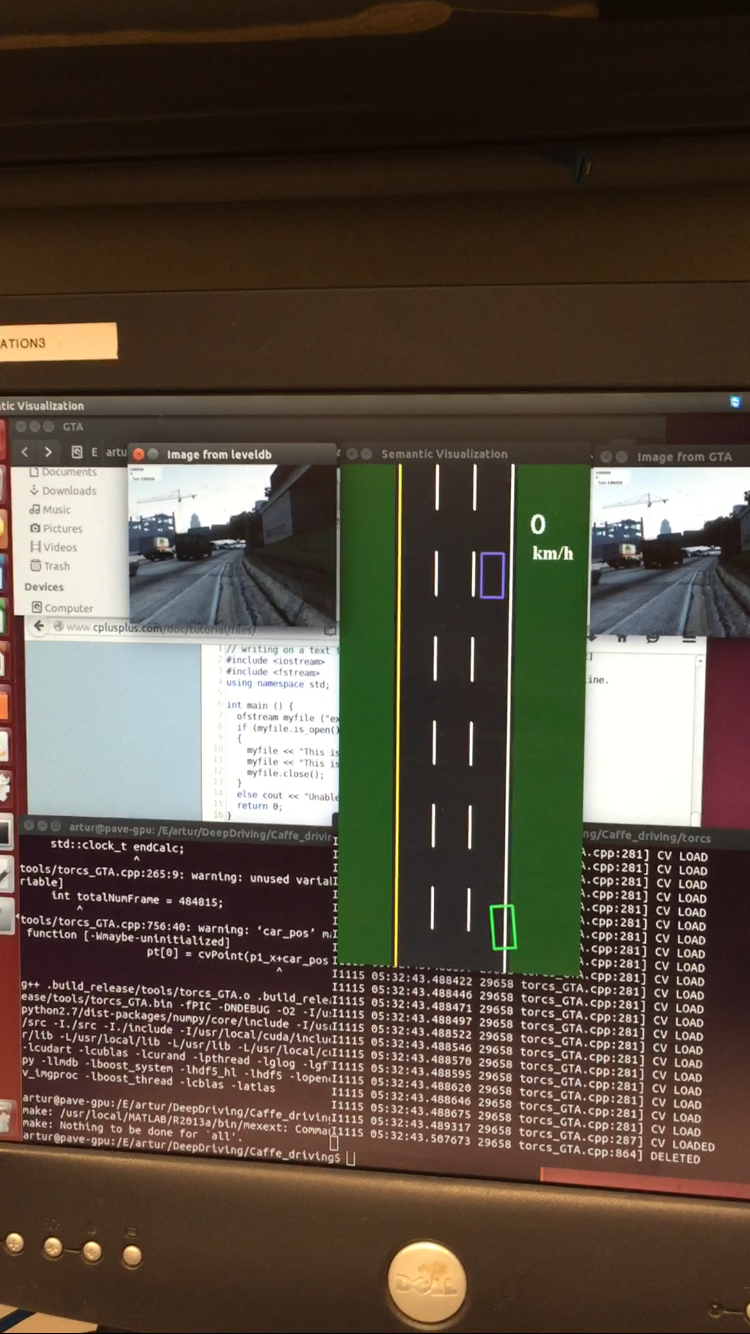
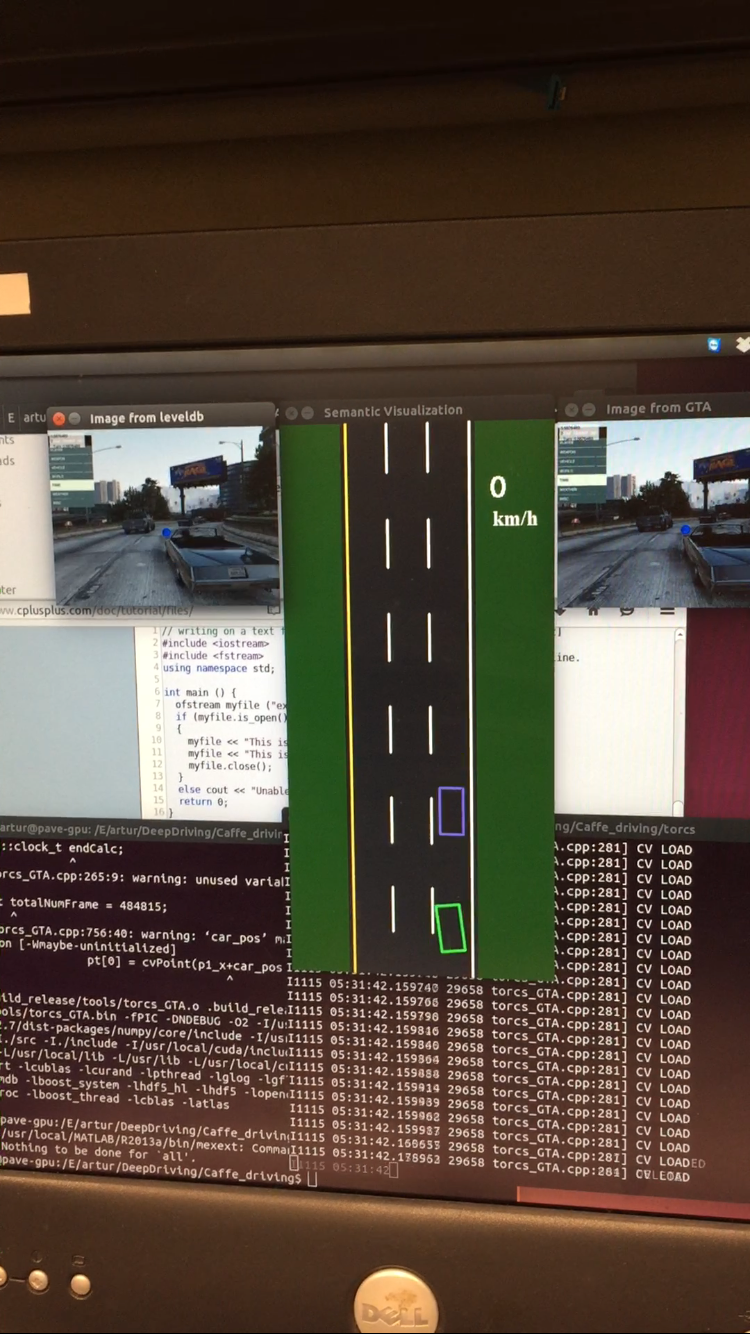
We leveraged existing code for a CNN that detects lane lines and approaching cars in the TORCS video game. TORCS has much more primitive graphics than GTA, so we wanted to see how the network trained on primitive graphics would perform in an incredibly realistic environment.
How I built it
We Googled a lot of our problems, as well repeated error-and-trial and debugging.
Challenges I ran into
Most of the issues were interfacing GTAV, which only runs in windows, with the CNN code, which only runs on Linux. Windows by default only updates folders shared over tcp/ip every second, which is too big a delay for a network that needs to respond to the road in real time. We had to change elements in the Microsoft registry to remove the delay.
Accomplishments that I'm proud of
What I learned
TCP/IP, C++
What's next for PAVE GTAV Lane Detection
Testing in different road environments in GTA 5 and with different weather conditions. We'd also like to work on detecting stop signs, pedestrians, or other objects on the road. Another option is training on GTA images instead of from TORCS, or testing this with real-world images.
We wish to thank Chenyi Chan, NVIDIA, and Rockstar Games.

Log in or sign up for Devpost to join the conversation.