Inspiration
In disaster situations, responders often facing risk of having destructive place. Roads may be blocked, areas flooded, or infrastructure damaged, but maps don’t reflect these changes in real time. This forces teams to make critical decisions blindly. We wanted to build a system that helps responders predict the risks and avoid them. Therefore, responders can work.
What it does
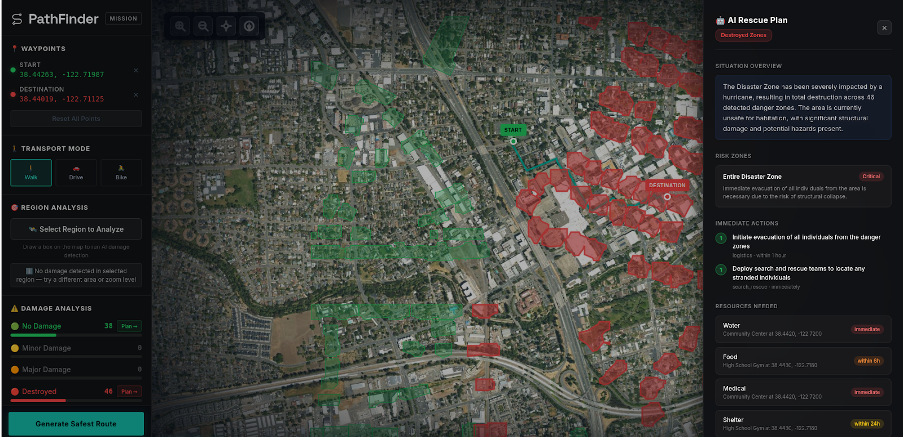
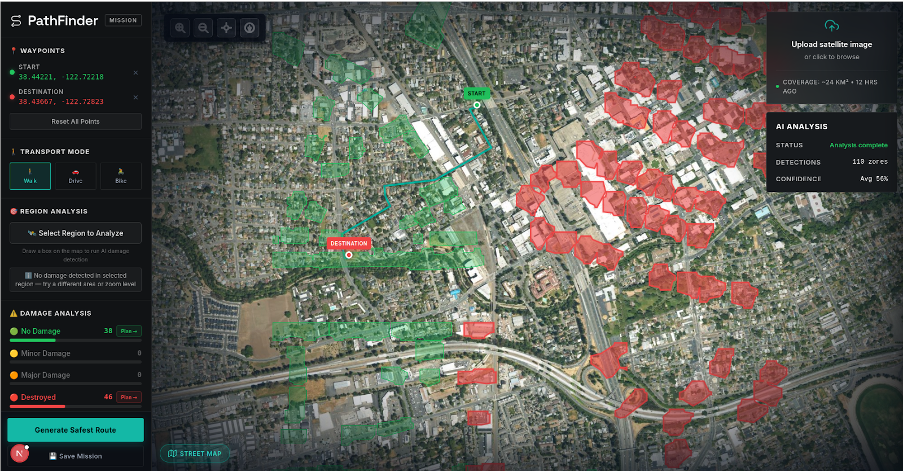
PathFinder is a disaster navigation system that uses satellite imagery and object detection to detect hazardous areas and generate and optimize safer routes. Users can upload satellite images, visualize detected danger zones, and plan routes that actively avoid high-risk regions. The goal is to provide clear, visual decision support for NGOs and field responders.
How we built it
We built PathFinder as a full-stack system. The frontend uses Next.js and MapLibre to create an interactive map interface with satellite imagery and overlays. The backend processes uploaded images using a YOLO-based detection model to identify hazards. These detections are converted into geospatial zones, which are then used by a routing engine to compute safer paths.
Challenges we ran into
One major challenge was integrating different components. For example, satellite imagery, object detection AI, and routing into a cohesive system within a limited time. Aligning coordinate systems between image detections and map overlays required careful handling. We also faced issues with environment setup, dependency management, and ensuring smooth communication between frontend and backend services.
Accomplishments that we're proud of
We successfully built an end-to-end system that connects satellite image with high visual interface is intuitive and allows users to interact with complex data in a simple way. Most importantly, we created a tool that gives safe routes to organization.
What we learned
We learned how to integrate AI models into a full-stack application and translate raw detections into meaningful user insights. We also gained experience in geospatial visualization, handling real-time data flows, and designing interfaces for usability under pressure.
What's next for PathFinder
We plan to improve detection accuracy, integrate real-time data sources, and support live updates from the field. Expanding to offline functionality and mobile compatibility will make the system more usable in low-connectivity environments. Ultimately, we aim to collaborate with NGOs to test and refine PathFinder in real-world scenarios.
Built With
- nextjs
- python

Log in or sign up for Devpost to join the conversation.