Inspiration
In recent years, exciting advancements have been made in smart transportation technology with the development of self-driving cars and connected car platforms. However, parking innovation has lagged behind. According to parking scholar Donald Shoup, drivers searching for parking may contribute to over 30% of downtown traffic and inevitably have a significant effect on the flow of human and vehicle traffic within a city. In almost no city is this problem more apparent than in São Paulo. A 2013 EY survey found that in busy areas such as Jardins, 63% of drivers do not find parking spaces. Other problems São Paulo drivers, especially visitors, face include lack of knowledge of parking locations and regulations and car safety concerns.
A technology that can identify the real-time location of open spaces in nearby parking lots would not only save time for drivers, but also reduce São Paulo's traffic congestion and energy waste. With access to real-time space data, parking operators and cities can manage the cost of parking and utilize demand-based pricing to not only capture more value of the spaces but also regulate the number of drivers seeking to park in the area. At a certain price point, more drivers may choose to carpool or take alternate means of transportation, as shown in applications of demand-based pricing in San Francisco. ParkiT data can also provide predictions based on past data for a driver's pre-trip planning to decide when to leave and also where the best place to park would be. Overall, our goal is to collect real-time data to make parking in the 21st century an efficient, pain-free experience.
While many driver parking apps have been created, these rely on external sources of data to provide open space information. What's missing is an affordable, accurate data collection system. Sensor technologies are difficult to install and maintain, requiring 1 sensor for each space at $400-800 each. While some camera-based detection companies exist, these rely on the installation of company-specific cameras and usually only work accurately in indoor garages. For example, we've communicated with the Park Assist team about potential collaborations at one of our trial locations. While their technology functions well indoors, we are differentiated by our focus on outdoor open spot detection, though our algorithm can work in both indoors and outdoors.
How it works
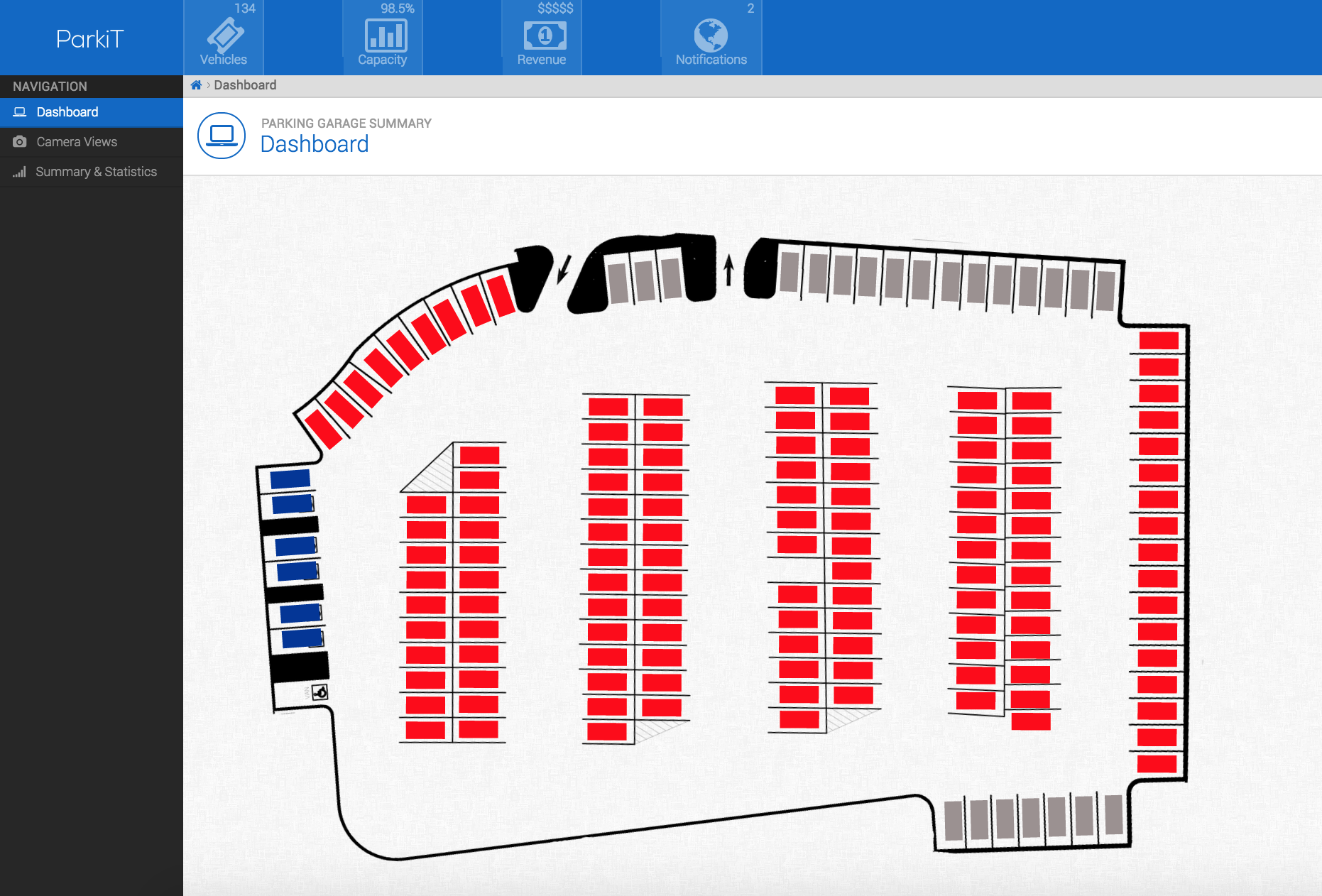
With these challenges in mind, ParkiT has developed a technology that can use existing cameras in parking lots and our computer vision algorithms to accurately identify open spaces, targeting outdoor parking lots. Our system cost is less than $20 per space and over 99% accurate.
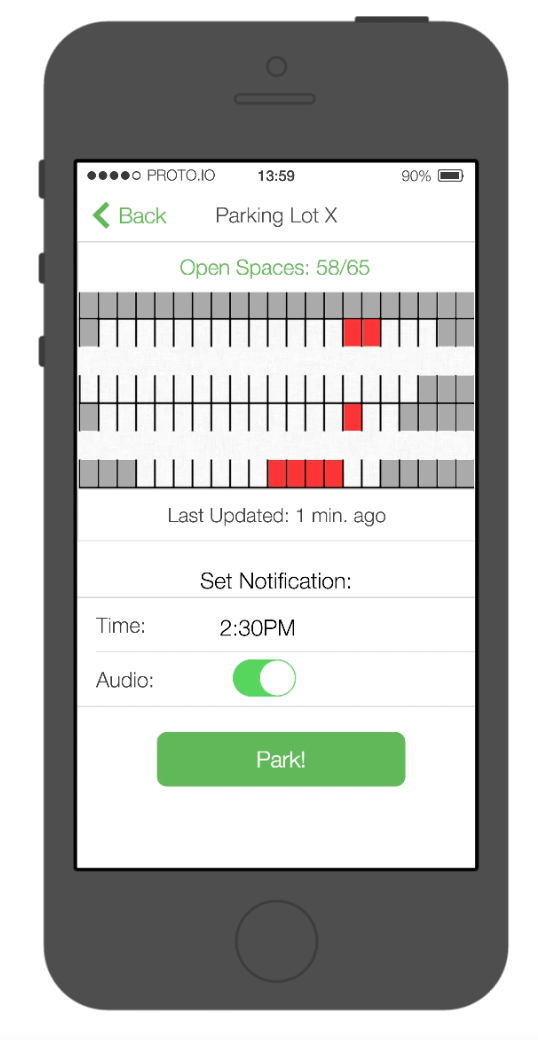
Our system is configured such that cameras send pictures at regular intervals to our server. Our detection algorithm runs on these images to identify open spaces. Finally, the results are displayed on a web dashboard for operators and a mobile app for drivers. We have finished the web dashboard and are developing the mobile app prototype, which will provide open space notifications as well as voice guidance to an area of the lot with open spaces. This system could be beneficial for São Paulo drivers planning a trip to busy locations such as airports and Itaim Bibi. If they need to park their car at a specific location and time, they can check how many spaces are available beforehand to ensure they will have a spot. Additionally, with cameras trained on cars and parking spaces 24/7, ParkiT also offers security monitoring along with open space detection.
Challenges I ran into
We are conducting 3 live pilot programs at the moment with the Texas Medical Center, Rice University, and Houston METRO. We are covering over 130 and 200 spaces, at TMC and Rice respectively, with just one PTZ camera. Our challenges have been organizing and integrating our system architecture with different camera systems and designing a machine learning algorithm architecture that can be robust in changing weather, lighting, and other environmental conditions. This required the acquisition and sorting of tens of thousands of parking images, which was very time-consuming.
Accomplishments that I'm proud of
However, our hard work as paid off in this case. We have recently hit >99% accuracy with our detection algorithm. We’ve also discovered that because we can use existing camera infrastructure, we can reduce or eliminate installation costs for our customers. However, with the installation of a new camera in an outdoor lot, we estimate we can hit <$20 per space. By tackling outdoor lots first, we have solved a big piece of the detection challenge. Because indoor lots have fixed climate and lighting, our algorithm can function effectively indoors as well. Additionally, our trained detection algorithm may be applied to new lots as it has learned what "open" and "occupied" spaces look like in a variety of conditions.
We are proud to have designed an open space detection system that parking lots of different sizes and budgets can afford, and we hope that by reducing the upfront costs we can help make smart parking a reality in our every day lives. Drivers can know exactly where to park and not waste time circling around and parking operators can start applying data analytics to their space management to increase sales, improve the efficiency of the parking process, and even regulate parking demand within a city.
What I learned
Computer vision and machine learning provide valuable tools to improve our daily lives, and we believe our application of these tools for parking can have big impact on the parking, transportation, and vehicle congestion within big cities. Real-time parking data is not only important to improve our everyday lives today but also to feed into the self-driving and self-parking vehicle systems of the future.
What's next for ParkiT
Over the next few months we will continue expanding our technology throughout parking lots Houston. Afterwards, we hope to extend our reach to major cities in the United States and around the world such as São Paulo with major parking and traffic challenges. Our ultimate goal is to eliminate circling time and wasted fuel to help create energy efficient, less congested, road rage-free cities! As we like to say, why drive around in circles when you can just ParkiT?
Built With
- caffe
- css
- django
- html
- javascript
- objective-c
- opencv
- ptz-camera
- swift
- vapix
- xcode


Log in or sign up for Devpost to join the conversation.