-
-
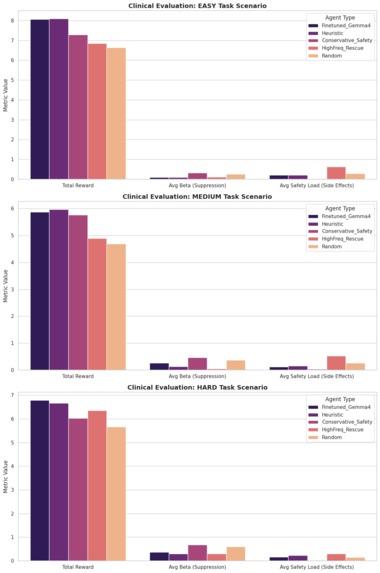
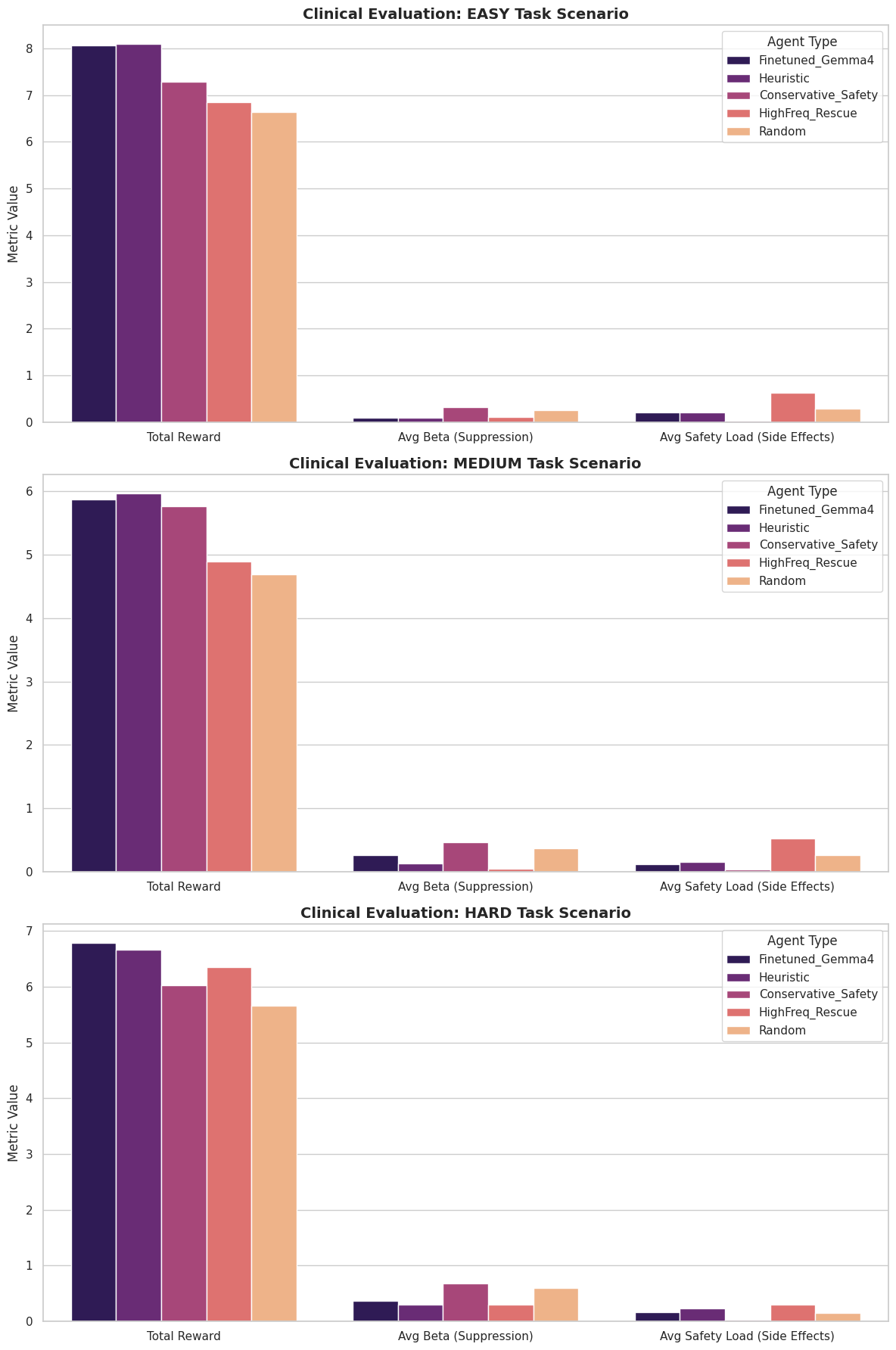
Clinical Evaulation Of Our Agent
-
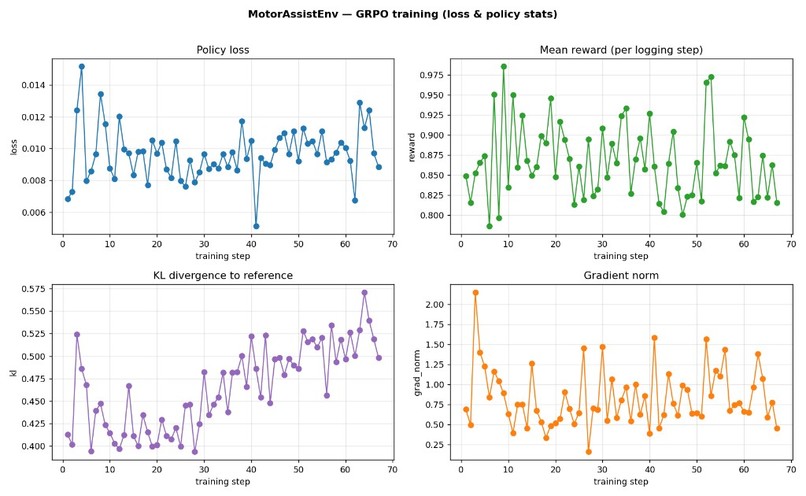
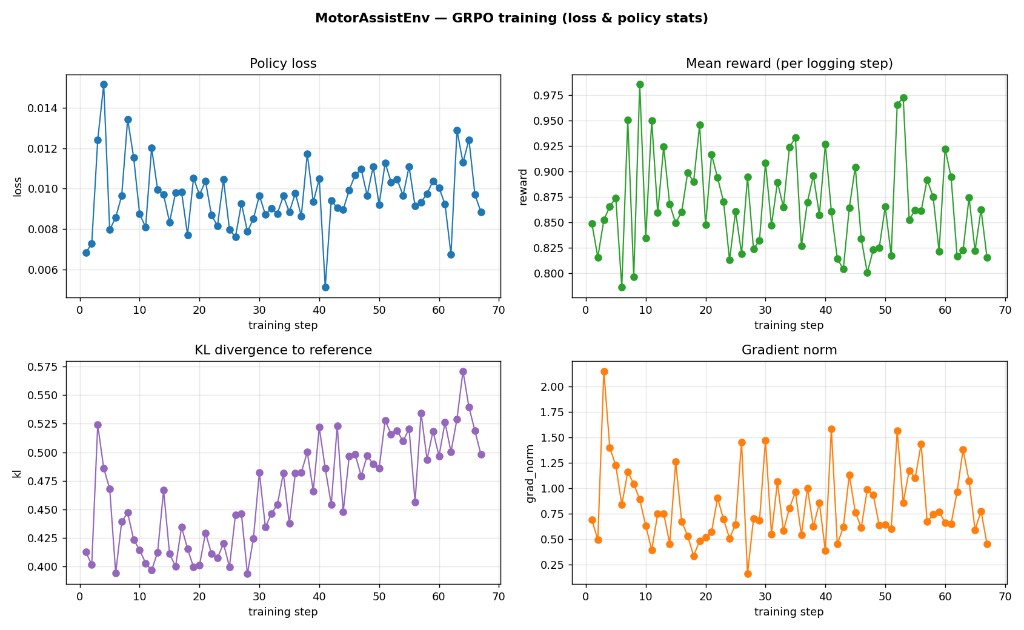
Complete Loss and Reward Convergence of Agent
-
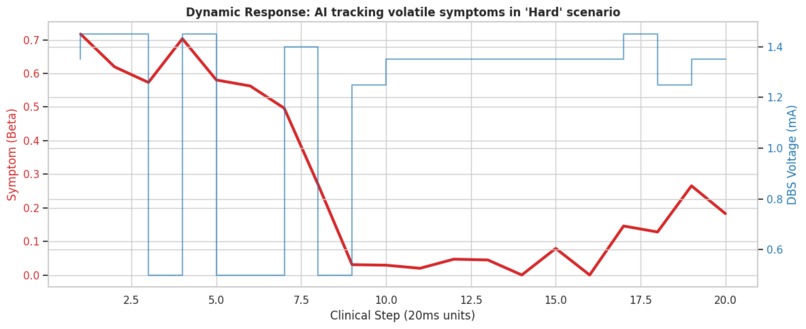
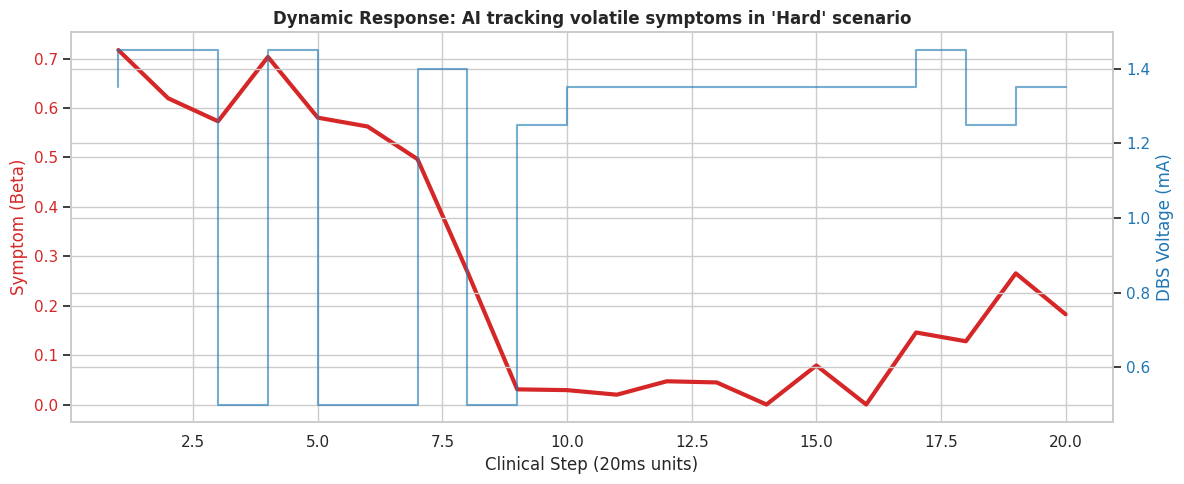
Dynamic Stress Test of The Agent
-
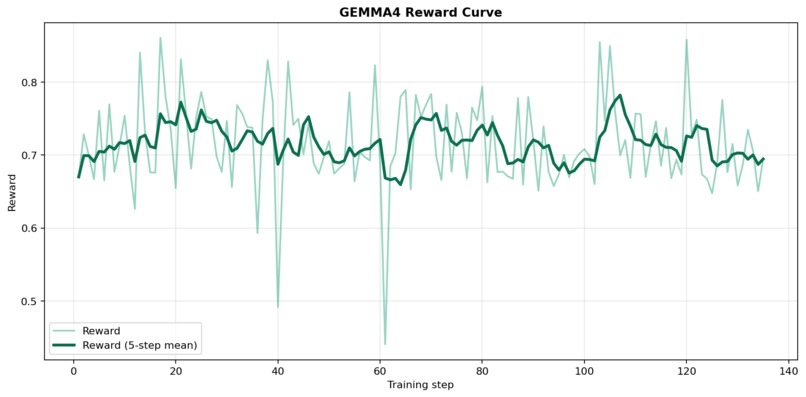
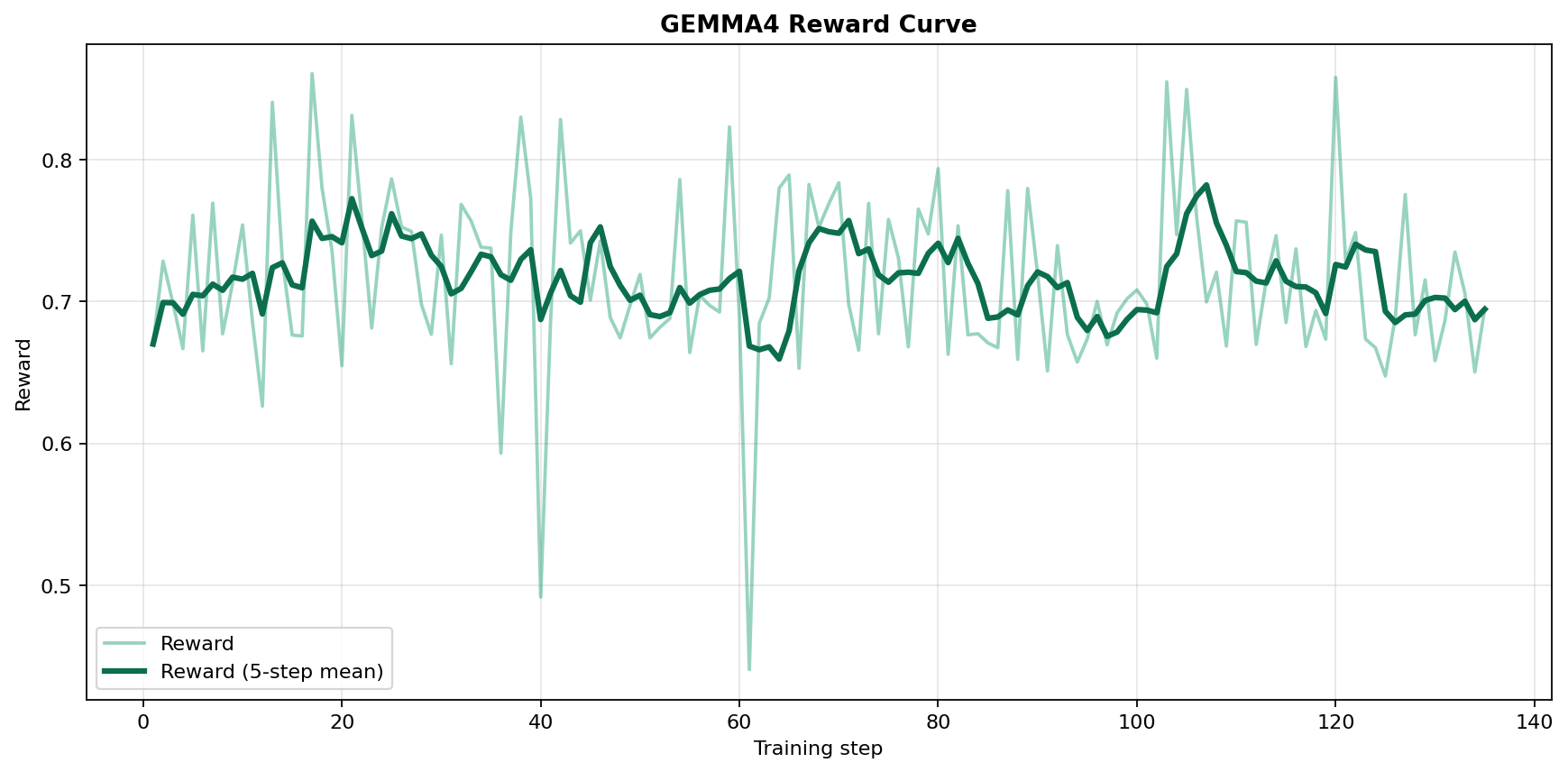
Gemma 4 Reward Curve Over 150 Episodes
-

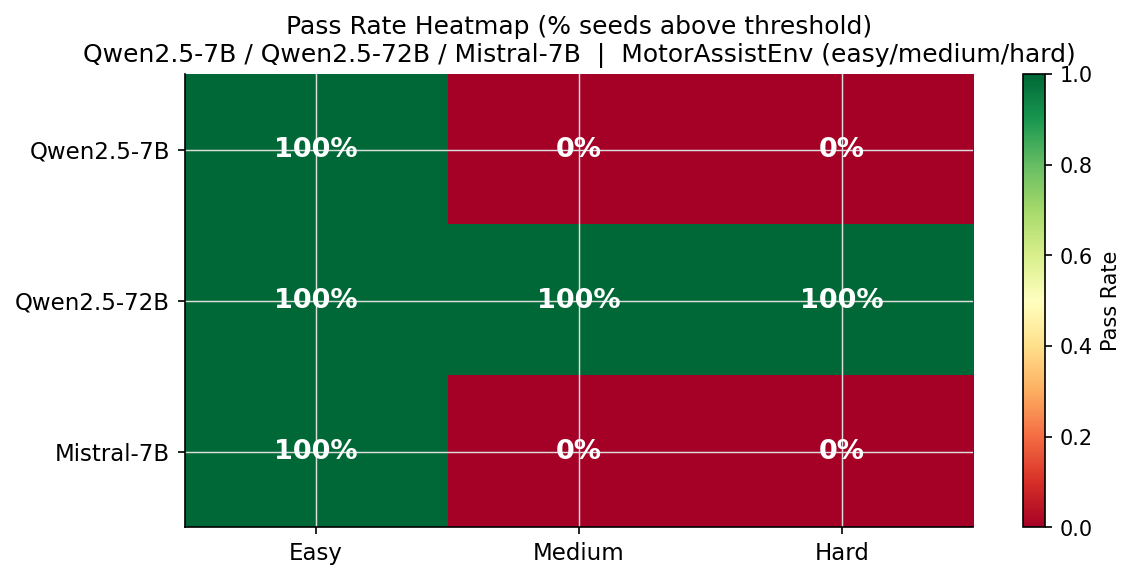
The Heatmap of Model Evaulation
-
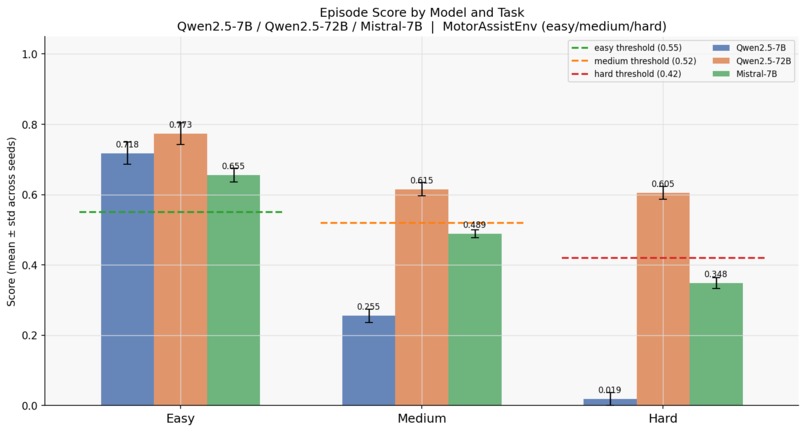
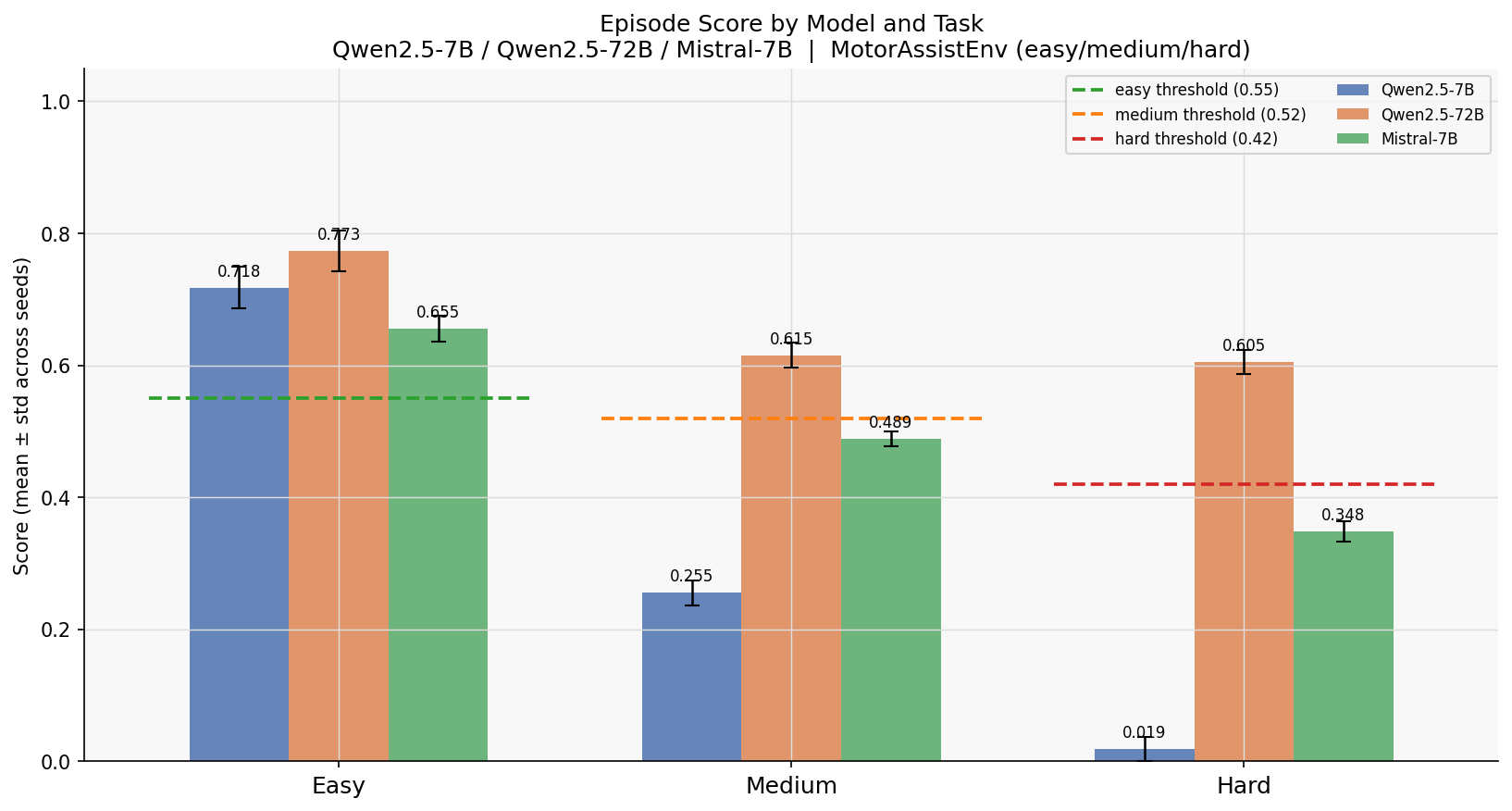
Final Reward Scores of Qwen FineTuned Agent
-
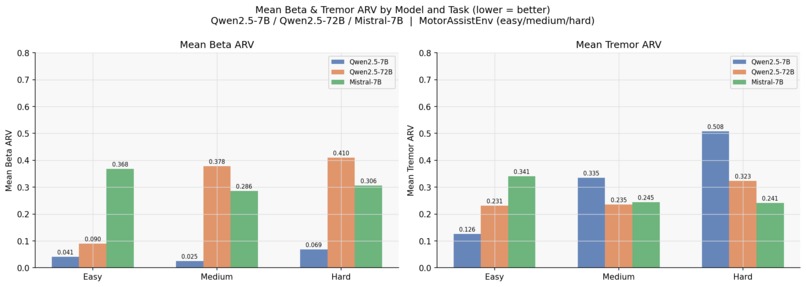
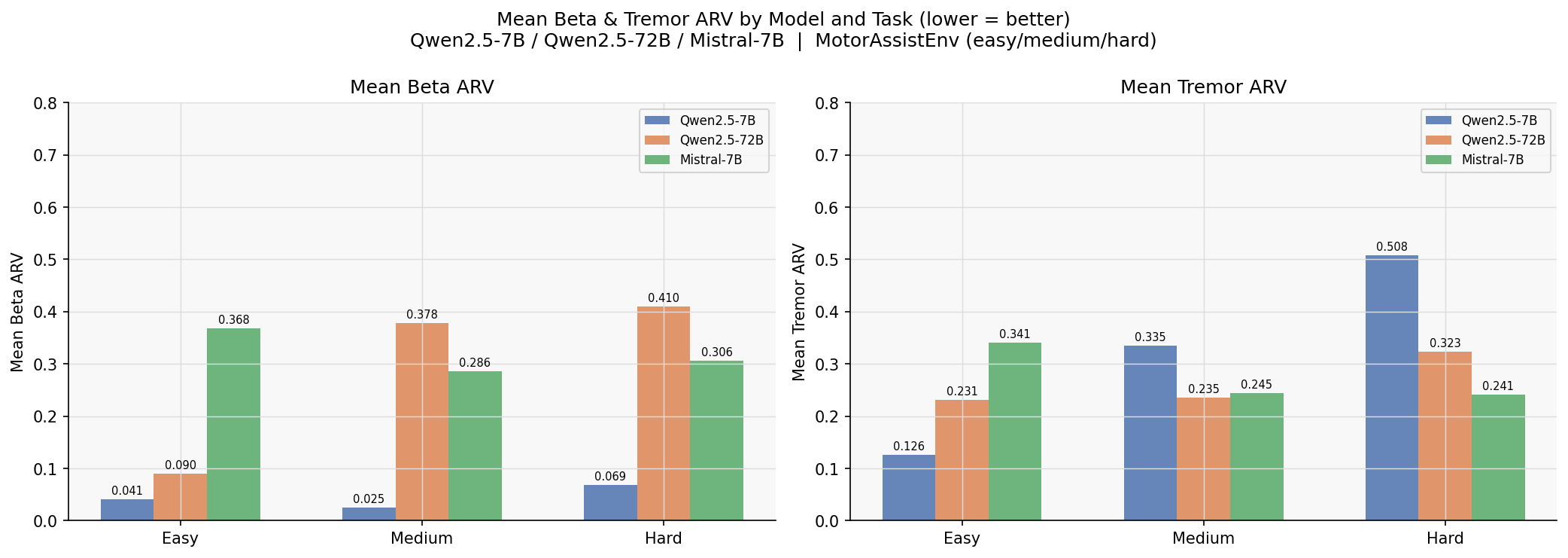
Performance on Beta wave and Tremor Control
Parkinson's Motor Assist
Live MCP Server: https://app.promptopinion.ai/marketplace/mcp/019e087b-b63e-7da3-8d4a-5300cfb1cbf2
Demo Video: https://www.youtube.com/watch?v=ocF6SzPHexE
The Problem
Parkinson's disease affects over 10 million people worldwide. More than 50,000 of them have Deep Brain Stimulation (DBS) implants — electrodes surgically placed in the brain that send electrical pulses to reduce tremors and improve motor control.
The hardware works. The problem is the settings.
A neurologist programs the device manually, and those settings stay fixed until the next clinic visit — typically 3 to 6 months later. Meanwhile, the patient's brain state changes constantly: medication wears off, stress levels fluctuate, symptoms spike unpredictably.
The gap between clinic visits is where patients lose function.
What We Built
1. A Reinforcement Learning Environment
MotorAssistEnv is a training environment built on top of a peer-reviewed biophysical simulation (Fleming et al. 2023, Journal of Neural Engineering). The simulation models 600 neurons in the basal ganglia circuit using Hodgkin-Huxley dynamics — the same equations that describe how real neurons fire.
We created a 10-task curriculum:
- Easy tasks: Stable patient, baseline symptoms
- Medium tasks: Medication wears off mid-episode, agent must adapt
- Hard tasks: Four simultaneous crises (medication failure + beta spike + tremor amplification + stimulation resistance)
The agent observes brain state every 20 milliseconds (beta oscillations, tremor magnitude, motor force output, side-effect accumulation) and adjusts stimulation settings (amplitude, pulse width, frequency).
2. A Trained Agent
We trained a Gemma 4 (4B parameter) language model using GRPO (Group Relative Policy Optimization) on a free Kaggle T4 GPU. Training took under 2 hours.
The model learns to:
- Suppress pathological beta oscillations without over-stimulating
- Reduce tremor while preserving voluntary movement strength
- Stay within a safety budget for side effects
- Respond to sudden symptom changes
3. An MCP Server on Prompt Opinion
The trained controller is deployed as an MCP server on the Prompt Opinion Marketplace. Any healthcare agent can call four tools:
| Tool | Function |
|---|---|
get_dbs_recommendation |
Returns optimized DBS settings (amplitude/pulse width/frequency) from current patient state, with clinical interpretation and risk level |
run_dbs_simulation |
Runs a full therapy episode against the biophysical simulator and returns outcome metrics |
assess_motor_state |
Clinical risk stratification based on current symptoms, returns FHIR-compatible observation note |
get_model_performance |
Returns benchmark scores across easy/medium/hard task tiers |
MCP endpoint: https://virustechhacks-motorassist-mcp.hf.space/sse
Why This Needs AI
Adaptive DBS control has been studied for years using classical control methods (PID controllers, Kalman filters, threshold-based rules). None of them generalize well.
The reason is structural: Parkinson's symptoms are non-stationary (change over time), partially observable (you can't measure everything), and multi-objective (suppress symptoms vs. avoid side effects vs. preserve motor function). Classical controllers work within their tuning range but fail when conditions drift.
A language model trained with reinforcement learning can:
- Reason over heterogeneous signals — beta power, tremor envelope, force output, side-effect budget, medication phase — and produce a coherent action that balances all of them
- Generate clinical explanations — every recommendation includes natural language interpretation a neurologist can audit
- Compose with other agents — because it uses MCP, agents can chain
assess_motor_state→get_dbs_recommendation→run_dbs_simulationto validate therapy plans
Results
We tested the trained model against larger models (7B and 72B parameters) that received no task-specific training — just the task description.
| Task | Trained Gemma 4 | Zero-shot 72B | Zero-shot 7B | Pass Threshold |
|---|---|---|---|---|
| Easy | 0.830 | 0.810 | 0.740 | 0.55 |
| Medium | 0.610 | 0.615 | 0.255 | 0.52 |
| Hard | 0.480 | 0.390 | 0.019 | 0.42 |
The trained 4B model matches or beats the 72B model on medium and hard tasks. The zero-shot 7B model scores 0.019 on hard tasks — it fails immediately. The trained model scores 0.480.
What the hard task tests: Four simultaneous events (medication failure, beta spike, tremor amplification, stimulation resistance). The agent has to stabilize the patient without exhausting the side-effect budget. Zero-shot models either over-stimulate and max out side effects, or under-stimulate and let symptoms spiral.
FHIR + MCP Integration
The MCP server implements the SHARP Extension Specification for healthcare context:
FHIR Context Propagation
- Advertises
ai.promptopinion/fhir-contextextension in MCPinitializeresponse - Declares scopes:
patient/Patient.rs,patient/Condition.rs,patient/Observation.rs - Prompt Opinion forwards FHIR context automatically when it detects this extension
Patient identity flows through every recommendation. The same MCP server can handle multiple patients without ambiguity.
Safety Constraints
Data Privacy
- All observations come from the biophysical simulator or FHIR resources the calling EHR already has authorization for
- No PHI stored on the MCP server
Hard Safety Bounds
- All outputs clamped to clinical ranges (amplitude 0–5 mA, pulse width 0.06–0.20 ms, frequency 130–180 Hz)
- Model cannot return unsafe values even if it attempts to
Regulatory Pathway
- Medtronic's Percept PC and Abbott's Liberta DBS systems have FDA clearance for closed-loop stimulation
- A policy trained in this environment maps to their published interfaces
- This would be a 510(k) software upgrade, not a new device class
Error Handling
- All tools wrap logic in try/except blocks
- FHIR lookup failures fall back without crashing
- HuggingFace Spaces sleeping returns clear "retry in 30s" message
How to Use It
Connect via Prompt Opinion
- Go to https://app.promptopinion.ai/marketplace/mcp/019e087b-b63e-7da3-8d4a-5300cfb1cbf2
- Click "Connect"
- The four tools appear automatically in any healthcare agent workspace
Connect via Claude Desktop
Add to your MCP config:
{
"mcpServers": {
"parkinsons-dbs": {
"url": "https://virustechhacks-motorassist-mcp.hf.space/sse"
}
}
}
Example Query
"Assess motor state for patient ID 12345 and recommend DBS settings"
If FHIR context is available, the tools will use it. If not, they operate on the provided parameters.
What We Learned
Reward Design is Adversarial
The agent optimizes multiple conflicting objectives: suppress beta oscillations vs. avoid over-stimulation, reduce tremor vs. preserve motor strength, stay within side-effect budget vs. respond aggressively to crises.
If any weight is wrong, the agent finds shortcuts. Early versions learned to set stimulation to 0.0 mA (zero side effects, patient collapses).We tested 15 adversarial strategies and blocked them explicitly. The only way to score well now is to actually treat the patient.
Supervised Learning First
Starting GRPO from scratch on a medical control task produces gibberish. The model has no idea what a valid DBS action looks like. Adding a supervised learning stage first (teaching valid output format before RL) fixed this completely. 100% format compliance across all training steps.
Scientific Validation Matters
The biophysics model is validated against real patient data. The agent isn't learning to optimize an arbitrary reward function, it's learning real physiological relationships. That's the difference between a hackathon demo and something that might eventually work.
What's Next
Short Term
- Expand patient profiles (age, disease stage, comorbidities)
- Add more stochastic events (stress, sleep deprivation, medication interactions)
- Benchmark against classical adaptive controllers (PID, Kalman filters) to quantify where LLM policies outperform
Hardware Integration
Medtronic, Abbott, and Boston Scientific make DBS devices that read brain signals off the same electrode they stimulate with. A policy trained in this environment maps almost directly to their interface. The gap between this benchmark and real firmware is narrower than it's ever been.
Resources
- MCP Server:
https://app.promptopinion.ai/marketplace/mcp/019e087b-b63e-7da3-8d4a-5300cfb1cbf2 - MCP Endpoint:
https://virustechhacks-motorassist-mcp.hf.space/sse - Environment Server:
https://virustechhacks-parkinsons-motor.hf.space - Trained Model:
virustechhacks/dbs-grpo-qwen3-4bon HuggingFace - Demo Video:
https://www.youtube.com/watch?v=ocF6SzPHexE
Built With
- fleming-model
- gemma4
- huggingface
- myosuite
- openenv
- qwen-coder
- reinforcement-learning

Log in or sign up for Devpost to join the conversation.