-
-
-
-
-
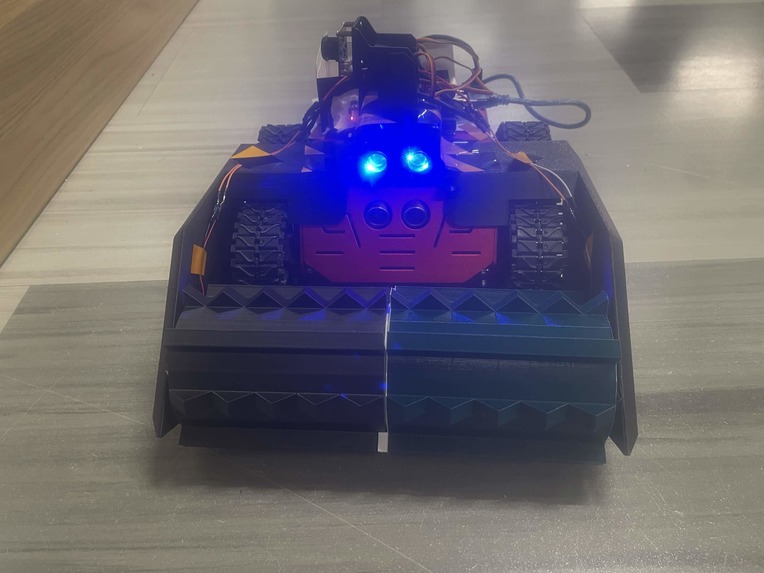
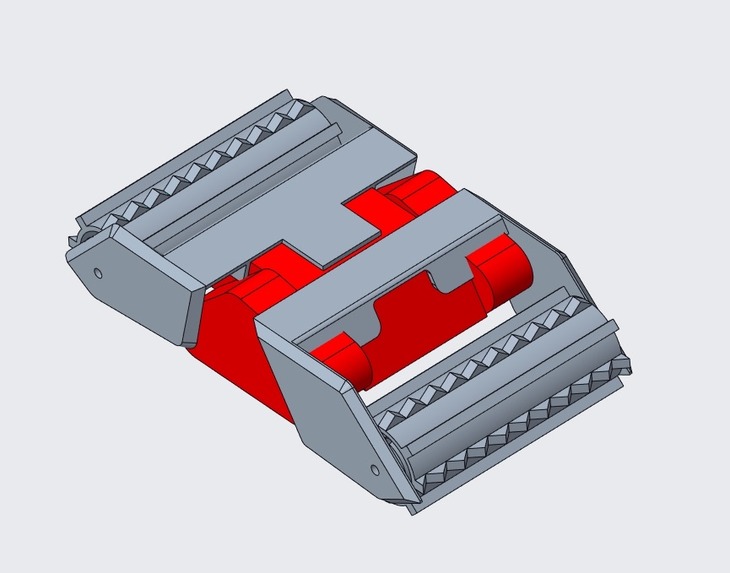
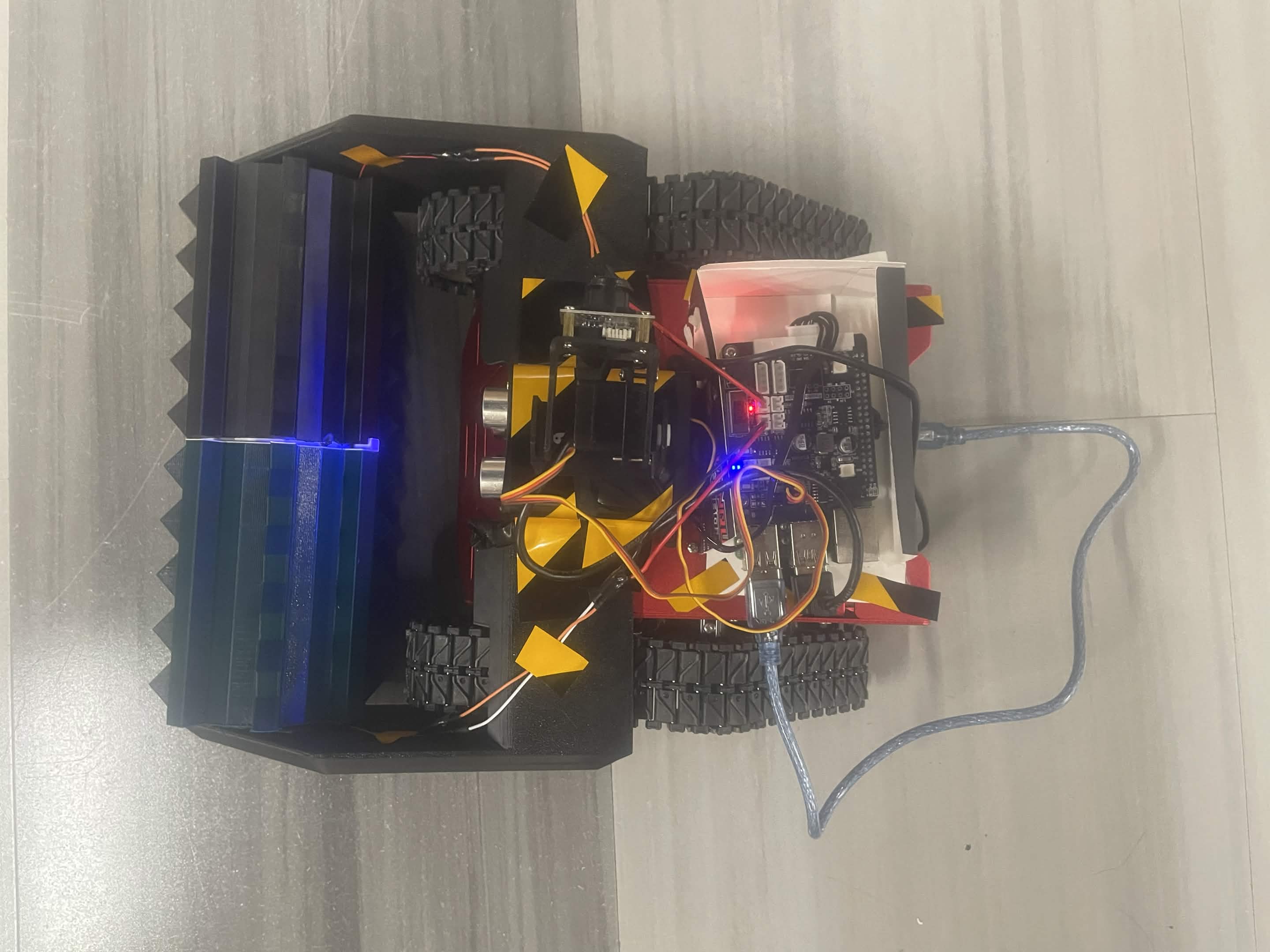
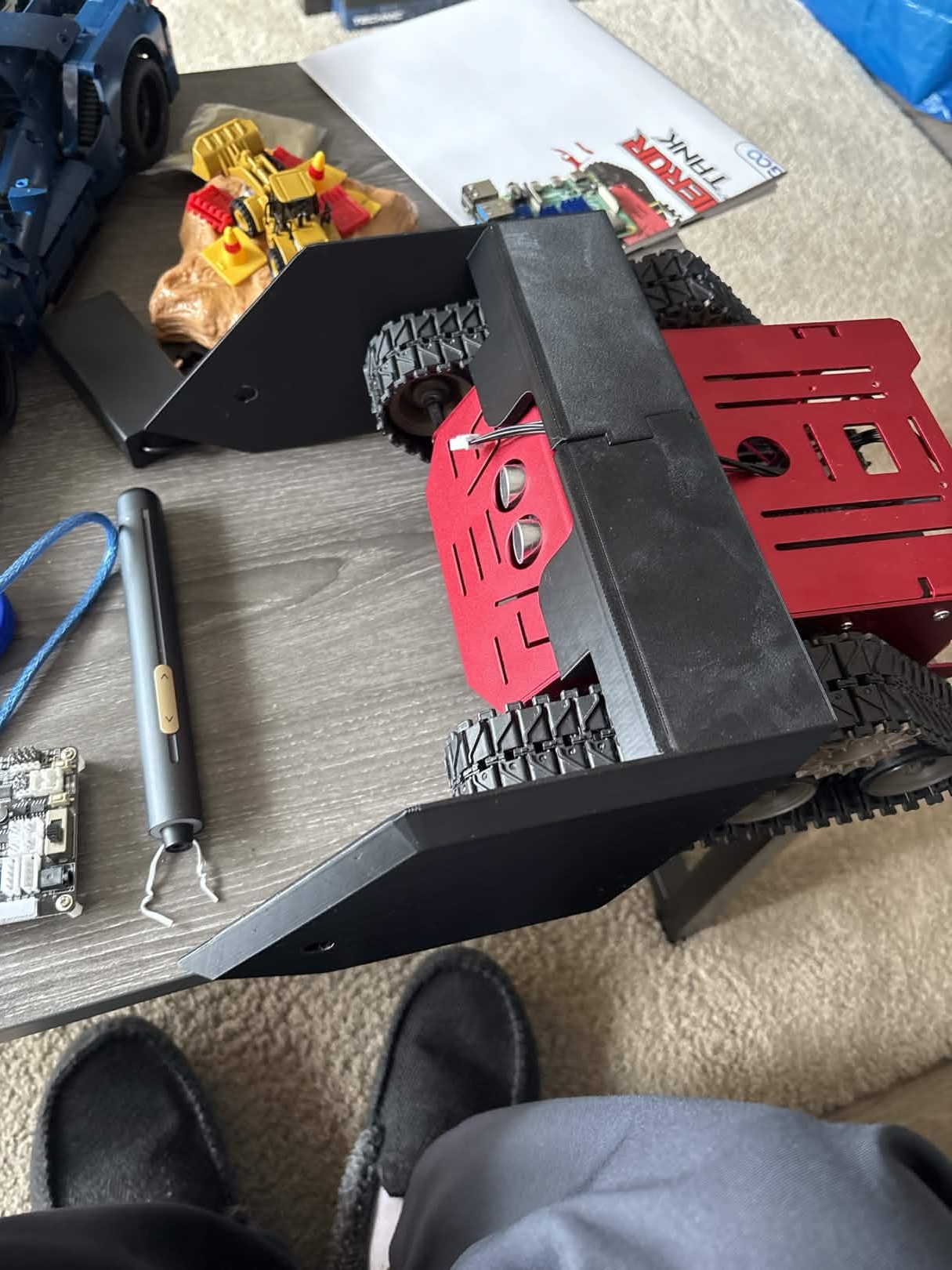
Final Design (minus the back side)
-
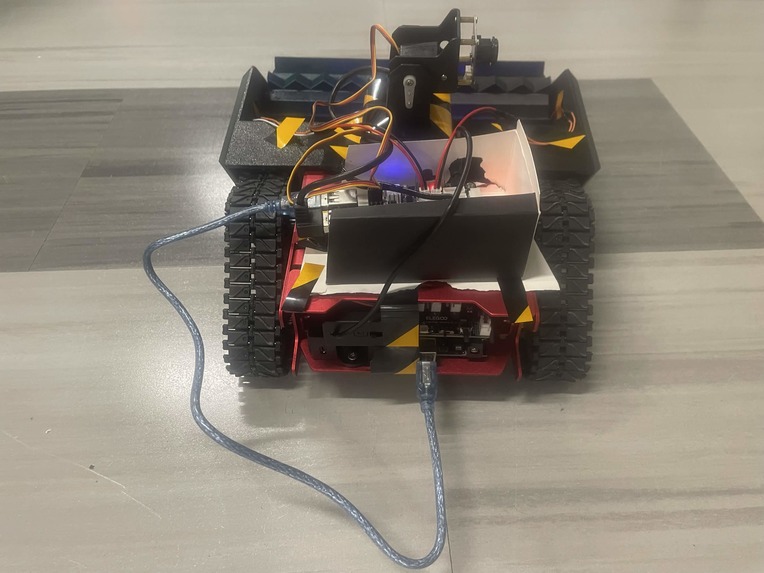
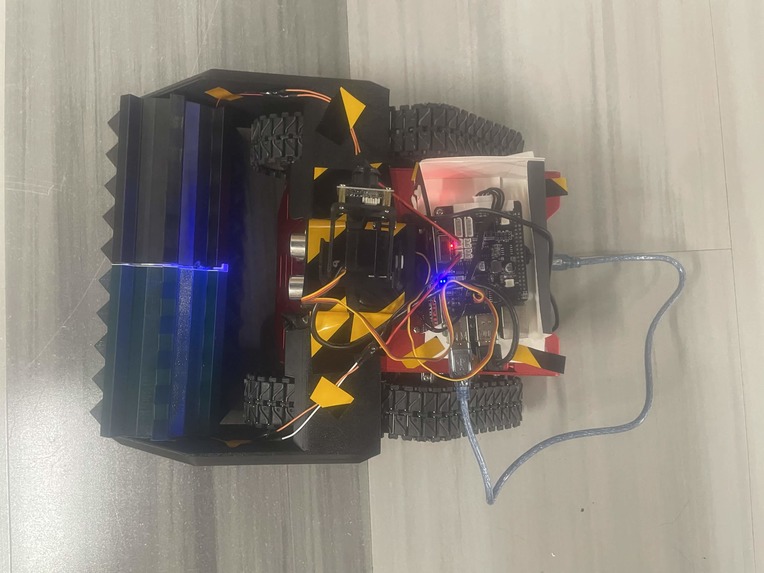
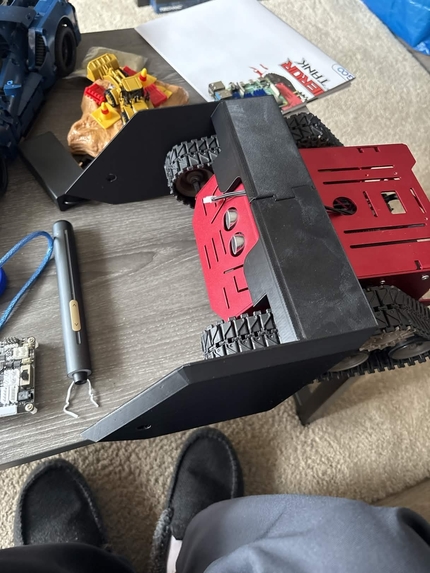
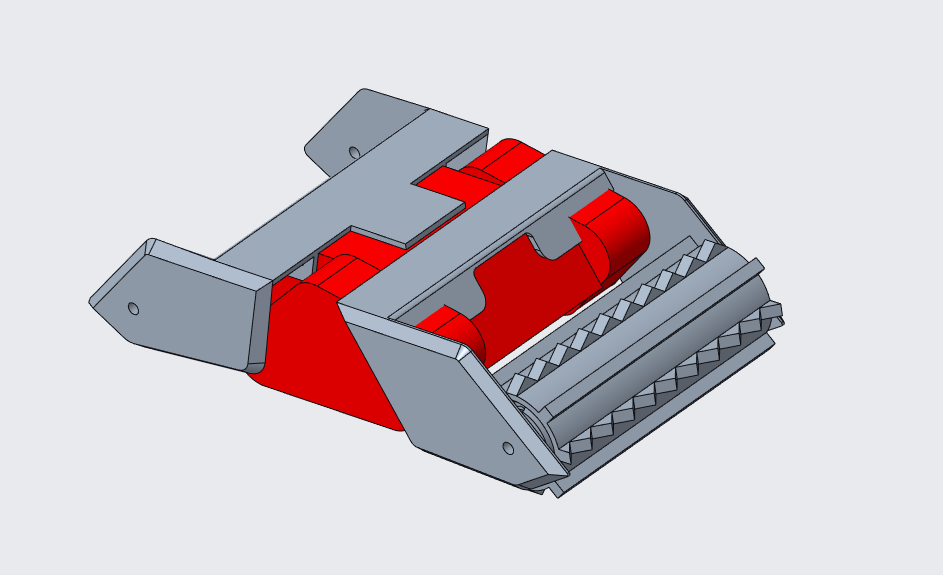
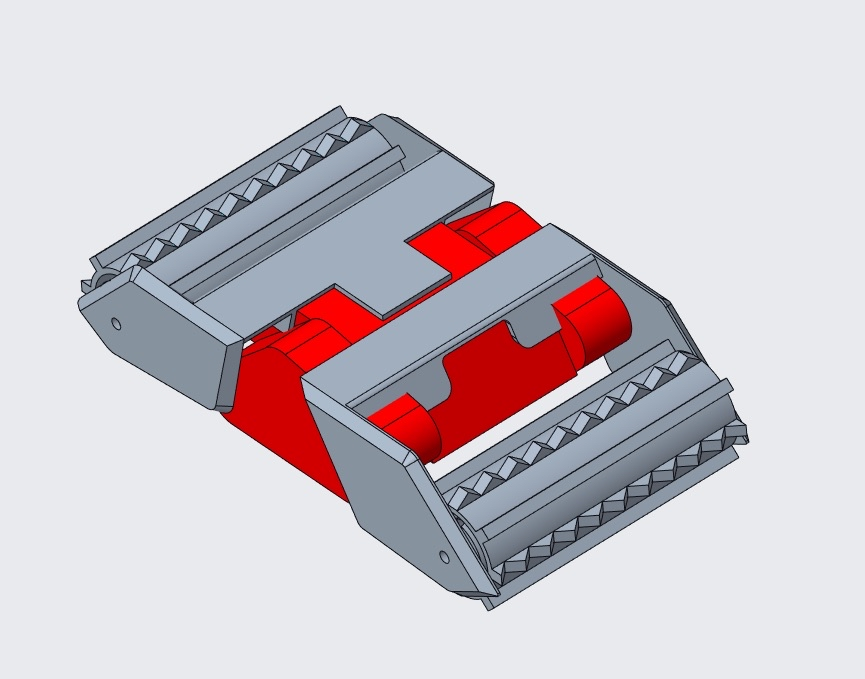
Initial Design
-
-

-

-



Inspiration
The name of our robot, "Palos," is inspired by the Sand Castle Pokémon, Palossand. Palossand is known for intaking sand to increase in size, and likewise, we wanted to encapsulate this sentiment for our robot. Our robot's mechanisms draw inspiration from a steamroller, as we saw its potential in being able to efficiently flatten sand while being a non-complex solution.
What it does
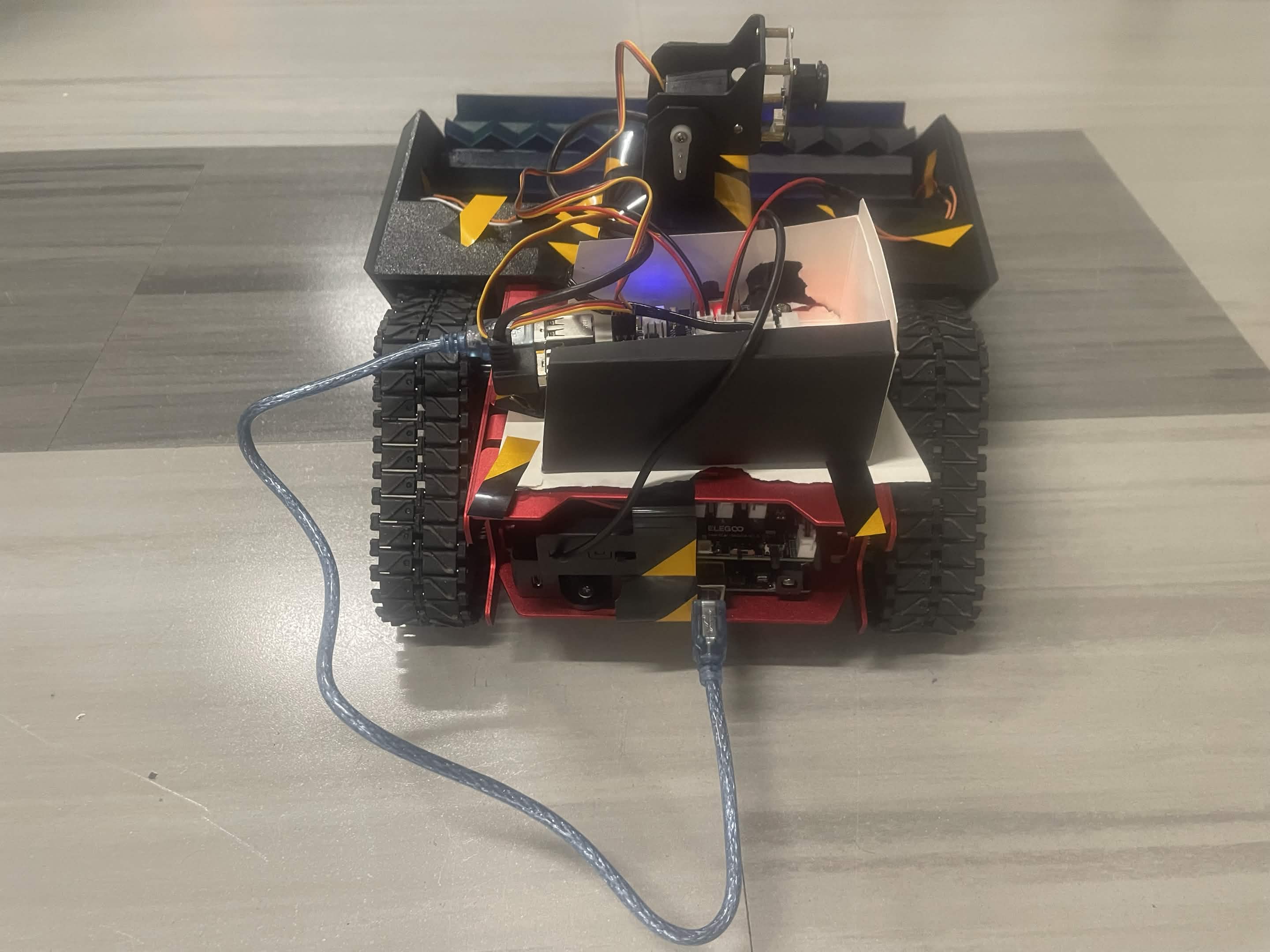
Palos follows a path similar to one taken by a lawn mower, going down and back through the sandbox while utilizing an ultrasonic sensors on opposite sides to accurately determine its distance to the walls and turn to start the next row of flattening. The robot utilizes a roller, modified with ridges to glide through the sand and cut it up, and a rear plate to smooth over any footprint the robot leaves behind.
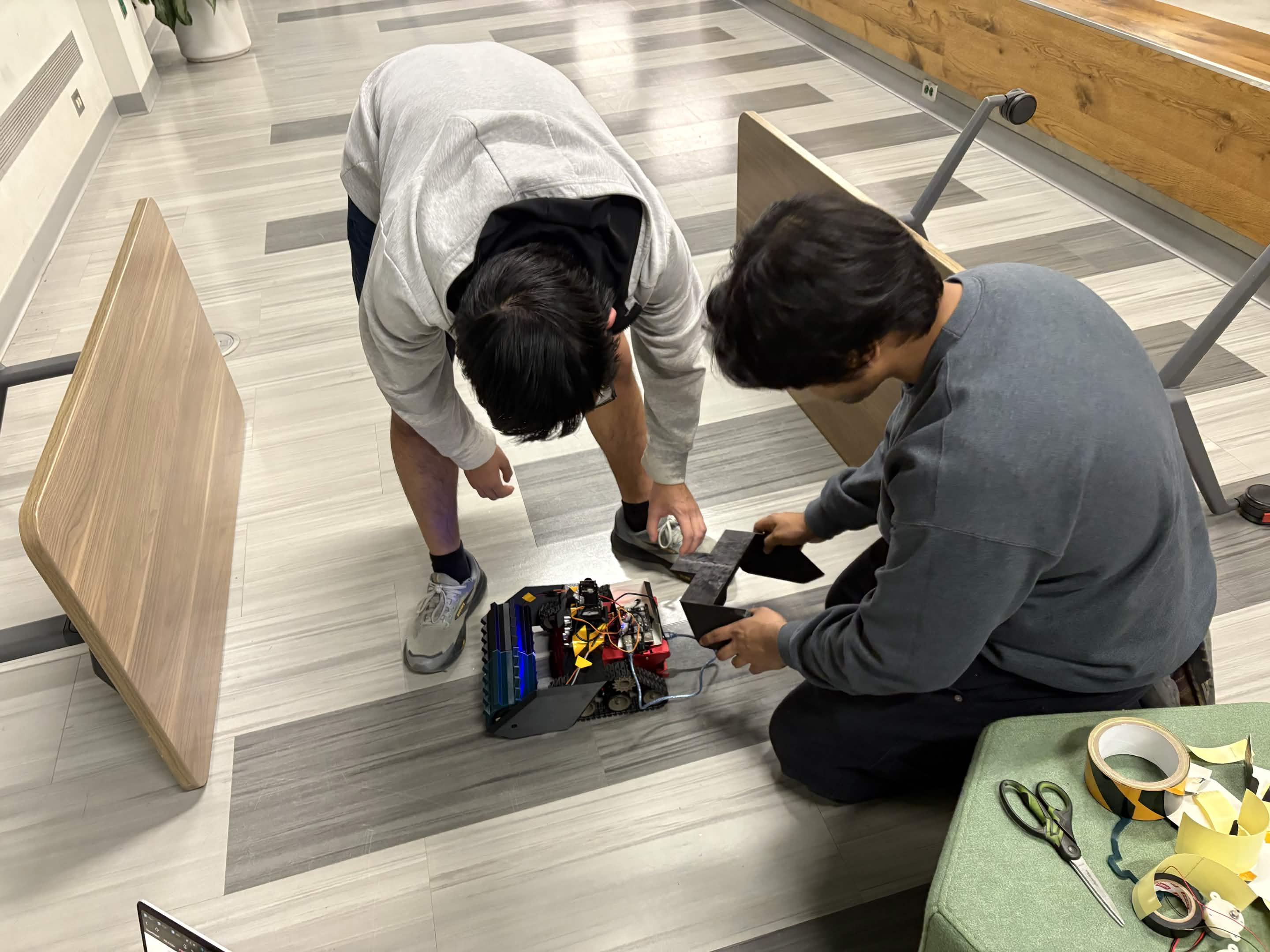
How we built it
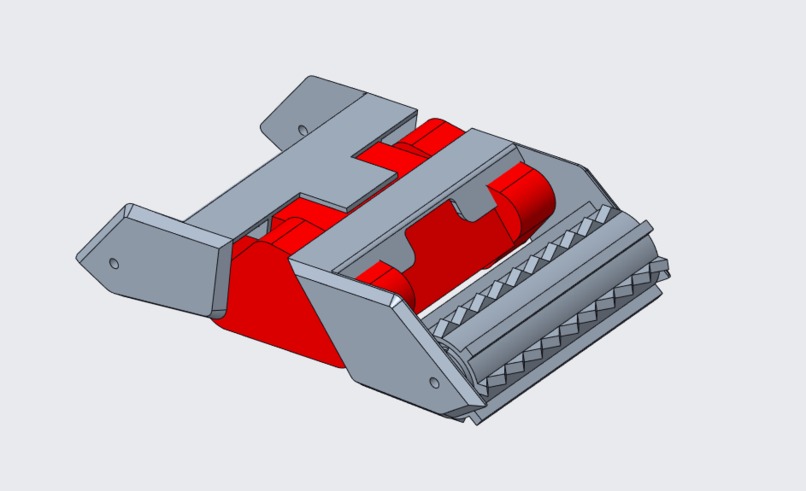
We built it by starting with the design. We spent time to carefully 3d model the robot and the attachments, and talked about possible issues that might occur. We delegated each person to a role- CAD, PID control, Teleoperation, and AI Integration for hazard detection. We split the printing across multiple 3D printers to save time.
Challenges we ran into
Our biggest hurdle was drivetrain synchronization. Even with our PID controllers zeroed out, we encountered an issue where the robot would immediately veer or turn when given a straight forward command. This forced us to dive deep into hardware diagnostics—checking for motor inversion, mechanical friction in the roller assembly, and ensuring the weight distribution was balanced enough for the single roller to operate without dragging one side. We also had to calibrate our ultrasonic sensors to ignore "sand noise" (erratic bounces off uneven piles) to ensure the robot didn't trigger a turn prematurely.
Accomplishments that we're proud of
We are particularly proud of our custom 3D-modeled chassis and roller. Moving from a dual-roller to a single-roller design allowed us to optimize the robot's footprint and reduce mechanical complexity while maintaining effective sand displacement. Integrating the ultrasonic logic to handle the "mowing" pattern autonomously was a major win, as it transformed Palos from a remote-controlled tool into a truly smart sandbox maintenance robot. We also integrated a TTS, GeminiAPI, and Supermemory to enable hazard detection and alert. GeminiAPI is used to analyze the field, providing data and information on where the biggest piles of sand are. The information about the initial sand levels is saved to Supermemory, where it stores the data for a user to check locations of the tallest areas, sand type, and any objects on the field. A TTS is used to send alerts of the field, notifying anyone in the area that a robot is operating near them.
What we learned
This project taught us that hardware is rarely "plug and play." We learned the importance of mechanical symmetry and how small variations in motor output or gear friction can drastically affect autonomous pathing. We also gained significant experience in iterative design—learning when to pivot (like moving to a single roller) to solve weight and maneuverability issues that weren't obvious during the initial CAD phase. We also learned that less is sometimes more. We had a lot of ideas and wanted to accomplish a lot, but the more ideas we stacked, the more complex it got. After focusing on the main goals and saving extra details and features towards the end, we were able to accomplish a lot more.
What's next for Palos
The next step for Palos is improving terrain adaptability. We plan to refine the rear smoothing plate with an adjustable suspension system, allowing it to maintain constant ground pressure regardless of how deep the sand is, much like the precision grading equipment used in large-scale construction.




Log in or sign up for Devpost to join the conversation.