

Inspiration
The need for automated, efficient pharmaceutical logistics inspired us to create PACK, a robotic system that leverages AI to streamline medicine transport using cutting-edge multi-agent systems and real-time simulation.
What it does
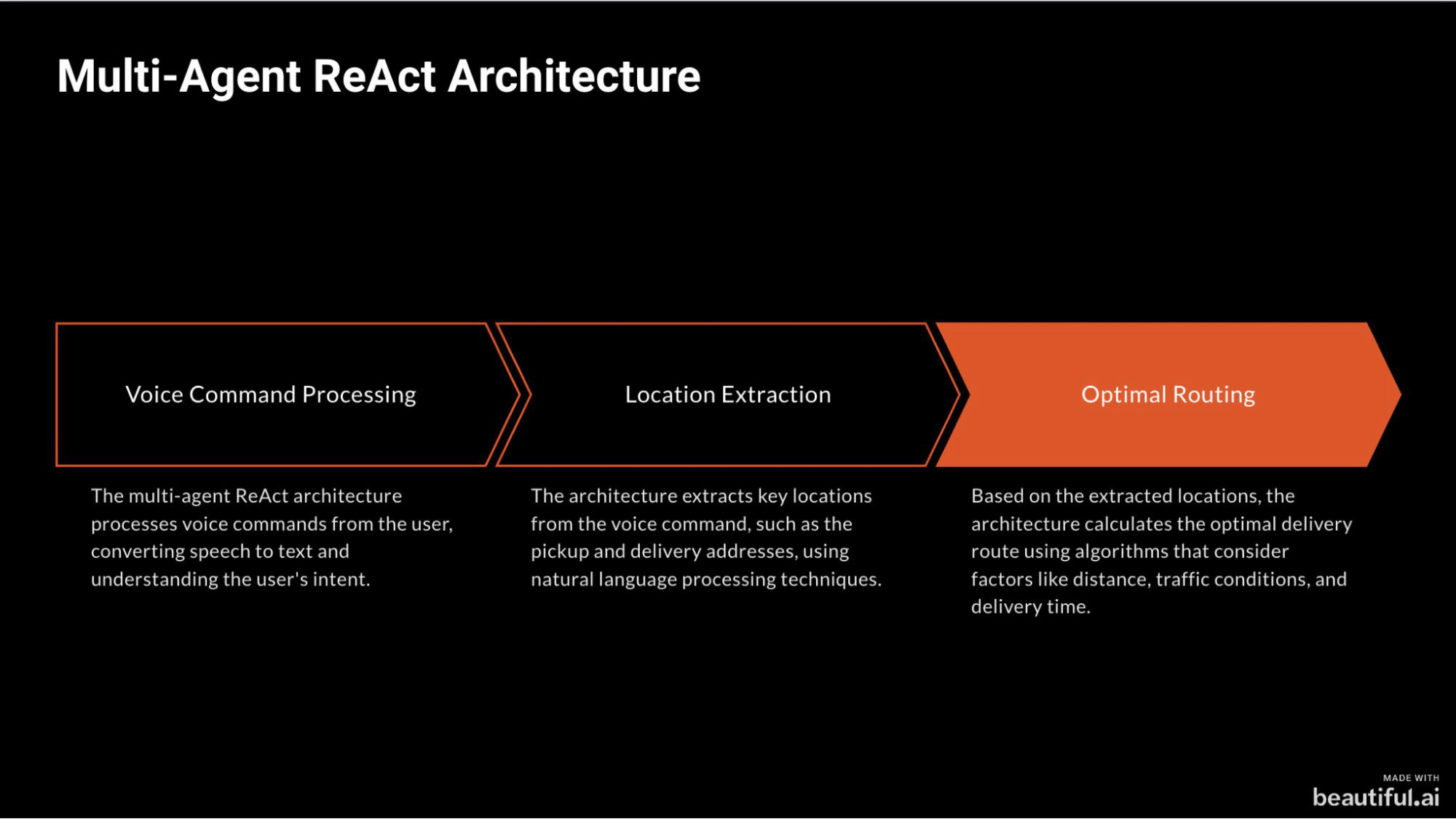
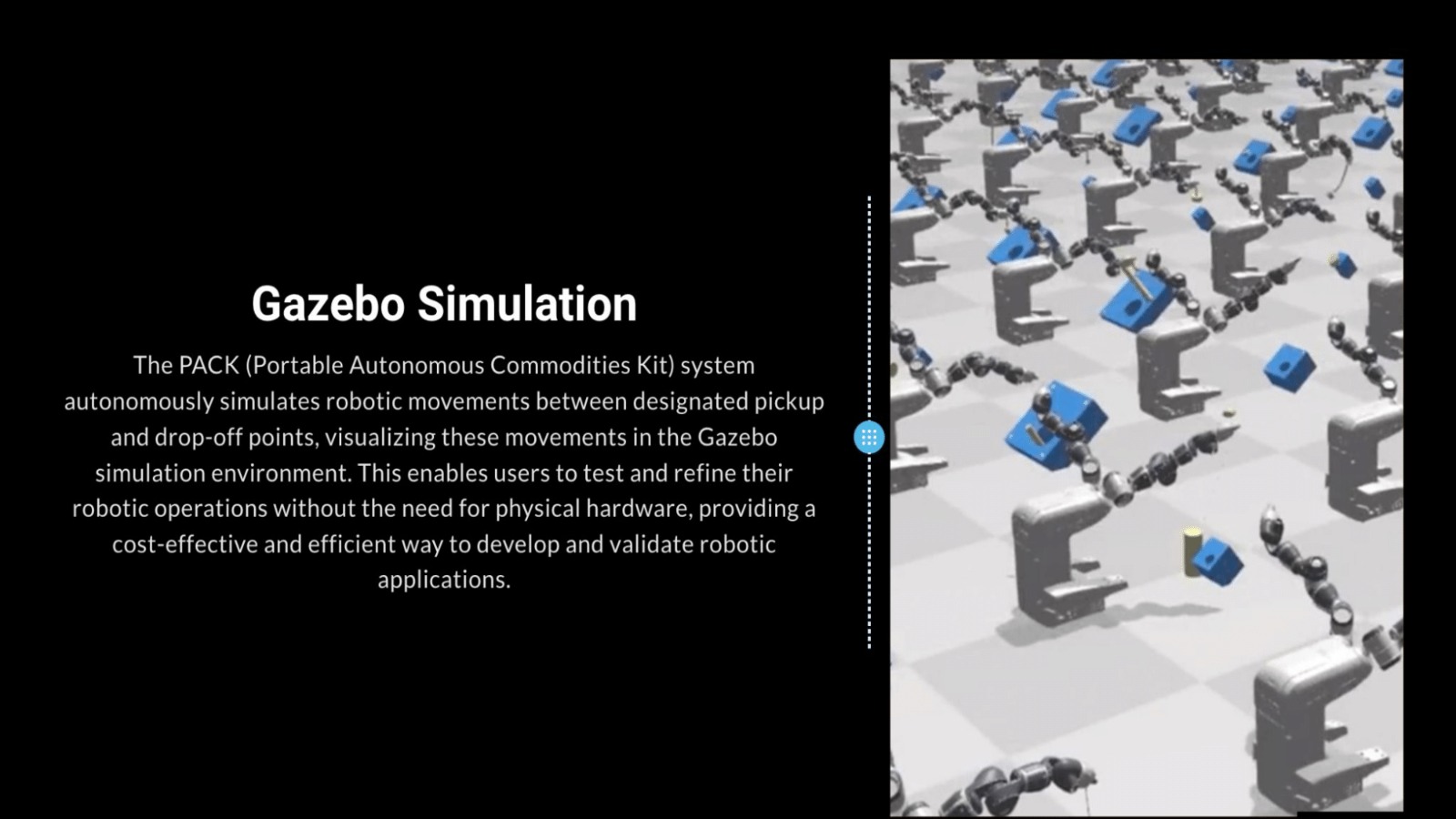
PACK uses a multi-agent ReAct architecture to process voice commands, extract key locations, and calculate the optimal delivery route. It autonomously simulates robotic movements between pickup and drop-off points, visualized in Gazebo.
How we built it
We combined OpenAI GPT-3.5, LlamaParse, and LangChain to build autonomous agents responsible for voice recognition, command parsing, and navigation planning. These agents collaborate seamlessly to control a robot in a Gazebo simulation, optimizing pharmaceutical deliveries.
Challenges we ran into
Key challenges included synchronizing multi-agent decisions with Gazebo’s visualization, ensuring precise voice command interpretation, and extracting structured data from documents for route planning.
Accomplishments that we're proud of
Successfully creating an autonomous, multi-agent system that dynamically simulates pharmaceutical deliveries in a Gazebo environment.
What we learned
We learned to integrate AI-driven multi-agent workflows with robotic simulations. The project deepened our expertise in real-time decision-making, agent coordination, and simulation environments.
What's next for PACK: Pharmaceutical Autonomous Cart for Kinetics
We plan to implement real-world robot deployment, improve obstacle avoidance with machine vision, and scale to multi-robot systems for more efficient, intelligent pharmaceutical automation.
Methodology
This was developed in a traditional way from scratch
Built With
- gazebo
- google-speech-recognition
- langchain
- langchain-tracer
- langsmith
- llama-agents
- llama-cloud-api
- llamaindex
- llamaparse
- openai-api-(gpt-3.5-turbo)
- pinecone
- python
- rviz
- streamlit
- toolhouse




Log in or sign up for Devpost to join the conversation.