-
-

Small P.A.C.R.
-

Double-decker P.A.C.R.
-
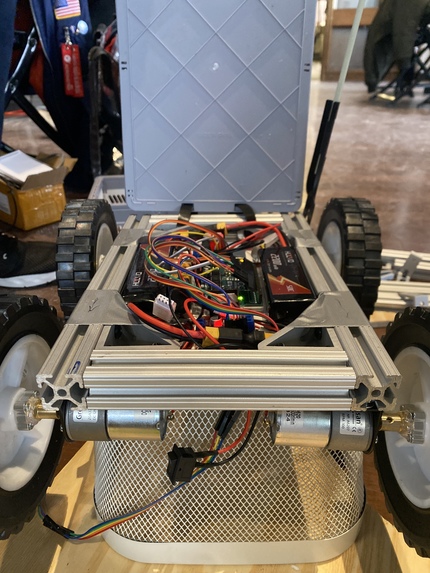
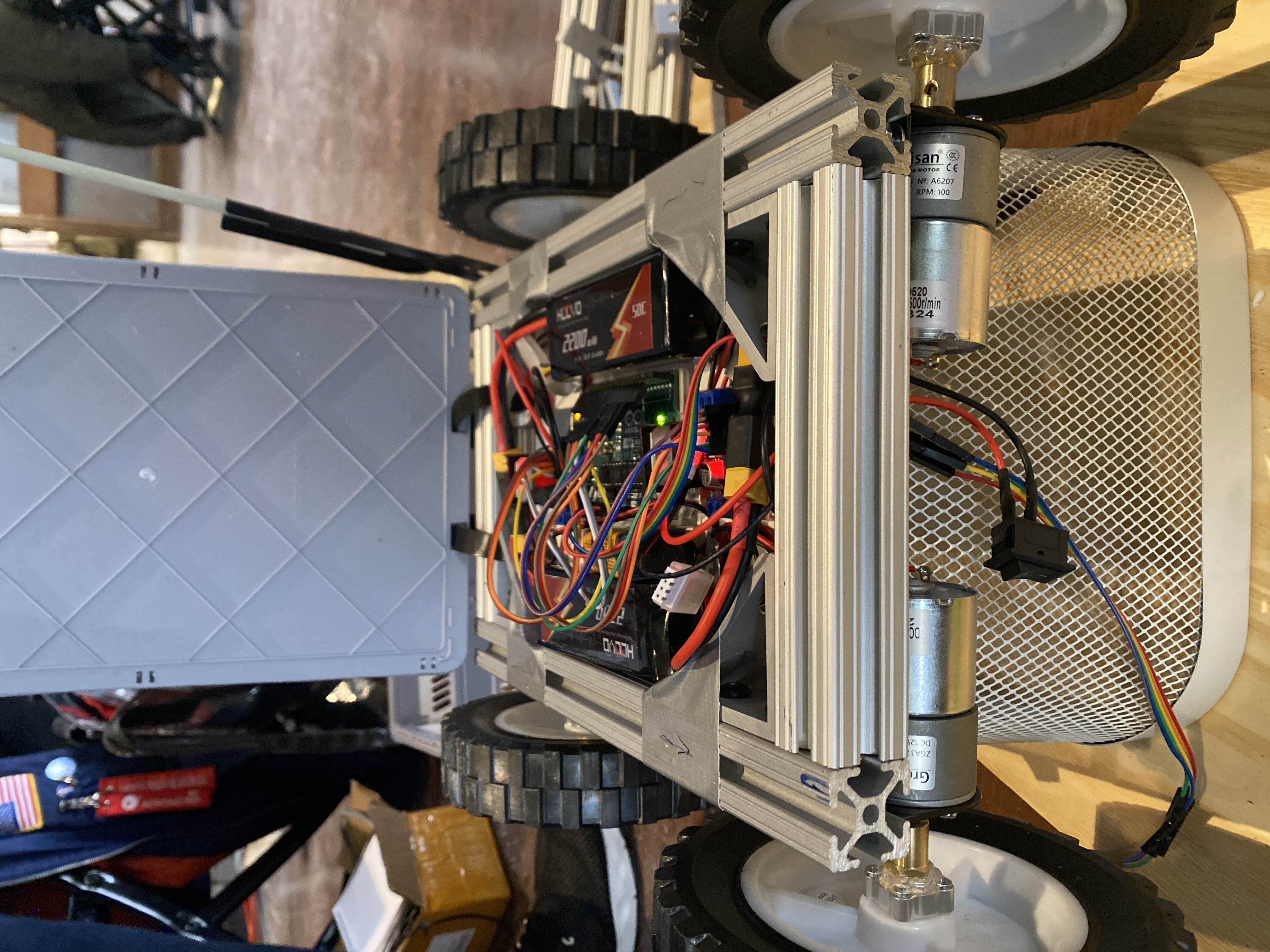
Motors and wiring underneath baskets pt. 1
-
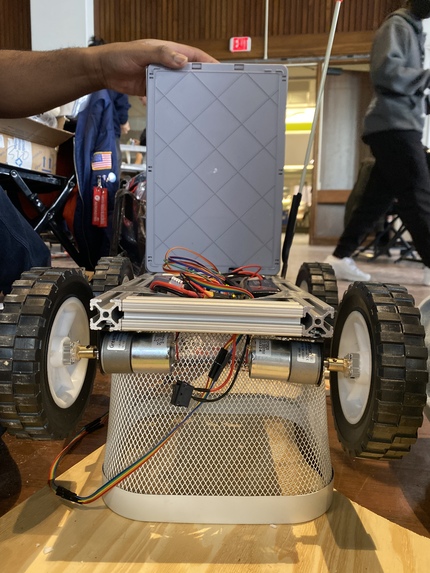
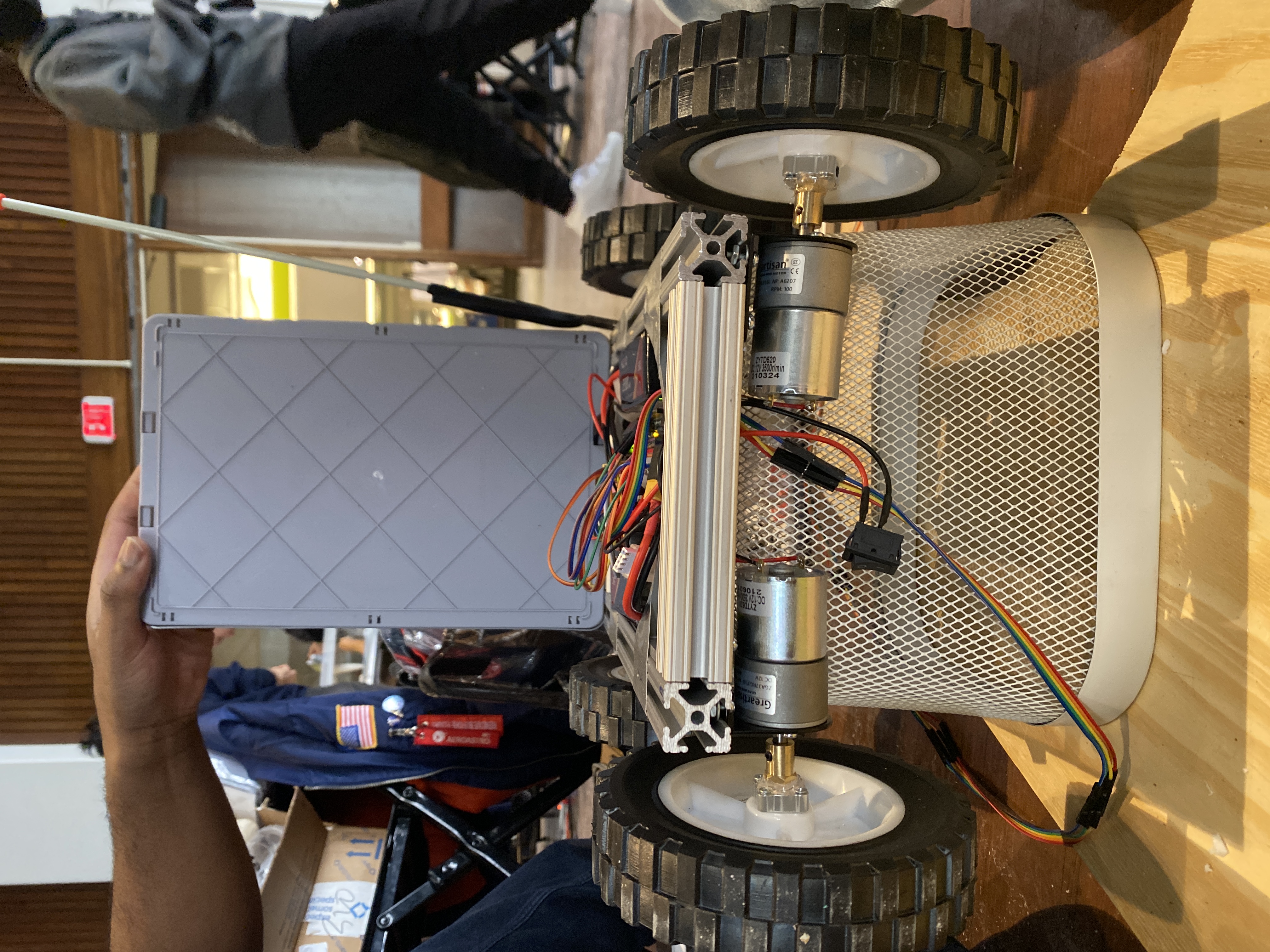
Motors and wiring underneath baskets pt. 2
-

Early version of our color detection (was refined and able to detect color with high accuracy later, but no pictures unfortunately)
-





Inspiration
Inspired by the theme of “recovery,” we sought to develop a robot that can help individuals with limited mobility or strength recover the ability to do important daily tasks that require carrying many items at once or heavy objects.
What it does
P.A.C.R. uses color detection and tracking to follow behind you as you walk while carrying all of your things! Its compact but sturdy build equipped with stackable baskets makes it the perfect assistant for tiring walks to class or grocery shopping. P.A.C.R. was also designed for those with disabilities in mind, who may benefit from having a hands-free, weightless method for getting from place to place with everything they need.
How we built it
Hardware: We created the main frame with 80/20 extrusion and connectors, then mounted some 12V motors using brackets. The basket is Velcro-tied to the frame, and the electronics were rested on a foamcore platform underneath. There are also 3D-printed cat ears and mounts, with speakers for audio output and LED strips for aesthetics.
Software: Using the Viam app and Viam’s RGB line follower program as a guide, we successfully got our robot to identify a given color and print whether it should move right or left depending on where it saw the color. It was able to scan around each area it saw the color and determine where the color started and stopped with pretty high accuracy, being able to differentiate between red and orange that appeared on camera to be very similar shades.
Challenges we ran into
- Supply limitations - The motors we were able to get were not as powerful as we were hoping. The metal we had is also quite heavy, which reduces the weight that P.A.C.R. can handle.
- Connection issues - While we were able to get our Viam rover to connect and have the camera work perfectly on day 1, we were not able to reconnect on day 2, which meant we could not test motor movement and make the Viam rover actually move as a response to the color detection.
- Loose wheels - We found that when P.A.C.R. moved, the movement would unscrew the wheels. We also only had set screws to couple to the D-shafts on the motors, which is not ideal for high torque applications.
Accomplishments that we're proud of
We made it! Everything worked at some point!
What we learned
Power electronics! One person learned how to code for the first time!
What's next for P.A.C.R.
- Standardizing hardware
- Hard-coded computer vision
- Achieving a more lightweight frame.

Log in or sign up for Devpost to join the conversation.