


Inspiration
The goal of accuracy monitoring of LiDAR sensing equipment.
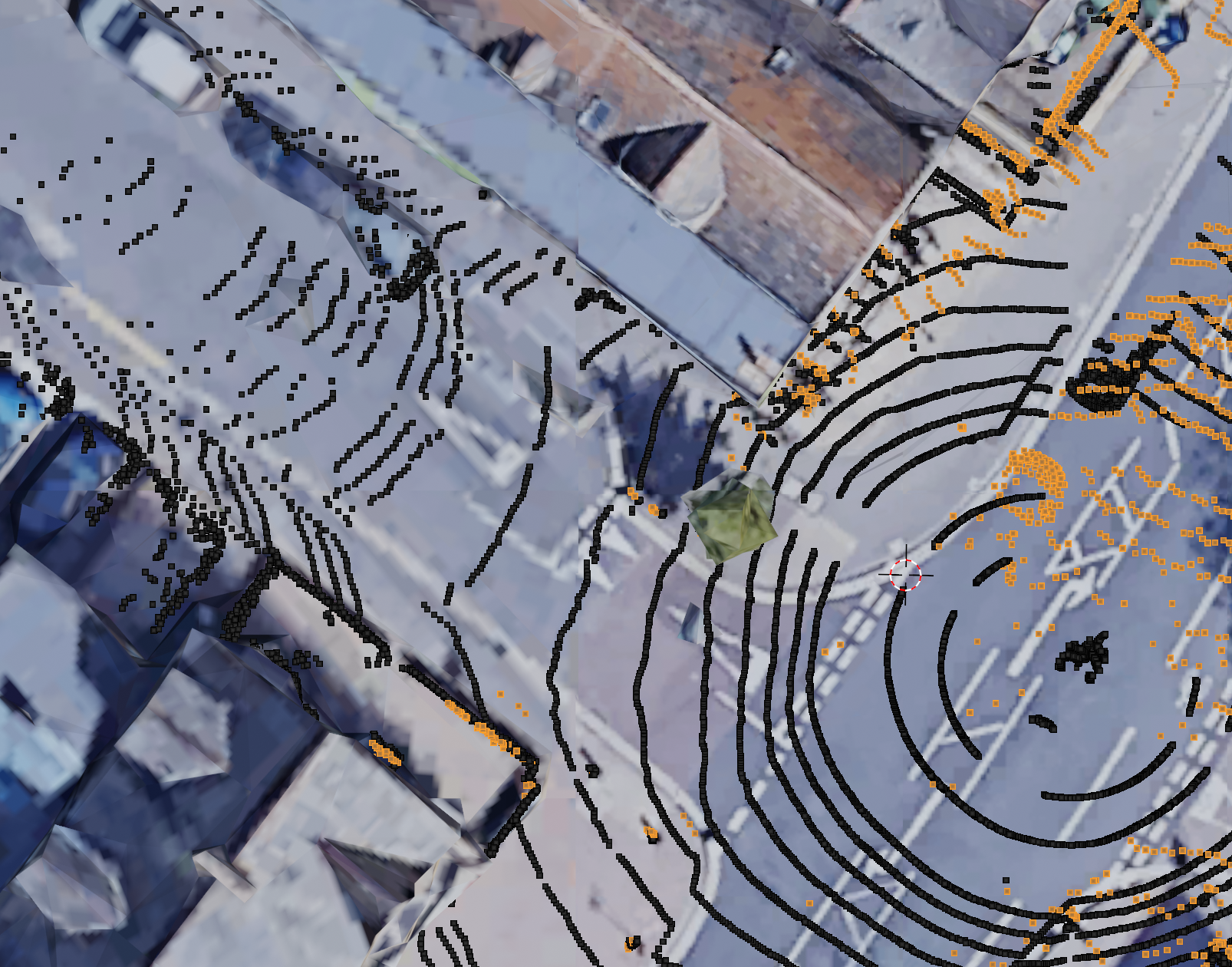
What it does
Displays locally registered LiDAR scans onto a real-world 3D view for calibration and as a visual aid.
How we built it
We used CloudCompare for the registration task, beginning manually then applying Iterative Closest Point (ICP). After this we tried numerous mesh generation approaches, settling on MeshLab's Surface Reconstruction via the Ball Pivoting algorithm. We then extracted 3D imagery using MapsModelsImporter, leaving finally calibration and animation for Blender.
Challenges we ran into
Poor meshification requiring various attempts for sensible denoising. Additionally these data are rather sparse and the data format export may have incurred loss of geotagging.
Accomplishments that we're proud of
It's looks accurate, was fun to have the corners match up with the real world geometry!
What we learned
FOSS 3D is highly varied in input mechanisms and stability, but a number of well-established techniques are documented impressively.
What's next for Oxbotica Lidar Real-world Accuracy Visualisation?
We'll see, hopefully it provides vague value 😅
Built With
- blender
- cloudcompare
- meshlab

Log in or sign up for Devpost to join the conversation.