-
-
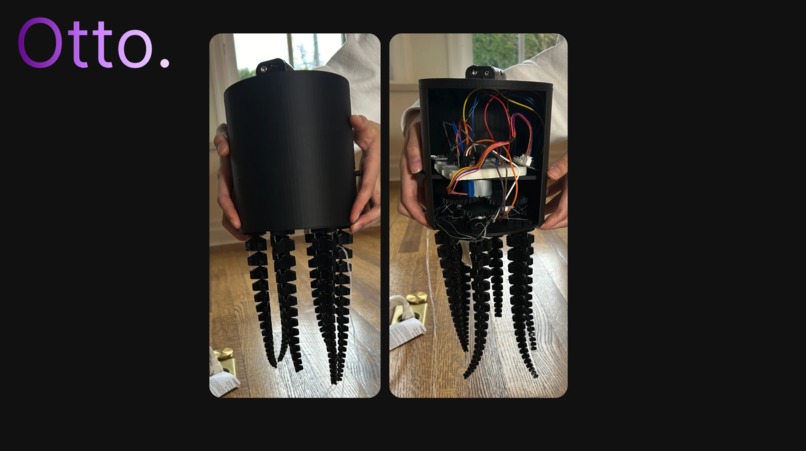
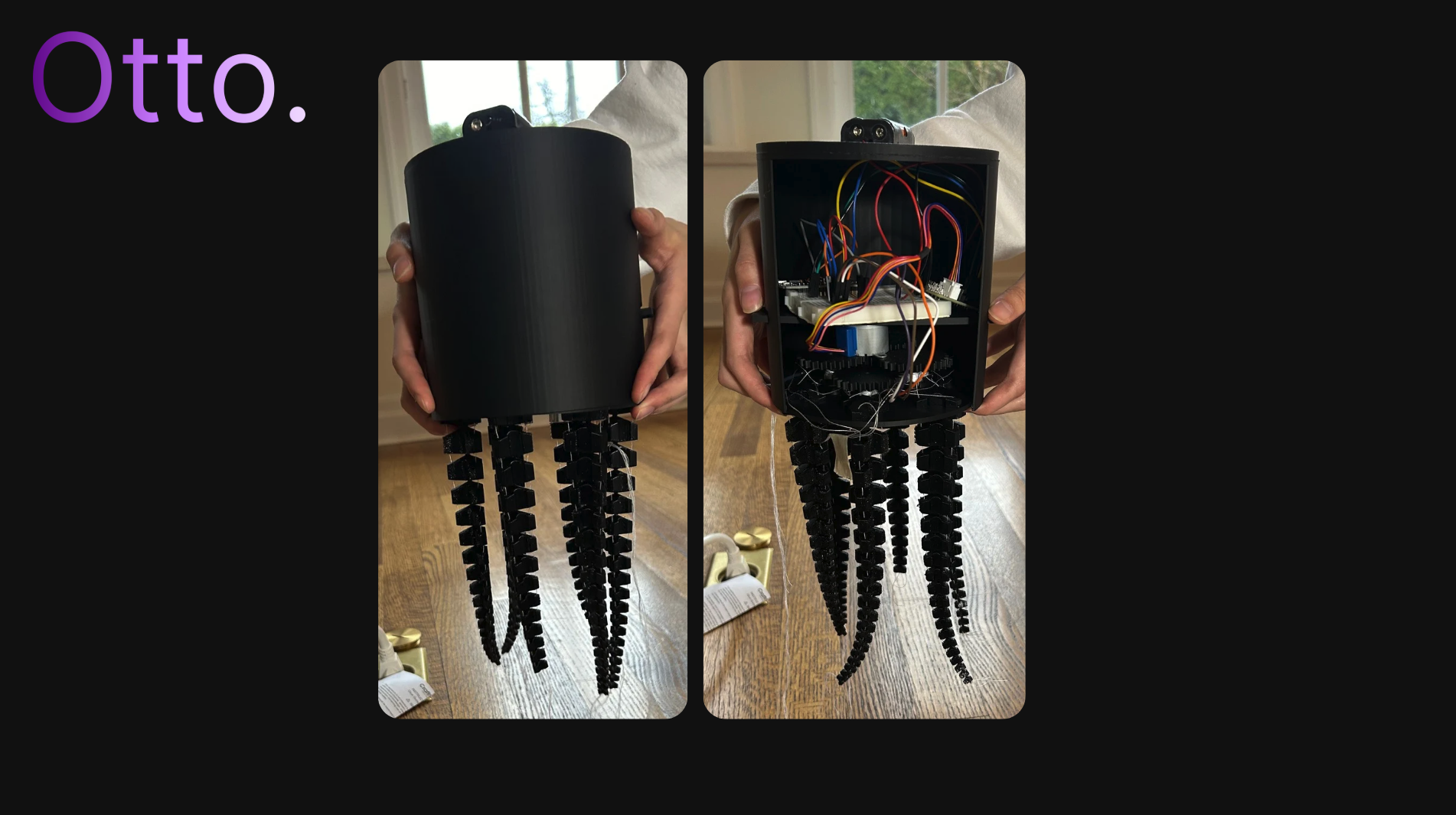
Otto the robot
-
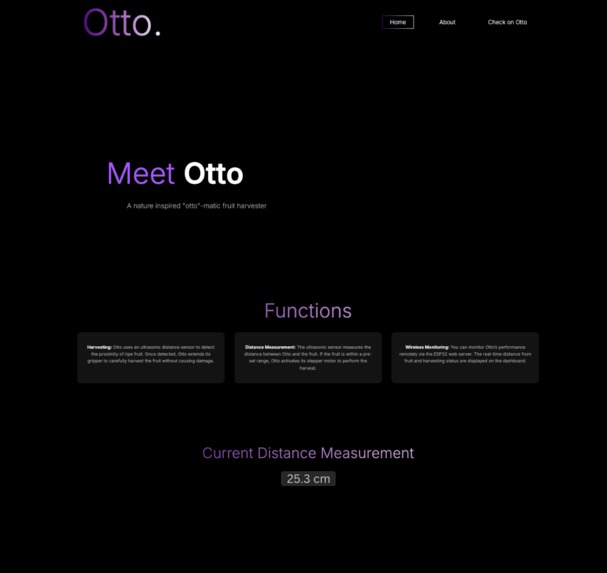
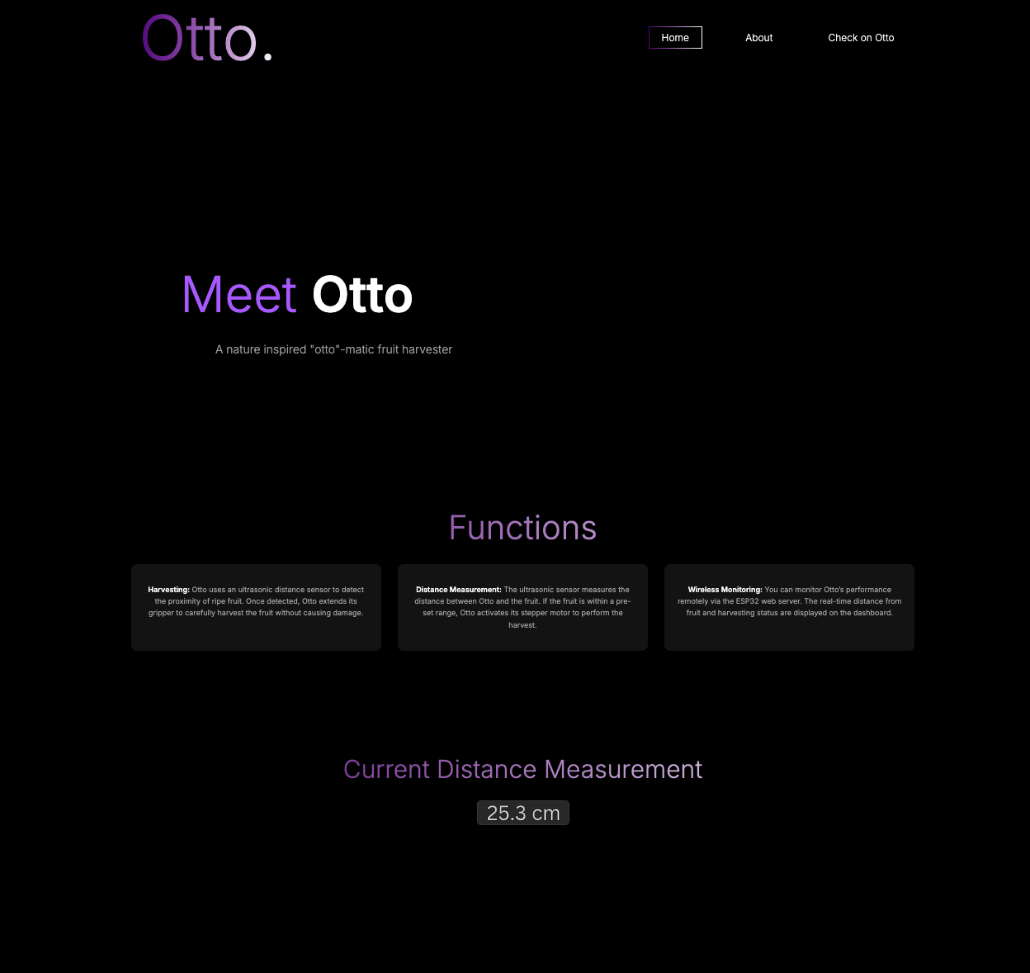
Otto website with ultrasonic sensor data displayed
-
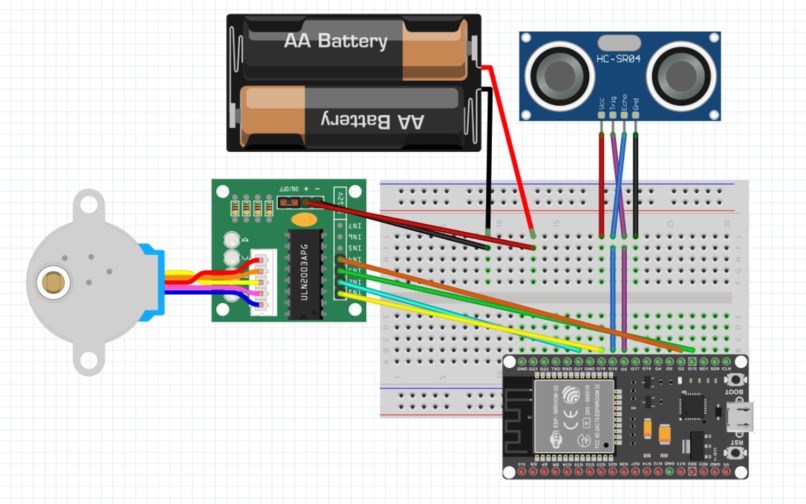
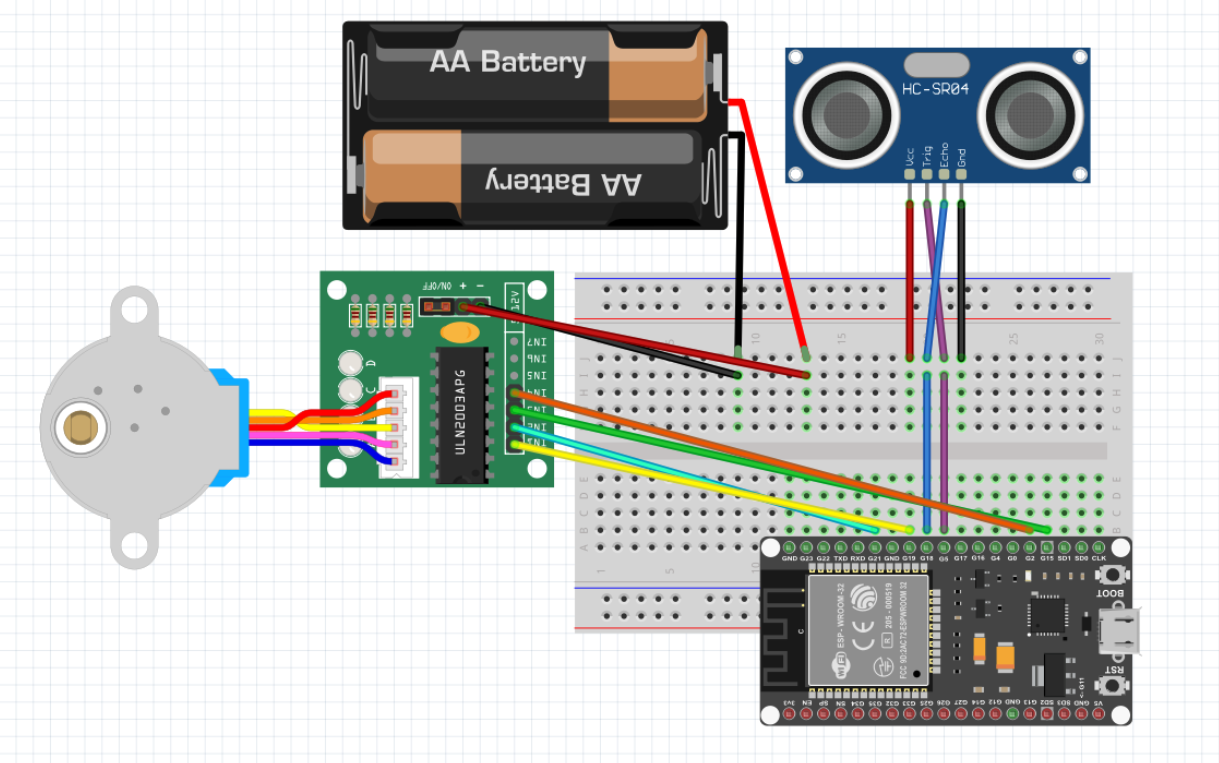
Electronic Schematic
-
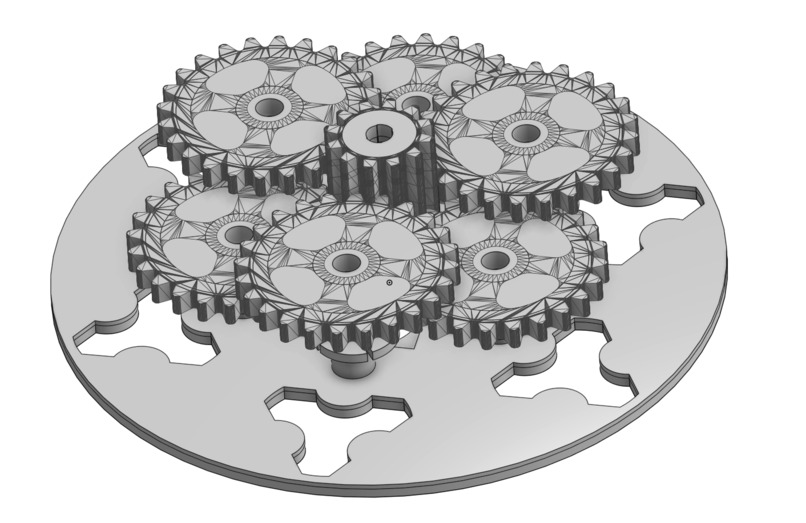
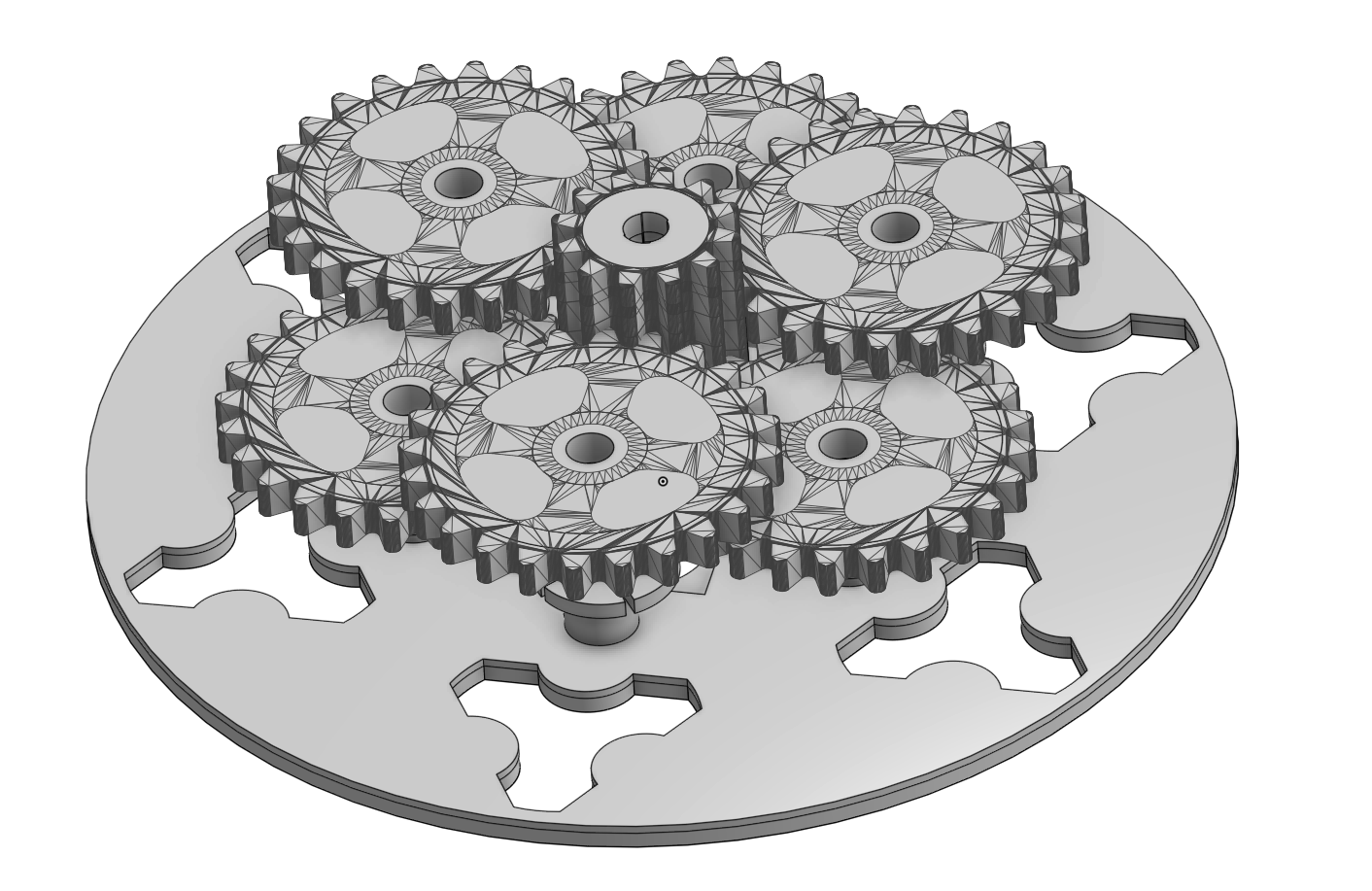
Gear system for controlling the robot gripper
Inspiration
Our inspiration for this project came from the adaptability and dexterity of octopus tentacles, which can grasp and conform to objects of varying shapes and sizes. Unlike traditional robotic arms with rigid structures, octopus tentacles can achieve smooth, flexible movements, allowing them to interact delicately with their environment. This natural efficiency sparked the idea of applying biomimicry to robotics, particularly for tasks that require precision and care, such as fruit harvesting.
What it does
Our robotic arm is designed to provide a soft, adaptive grip that outperforms traditional robotic arms in tasks requiring precision and care. Unlike rigid robotic grippers, which rely on fixed joints and limited contact points, our flexible tentacle design conforms to the shape of the object it grasps, distributing pressure evenly to prevent damage. This makes it especially effective for handling delicate items like fruit, fragile materials, or irregularly shaped objects that require a controlled, gentle touch. The tentacles curl and uncurl around objects, mimicking the way an octopus grasps its surroundings, ensuring a secure yet non-destructive hold. This level of adaptability allows for safer and more efficient handling in environments where precision is essential.
How we built it
On the mechanical side, we used OnShape to 3d model and print our parts. On the electrical side, we have an ultrasonic sensor that can detect distances and can trigger a stepper motor to turn and move the arms when a fruit is detected to be close by. On the software side, our ESP32 microcontroller sends distance data collected from the ultrasonic sensor to a web server that can display that data and other information about the robot.
Challenges we ran into
One of the main challenges we faced was that we originally had a gear structure with a larger gear in the centre turning smaller gears, but that made it really hard for the motor to turn. we realized that we needed to switch the setup–we needed to put the smaller gear in the centre and larger gears on the outside to maximize the torque (or in other words, to make it easier to rotate).
Accomplishments that we're proud of
Finally being able to lift items with the gripper! It was great to see all the different software, hardware, and electrical components come together.
What we learned
We learned that having larger motors on the outside produces greater torque, among other things.
What's next for Otto
Test runs at the fruit orchard?
Built With
- 3d-modelling
- 3d-printing
- esp32
- onshape
- pla
- stepper-motors
- tpu
- ultrasonic-transducer


Log in or sign up for Devpost to join the conversation.