-
-
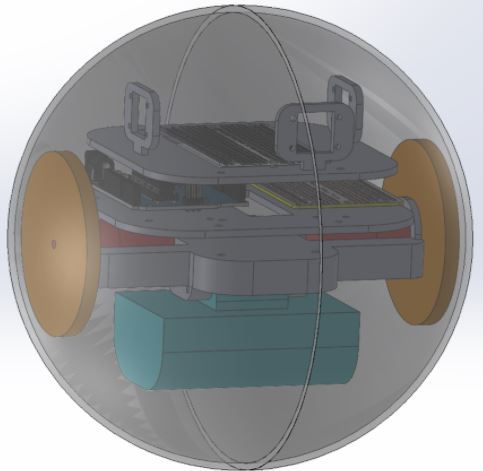
Ideal Robot, designed In CAD
-
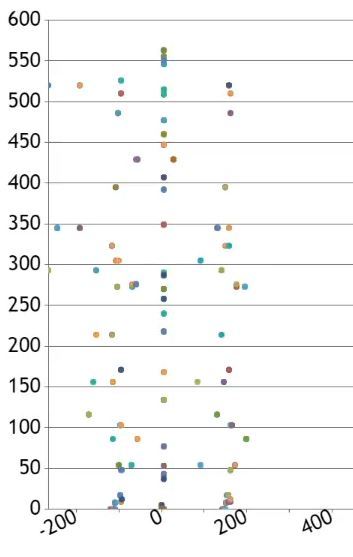
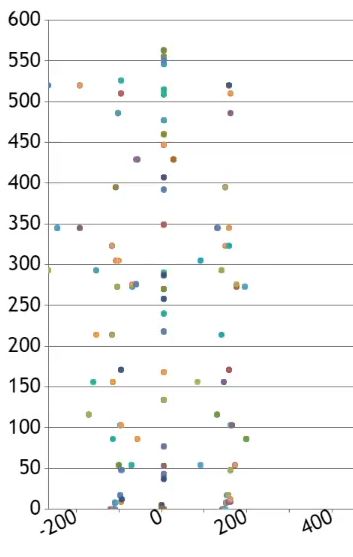
LIDAR real time map results
-

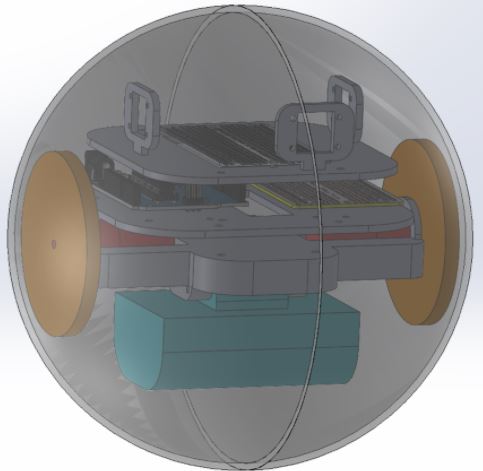
Real robot

Inspiration
Iron Man movies where he scouts out an enemy location
What it does
Takes input from LIDAR to avoid obstacles, then relays these data points back to mainboard and reconstruct the environment's obstacles.
How I built it
3D printing cases, use off-the-shelf components, C and Python programming.
Challenges we ran into
Sphere is hard to accomodate and design around. VL53L0X sensors are not that nicely documented for AVR C controller coding. LIDAR mapping needs more than just distance sensing, orientation is also hard.
Accomplishments that we're proud of
LIDAR real time map. Avoiding obstacles based on TOF sensors.
What we learned
TOF sensors and how they work. Object Avoidance structures. Pushing live updates and remapping data points to a webpage.
What's next for Orwell's Sphere
Improvements outlined in the demo.

Log in or sign up for Devpost to join the conversation.