Inspiration
Oil spills pose a significant threat to coral reef and coastal ecosystems, where even relatively small amounts of oil can cause long-lasting damage. Unfortunately, the occurrence of oil spills is hard to predict as they are primarily due to human error. We must approach this problem from a different angle. Rather than predicting outcomes and attempting to change them, we assess the risk of different trade routes to mitigate impact under the assumption that an oil spill will occur.
The Model
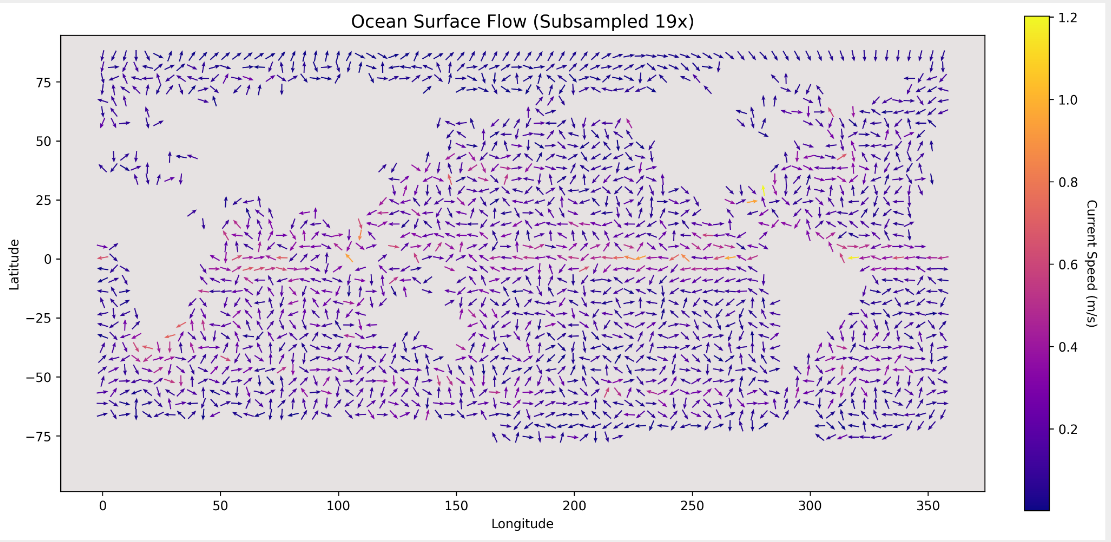
Our product models maritime environments as a data-driven directed graph. The graph forms a grid over a map where the weights on each edge are modeled by averaging empirical data on current flow with added edge perturbation using stochastic noise.
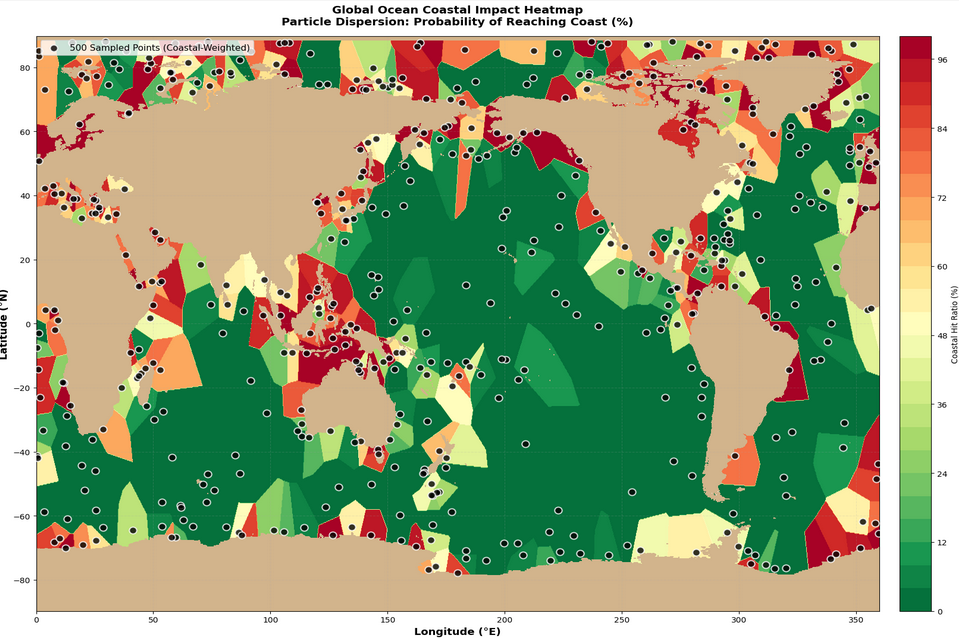
For each node, we run multiple Monte Carlo simulations for different realisations of the fluid flow. Modelling the oil spill as a collection of particles, we can track the number of particles which reach the coast or a reef, compare it to a set threshold indicating the volume of oil which would pose a substantial risk. Averaging these results over multiple simulations derives probabilistic risk estimates for every node.
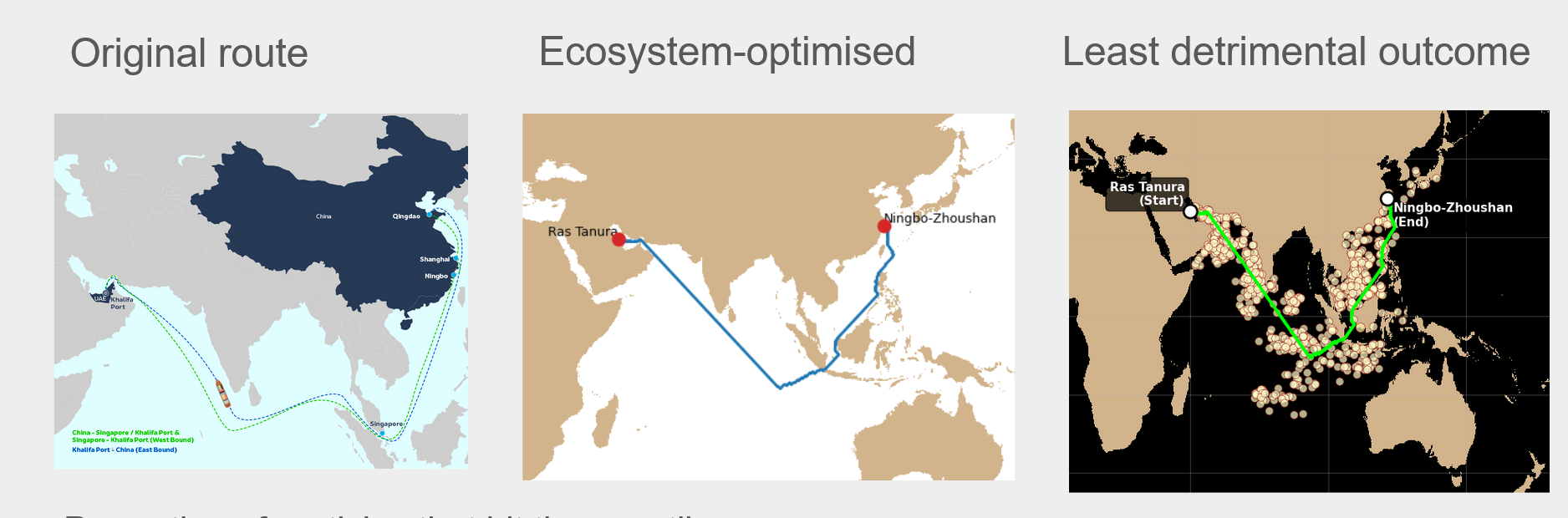
For any proposed trade route, the product aggregates these local risks to estimate overall route safety, while naturally penalizing longer routes through higher spill likelihood. Moving through the graph from A to B, we arrive at a collection of probabilistically viable routes to minimise risk.
The result is a clear, quantitative assessment of environmental risk across shipping routes, enabling informed, safety-aware planning under uncertainty
Accomplishments
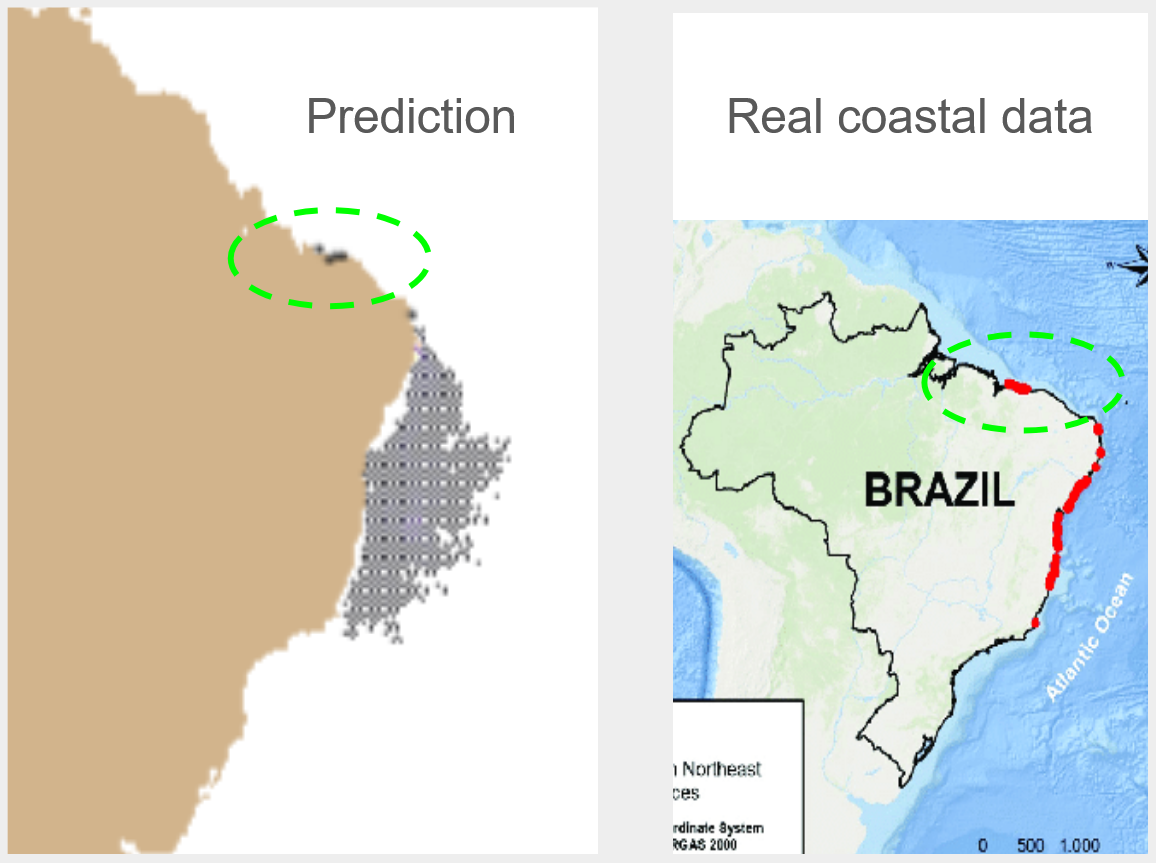
Our model displayed high precision when attempting to model real past oil spills given start conditions. We were also quantitatively show a decrease in the damage to coastlines and reefs when comparing shipping routes
The project is novel in how it combines physical simulation, probabilistic modelling, and viability analysis to move beyond standard oil-spill prediction. Rather than producing a single most-likely outcome, it explicitly characterizes uncertainty and uses it to identify a set of environmentally viable routes. This integration of Monte Carlo particle simulations with graph-based viability constraints enables decision-making that is both risk-aware and actionable, offering a practical and innovative approach to routing under environmental uncertainty.
What Next?
The framework is inherently extensible and adaptable. Key assumptions, such as the probability of a spill occurring at a node or the choice of environmental damage thresholds, can be modified or refined as better data or domain-specific knowledge becomes available. This flexibility allows the model to evolve without changing its core structure.
Because the environment is represented abstractly as a directed graph informed by empirical flow data, the approach is applicable to any body of water, from coastal regions to open seas, provided suitable data is available. While the model is intentionally high-level, it produces results that are directly useful: a bounded set of viable routes that balance operational needs with environmental risk. This combination of generality and actionable output makes the approach both broad in scope and practically valuable.

Log in or sign up for Devpost to join the conversation.