Inspiration
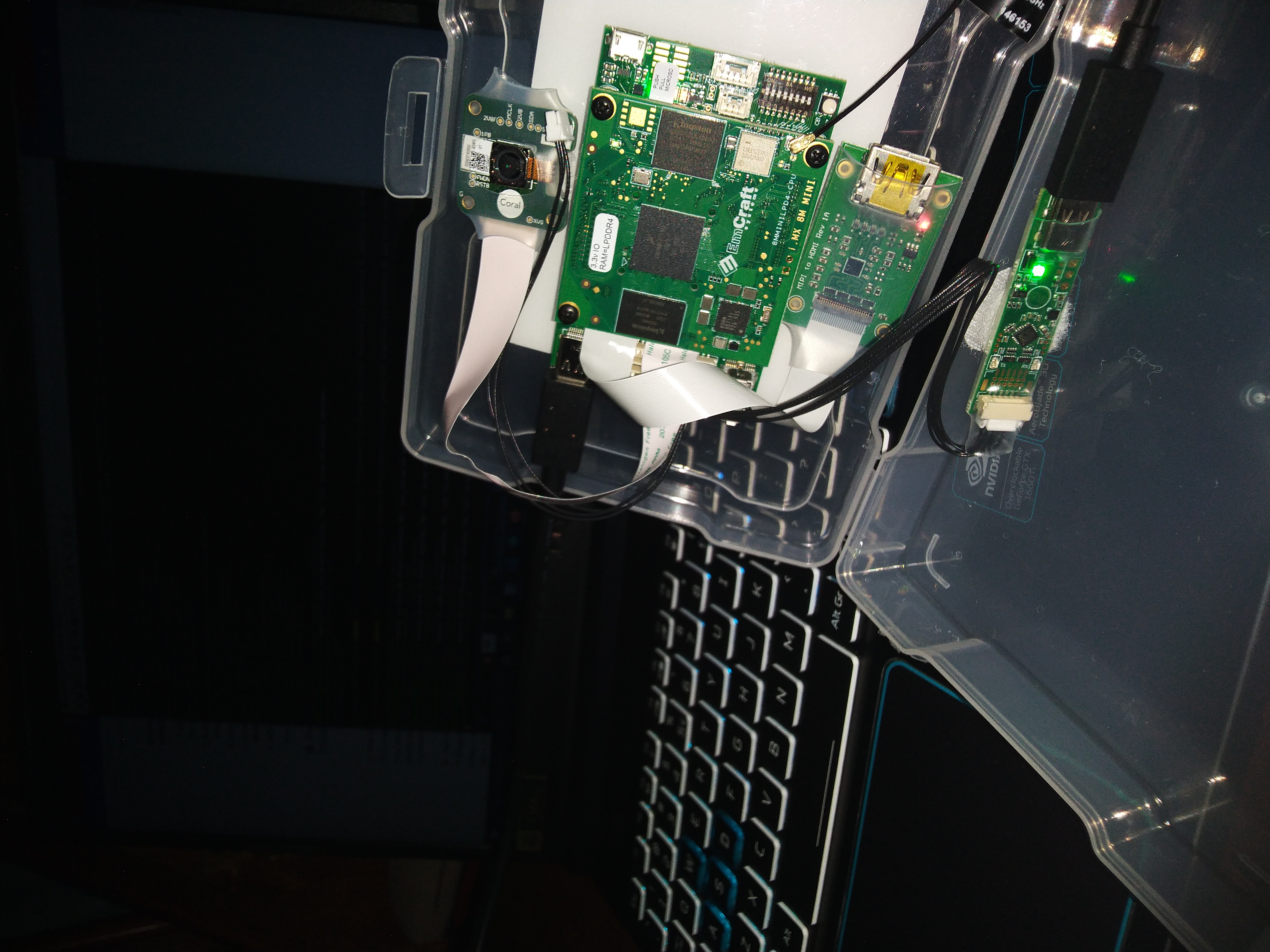
This weekend I wanted to try out the object detection on my NavQ Mini Board which I received from HoverGames 2 for making a drone. Unfortunately, due to many restrictions, I was not able to receive my drone. So, I had my NavQ lying around. The great thing is that it had a Google Coral Camera with it. So, I decided to play with it for the weekend. And as a Computer Vision enthusiast, I decided to learn about Mobilenet SSDs (Single Shot Detectors).
By using SSD, we only need to take one single shot to detect multiple objects within the image, while regional proposal network (RPN) based approaches such as R-CNN series that need two shots, one for generating region proposals, one for detecting the object of each proposal. Thus, SSD is much faster compared with two-shot RPN-based approaches.
What it does
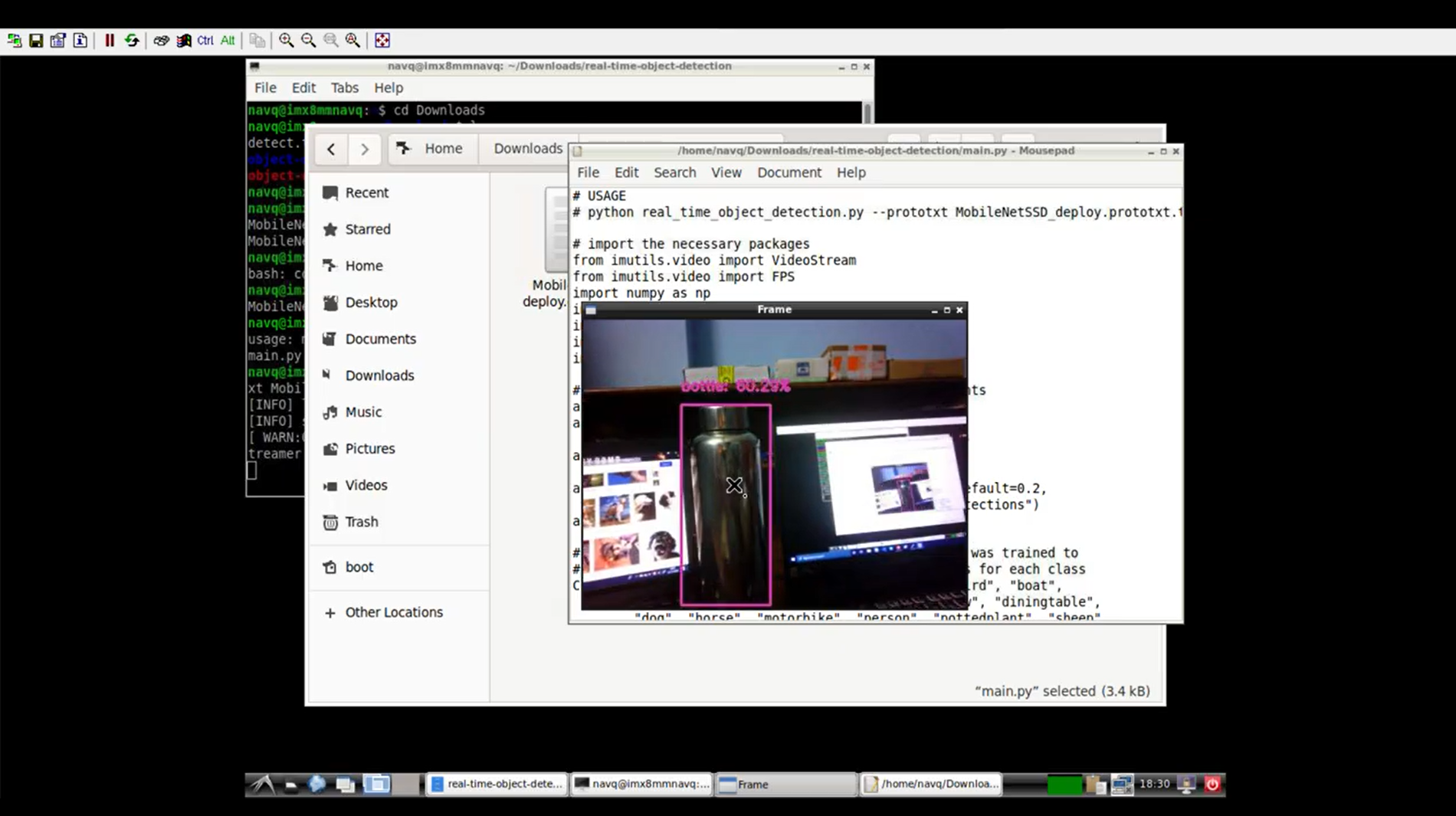
The Google Coral Camera attached to the NavQ board is able to detect objects like cat, dog, car, cow, monitor, bird, bicycle, aeroplane, bottle and a few more.
How we built it
I used the dnn module (Deep Neural Networks) of OpenCV for loading the caffe and prototxt files.
I found the MobileNetSSD_deploy.prototxt.txt and MobileNetSSD_deploy.caffemodel pre-trained weight files from the link
Challenges we ran into
Ohhhhh a lots of error and bugs. But now it works....
Accomplishments that we're proud of
It can successfully detect objects like cat, dog, car, cow, monitor, bird, bicycle, aeroplane, bottle and a few more.
What we learned
I learned a lot about Mobilenet Single Shot Detectors for object detection in Python and OpenCV.
What's next for OpenCV Object Detection using MobileNet Single Shot Detector
I will try to improve the system to be able to detect more objects.
Built With
- machine-learning
- navq
- object-detection
- python


Log in or sign up for Devpost to join the conversation.