-
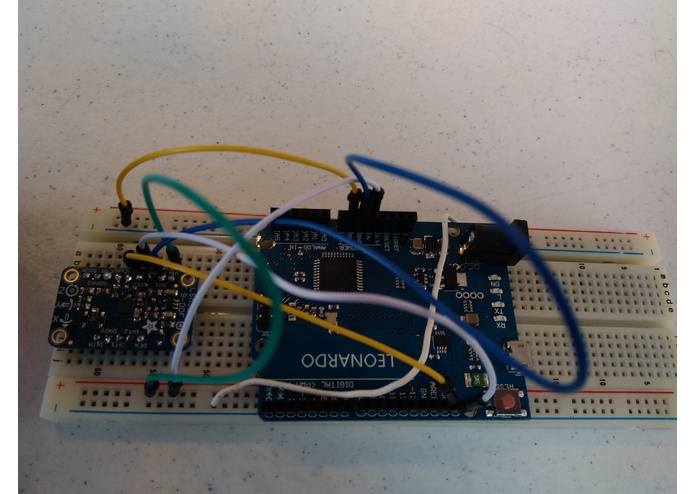
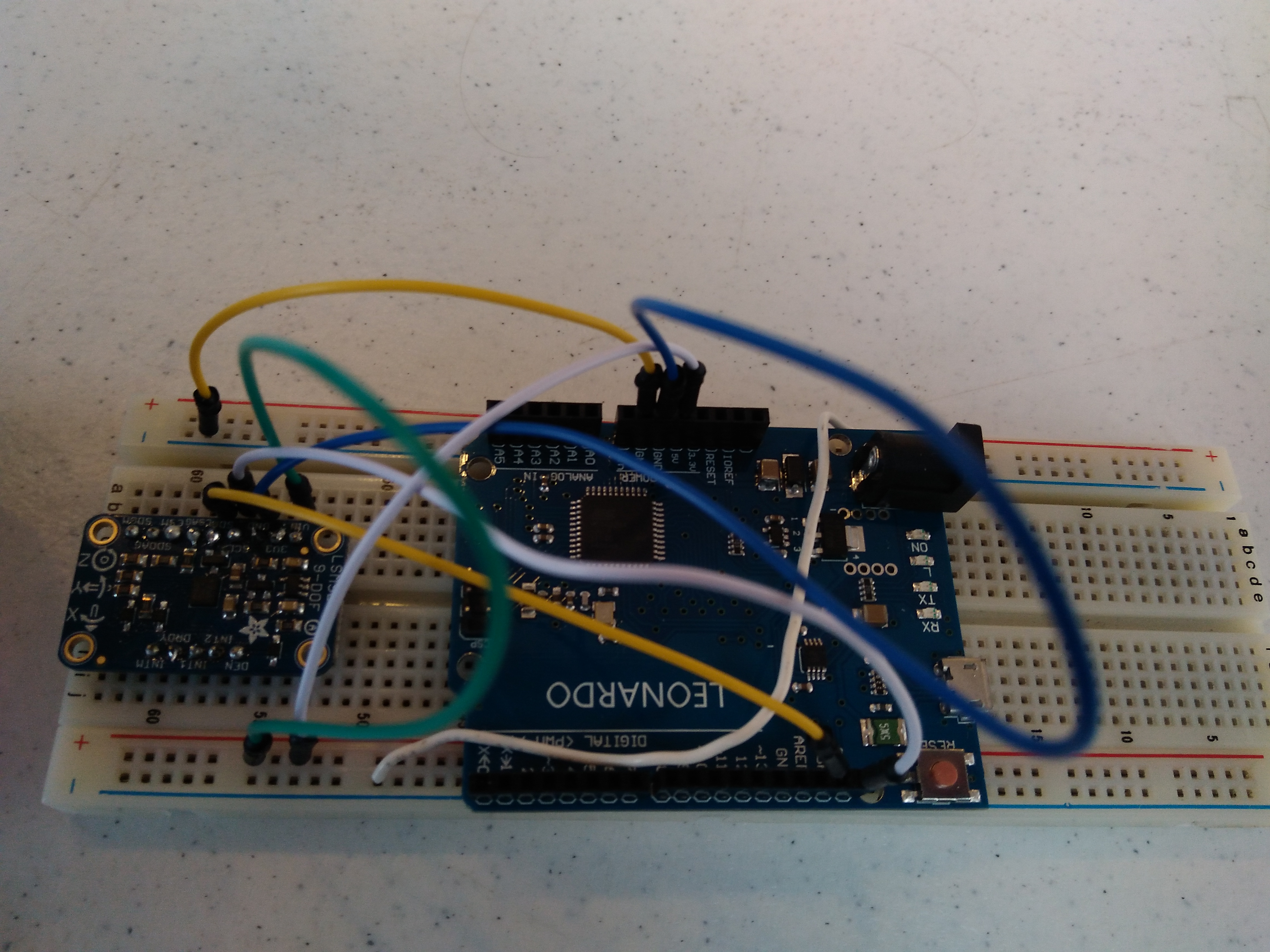
Circuitry(Arduino, IMU
-
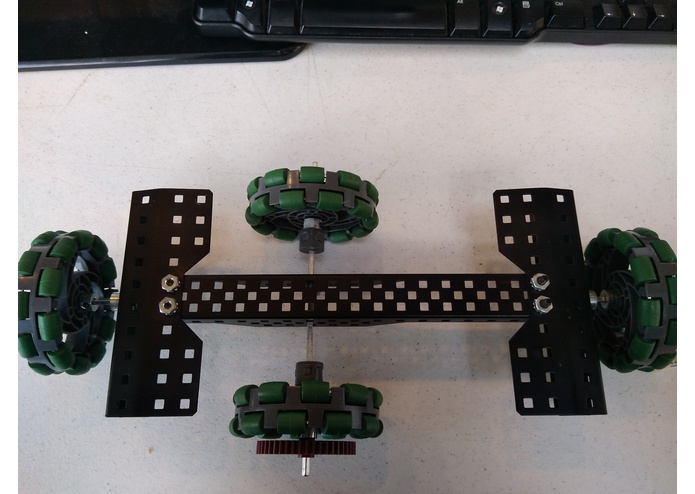
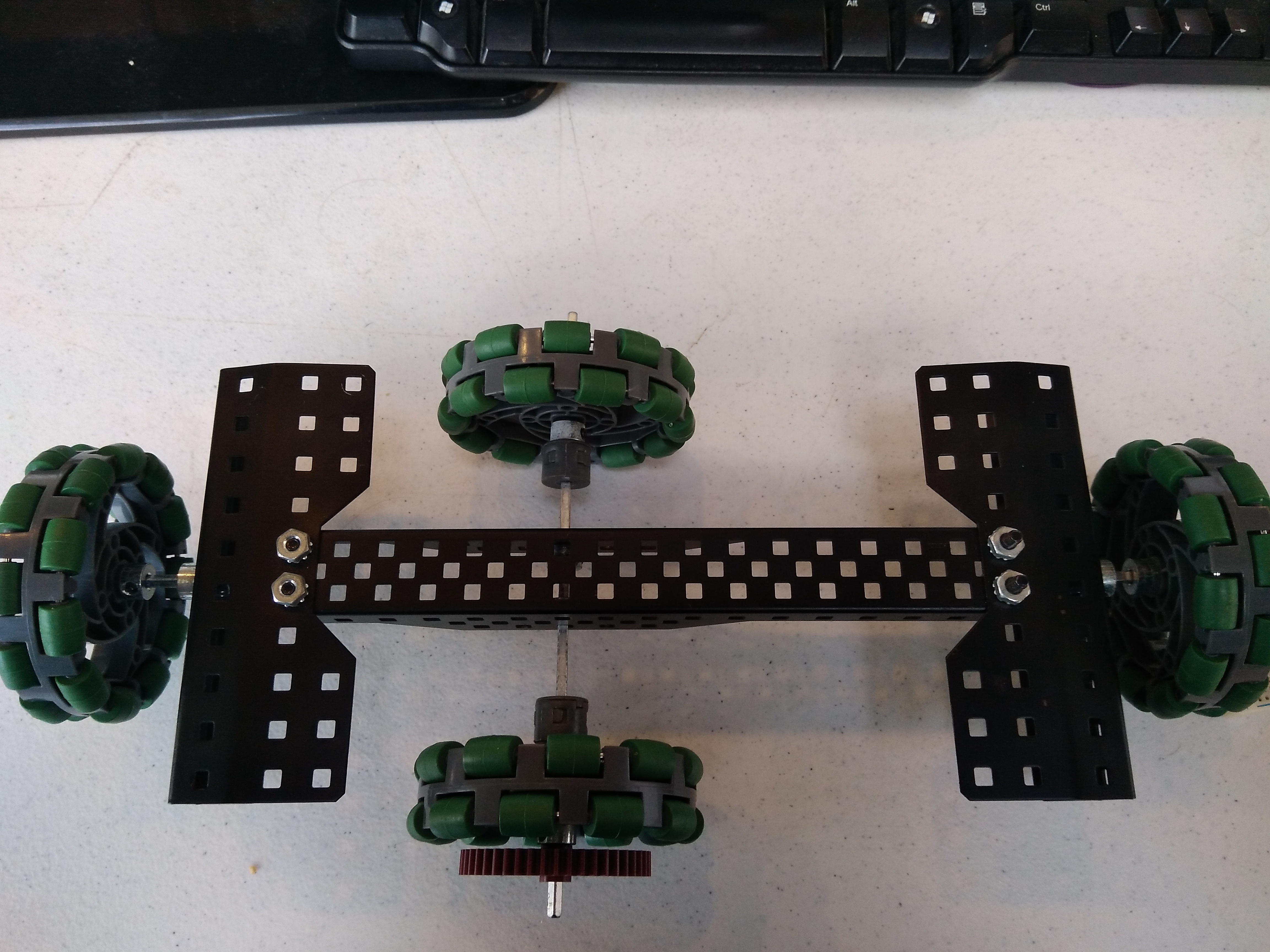
Frame
Inspiration
Right now there isn't a viable solution for moving around in Virtual Reality, in a natural way. The Motorized Skates seek to fix that problem by allowing you to walk in a limited physical space to explore an infinite virtual space.
What it does
The concept behind the skate is that there would be a set of sensors to track the user in the physical space. When they step forward, the skates will track where they are moving to and when the foot presses down on the ground, the motors will activate and pilot the user backwards toward their starting position.
How I built it
The current frame is built out of a vex frame and a set of 4 Omnidirectional wheels.The electrical components are on a breadboard and connect an Arduino to an IMU.
Challenges I ran into
I was planning on using a motor controller I had brought from home to safely control the motors, but I found that I didn't have the correct kind of wires to attach the motors. So I opted to just work on using the IMU in this prototype.
Accomplishments that I'm proud of
I'm proud that I was able to solder the IMU correctly and that I was able to achieve compass like functionality for the IMU based off the 3 axis Magnetometer.
What I learned
I learned that how to do some basic things inside of the Arduino editor and how to properly shift focus on a project when a piece doesn't function correctly.
What's next for Omnidirectional Motorized Shoes
I'd like to continue working on the device in my spare time. Maybe find a team of people to help me with some of the concepts I'm not familiar with. I also want to gather the necessary parts, get the motor controller attached to the device, and start writing the movement algorithm.
Built With
- arduino
- vex

Log in or sign up for Devpost to join the conversation.