-
-
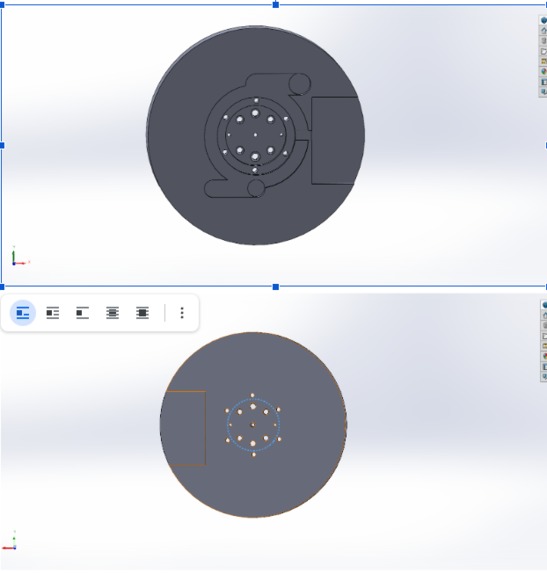
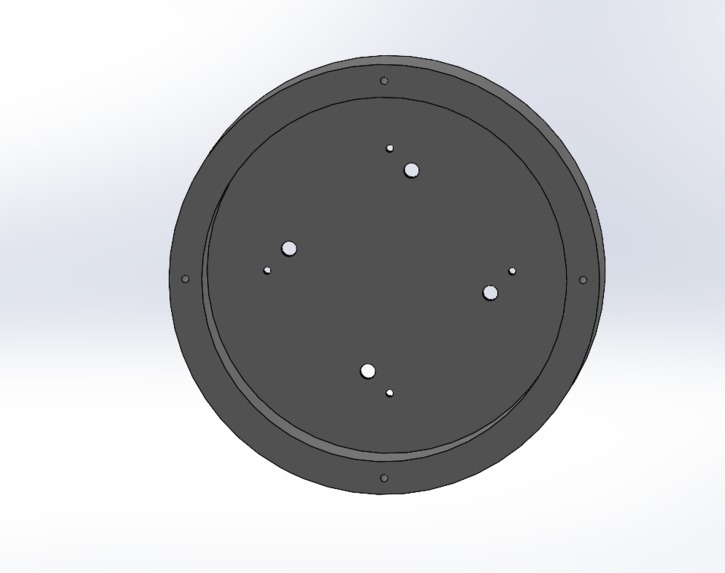
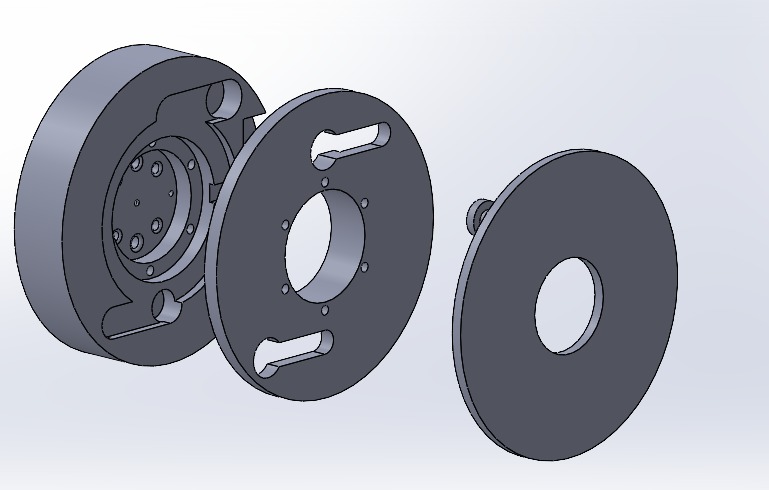
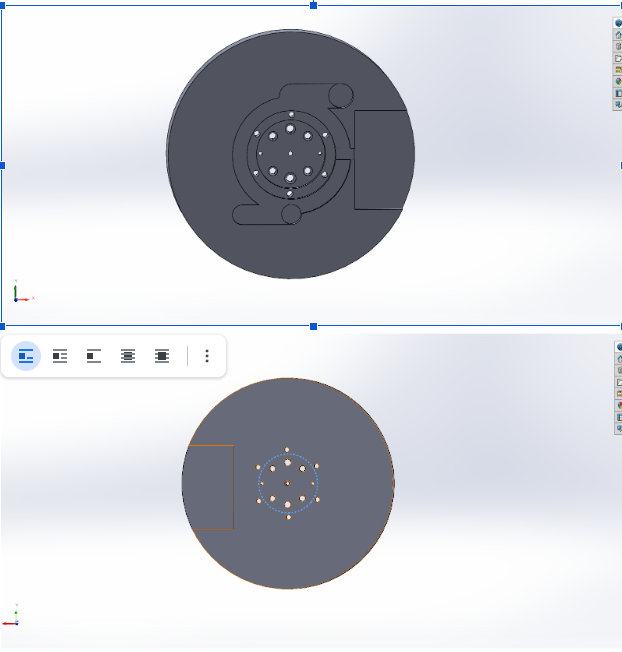
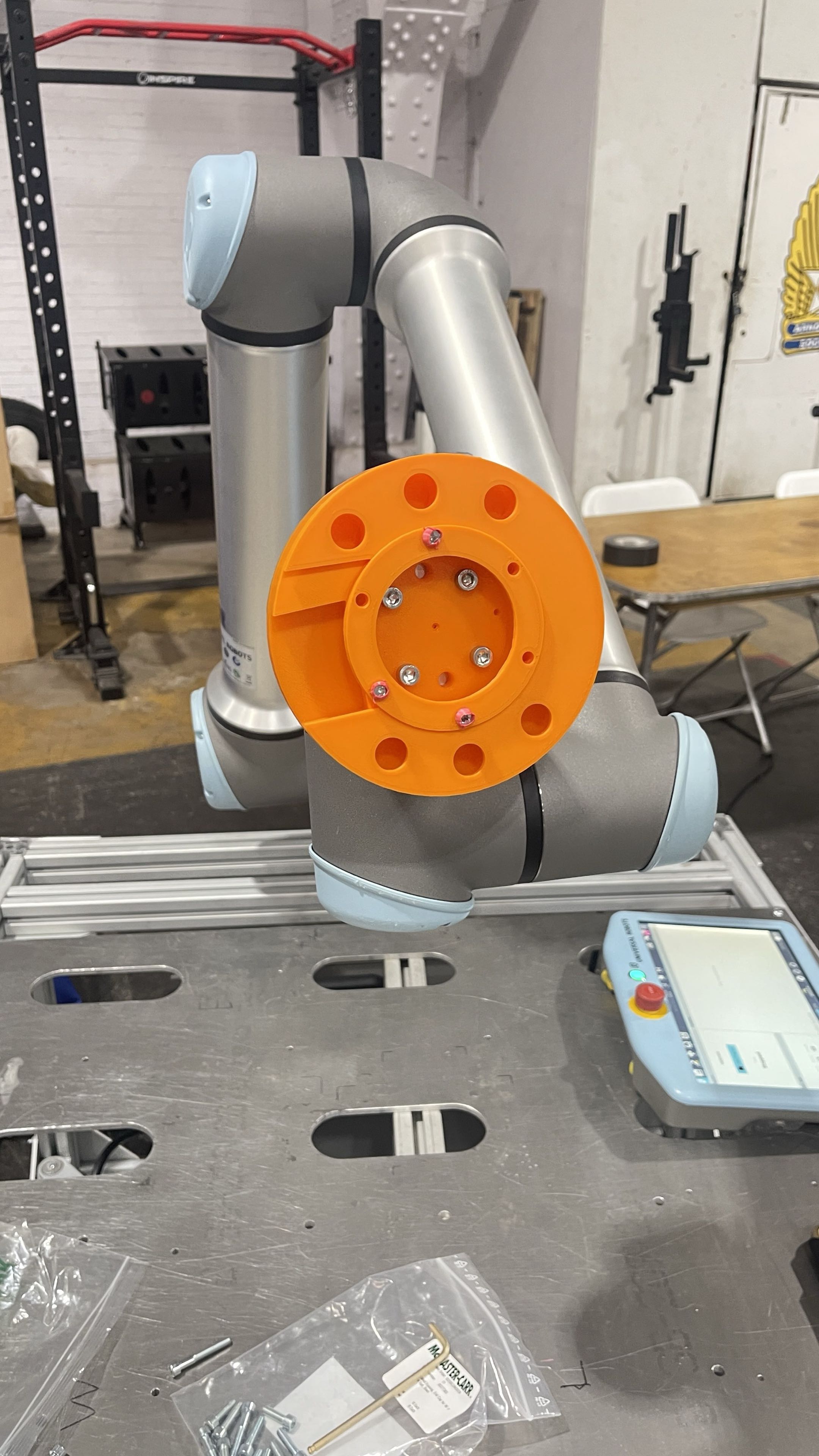
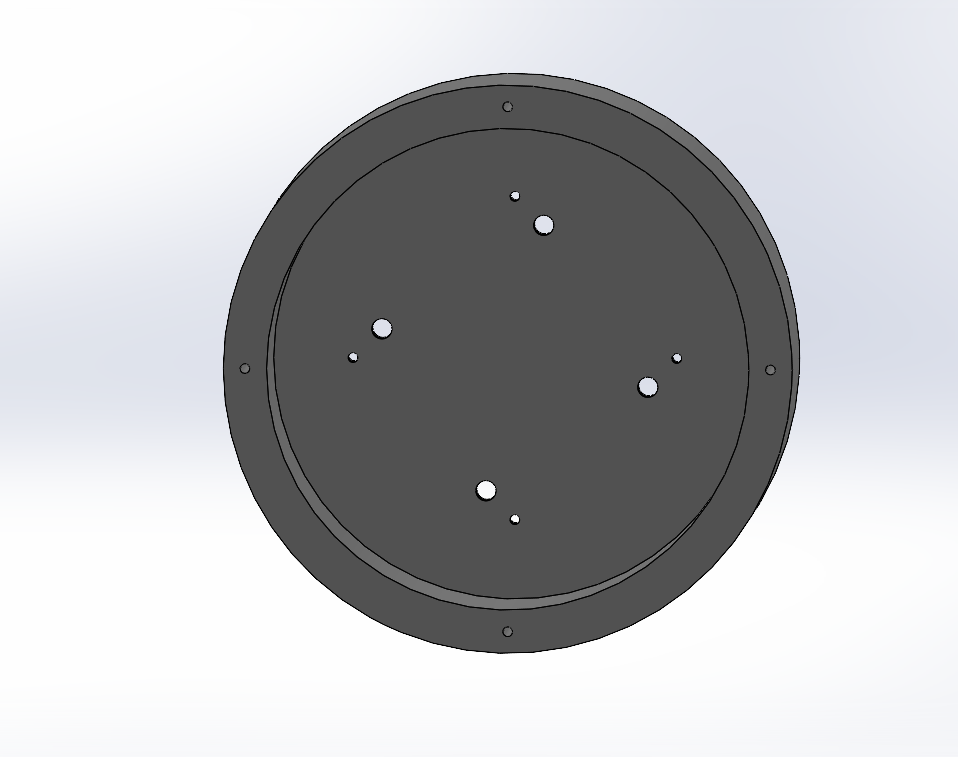
adapter plate connecting to the flange of the UR10
-
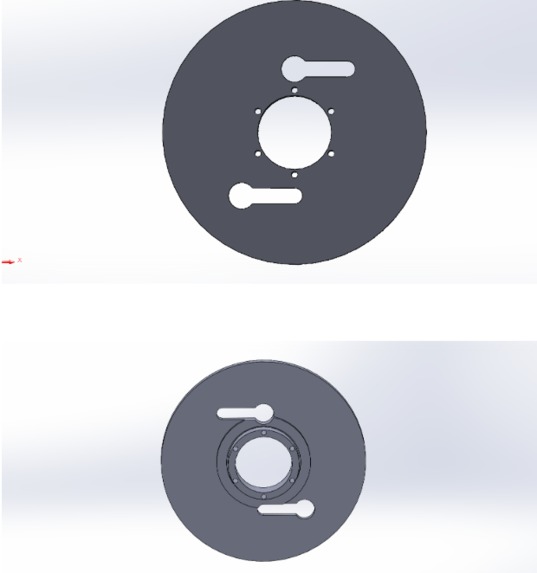
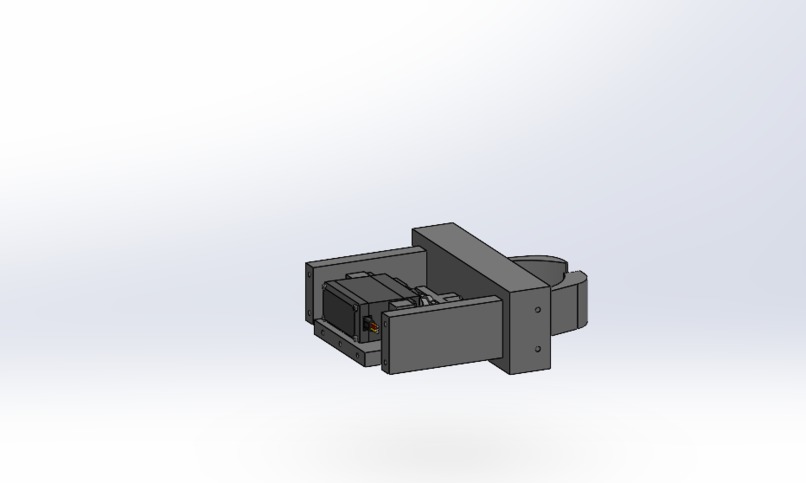
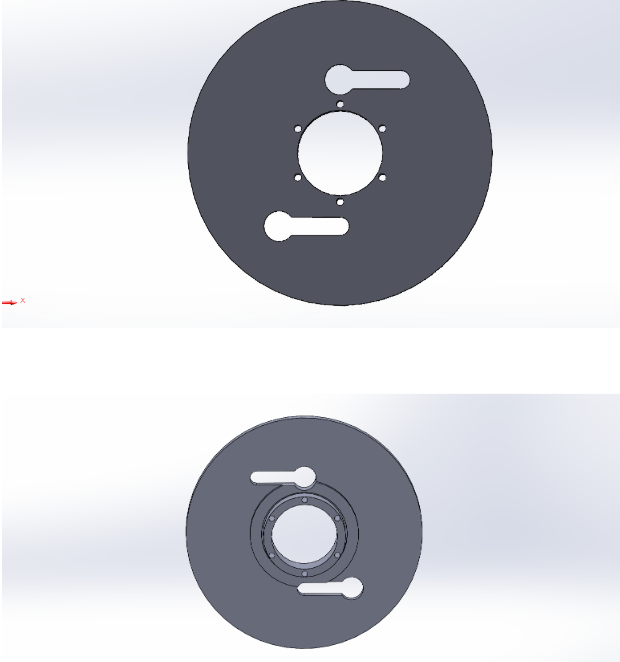
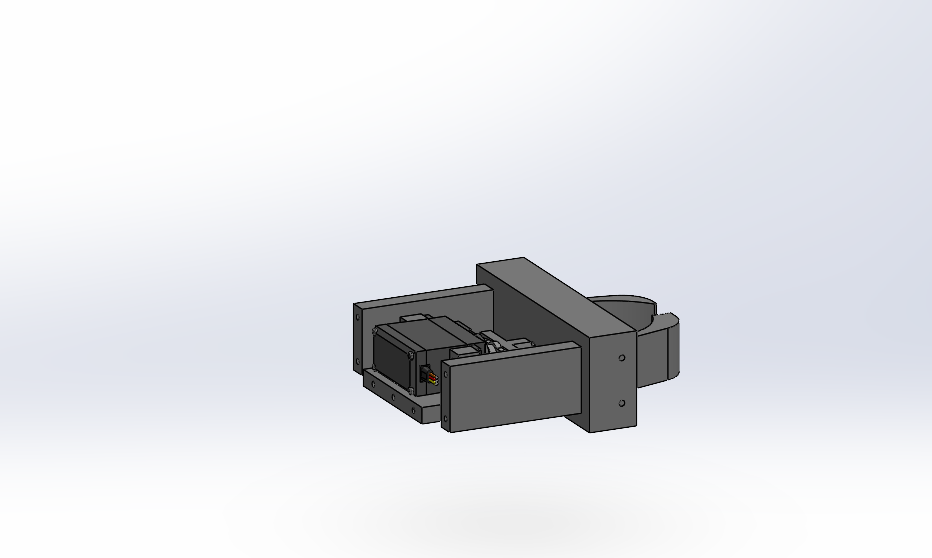
secondary locking mechanism and electro magnet locker
-
back plate of all the different tools to connect with electromagnet and the secondary locking mechanism
-
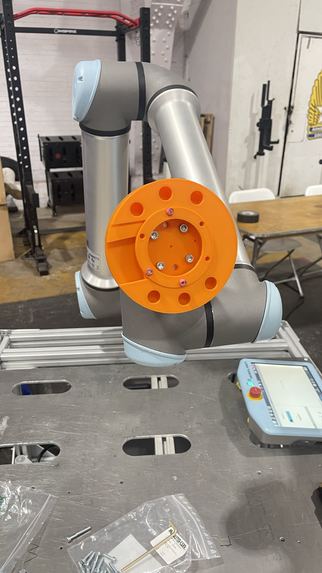
actual real world connect
-
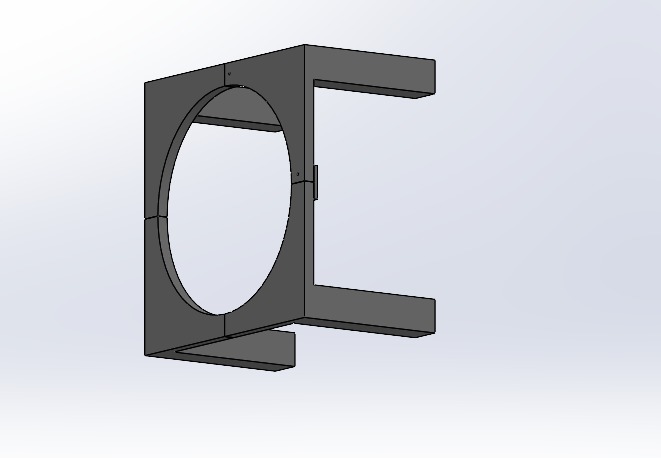
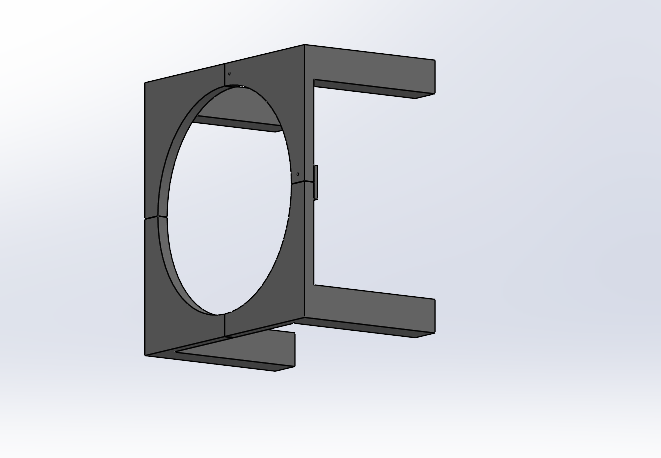
holder for all the tools
-
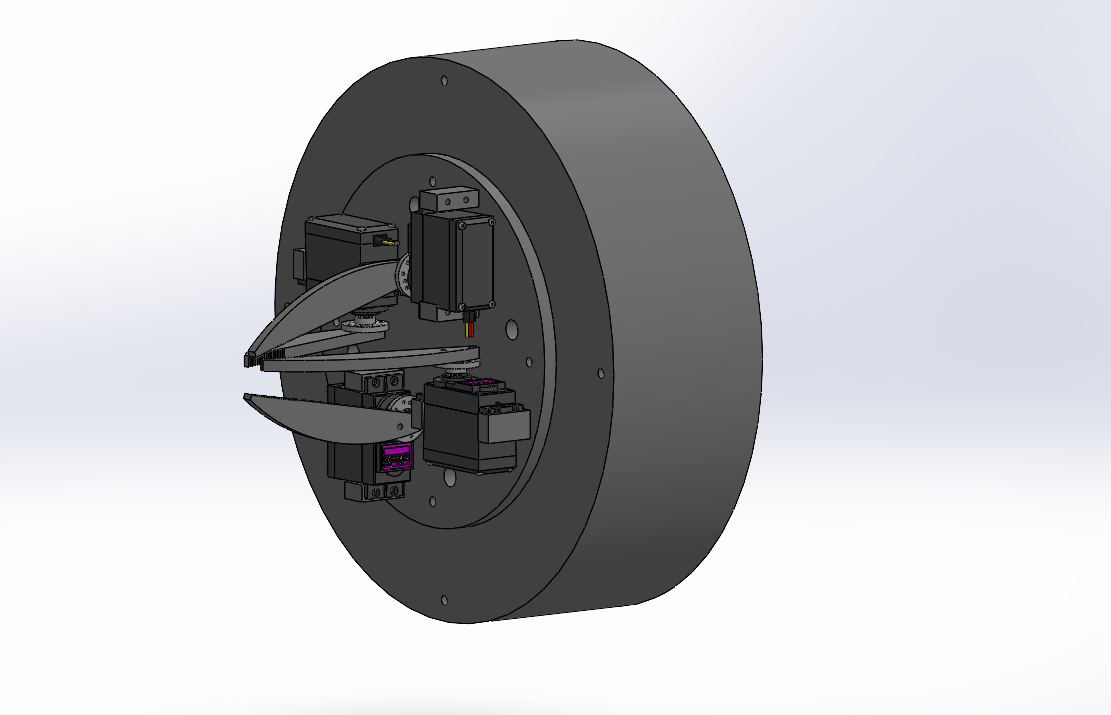
2 finger callaper
-
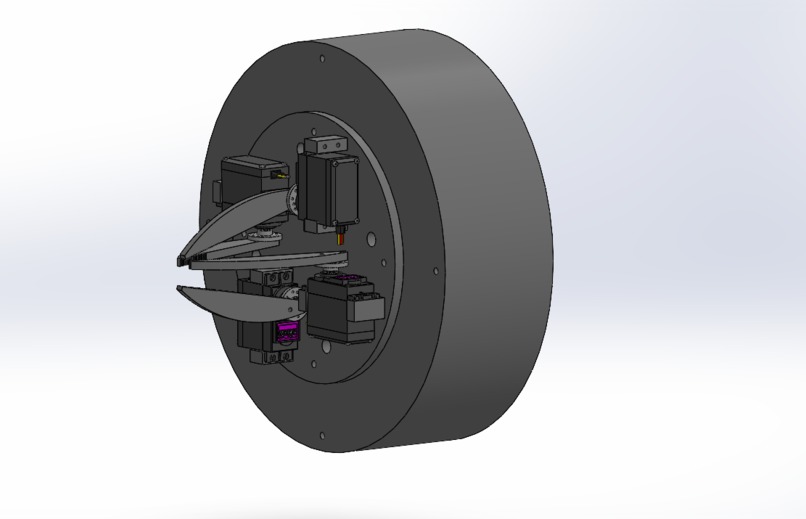
4 finger callaper
-
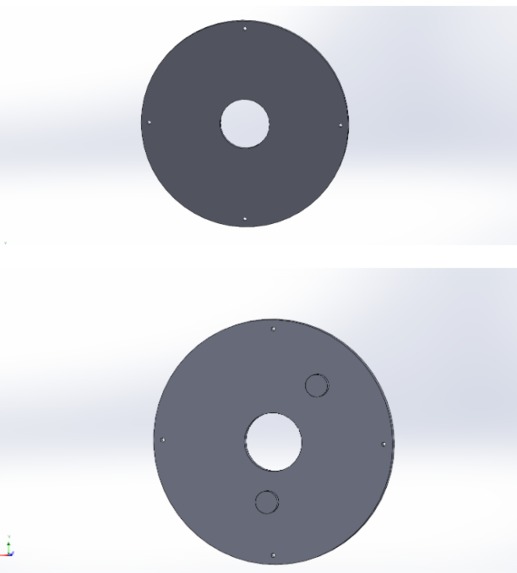
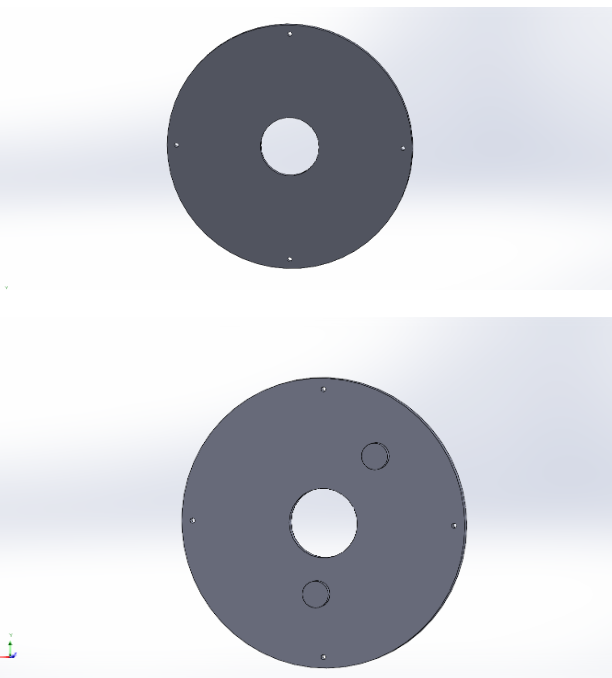
back plate of 2 and 4 finger callaper
-
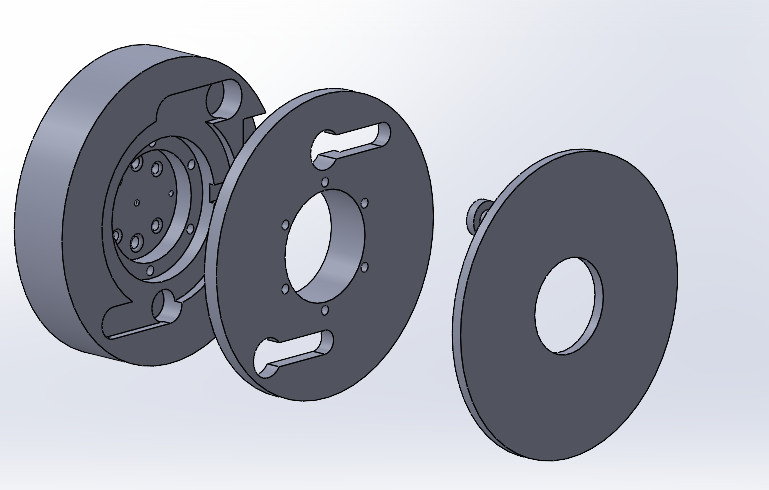
connection bewteen the mount and locking mechanism
Inspiration
The inspiration was the mindset that robots and robotic arms should be self efficient and shouldn't need human interaction besides the task they need to complete
What it does
Its basically a adapter plate which gets mounted directly to the robot flange, which holds a electromagnet and locking mechanism system . We also created a 2 finger grip and a four finger grip for versatility and for the demonstration of tool switching without any human interaction.
How we built it
First we designed the adapter plate in CAD using the schematic given to us by Ford. We made sure to include areas for the electronics. Simultaneously, we designed the 2 and 4 finger gripper tool. We ensured that the tool would be able to interface with the mount easily through the electromagnets. We used breadboards to prototype the electrical system. After 3D printing, we used nuts and bolts to assemble pieces and integrated the electronics.
Challenges we ran into
We ran into a lot of challenges. For one, we did not know the amount of space the system would take. We used rough dimensions to begin with. However, this resulted in wasted time for 3D printing, and we were not able to finish the system in time for demonstration. Another major challenge was the electrical system. We did not have much prior experience with ESP-32 boards, and were struggling for the entire hackathon on getting the servo motors and electromagnet to work with the ESP-32 boards. Finally, some the electronics that we planned to use was not available. For instance, permanent magnets, MG996R servos, and power supplies.
Accomplishments that we're proud of
We are proud of being able to work for extended periods of time with little sleep (and a lot of energy drinks). In addition, we gained massive experience with ESP-32 boards, servo motors, and electromagnets. We were persistent in troubleshooting, resulting in a partially working solution. On the design side, we learned to quickly pivot and iterate, often modifying our 3D printed parts with cardboard.
What we learned
As stated before, we learned to quickly iterate and pivot when our initial design doesn't work. We also learned how to work with the electrical systems we used. We also learned the value of perseverance in engineering and how to work together in a team.
What's next for Omni Robo Tool
We will finish the design on our own time, getting it 100% working. We will continue iterating as necessary. Once we are done, we will contact Ford with our design.

Log in or sign up for Devpost to join the conversation.