

Oculus Car
Inspiration
We're a group of student from Northwestern University who are very interested in robotics. 3/4 of our team is part of Northwestern's Robotics Club, where we have worked together on robotics projects in the past. We wanted to try to integrate a small robot into a hack for this hackathon to do something fun and interesting.
How it works
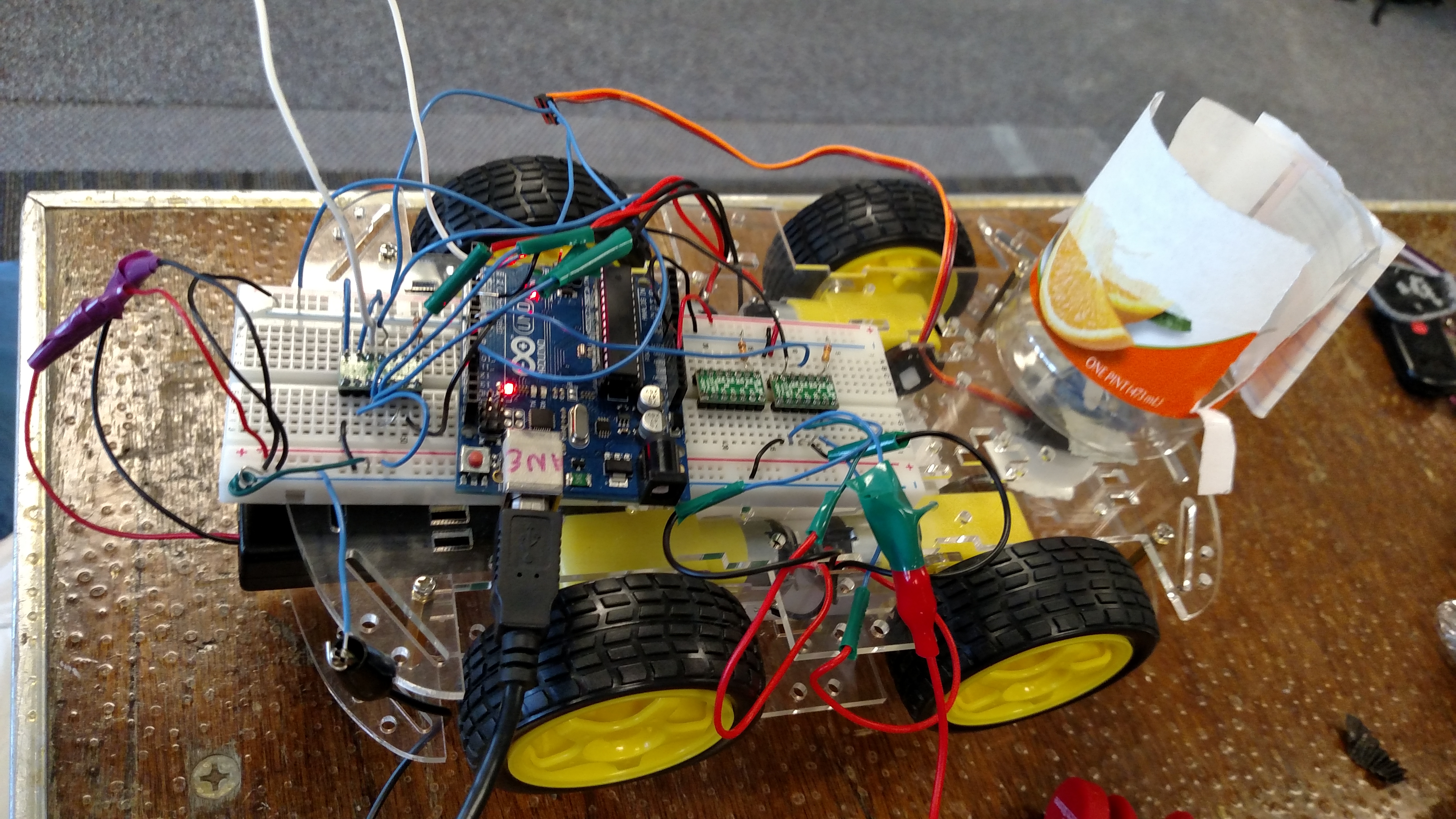
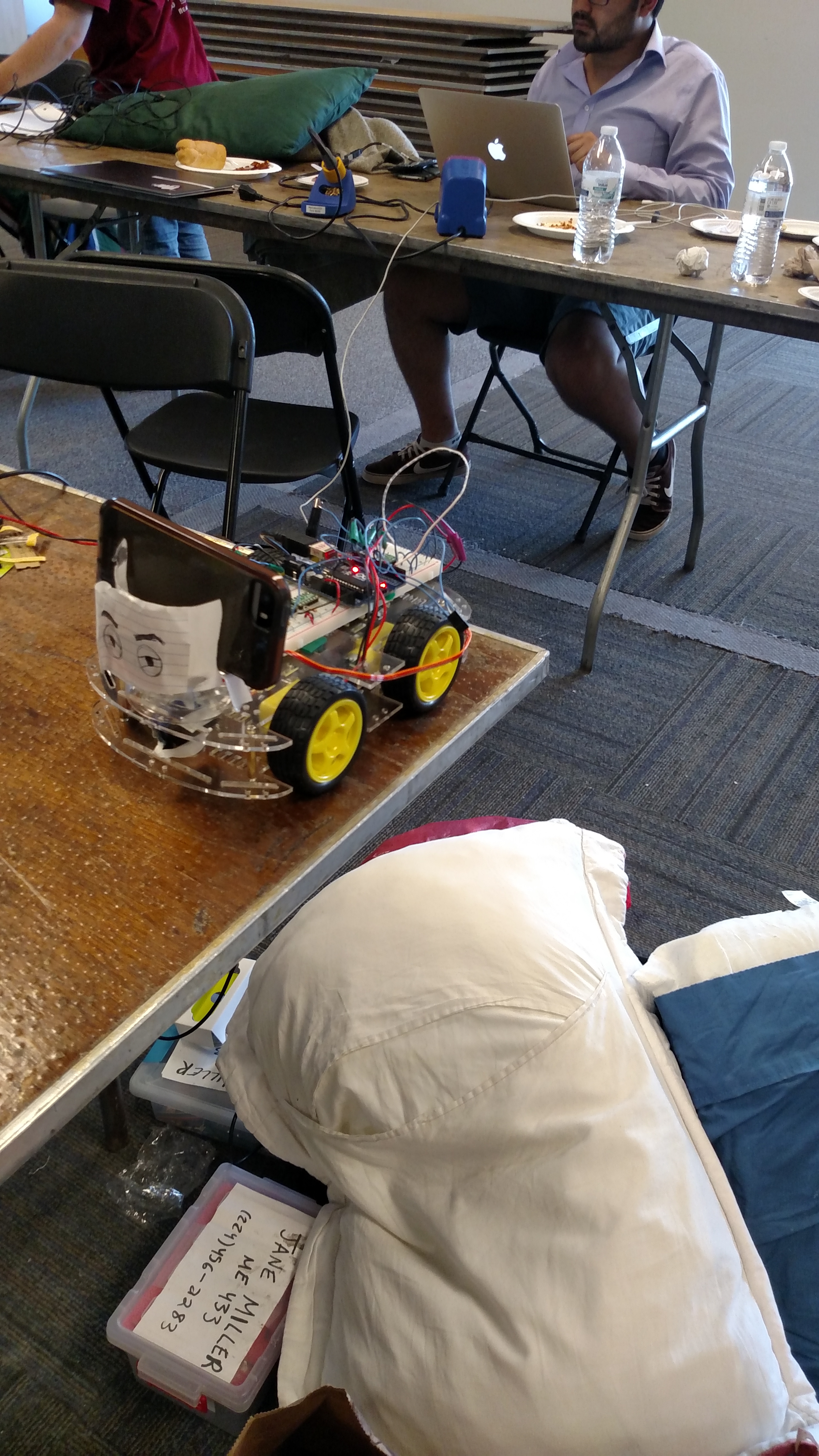
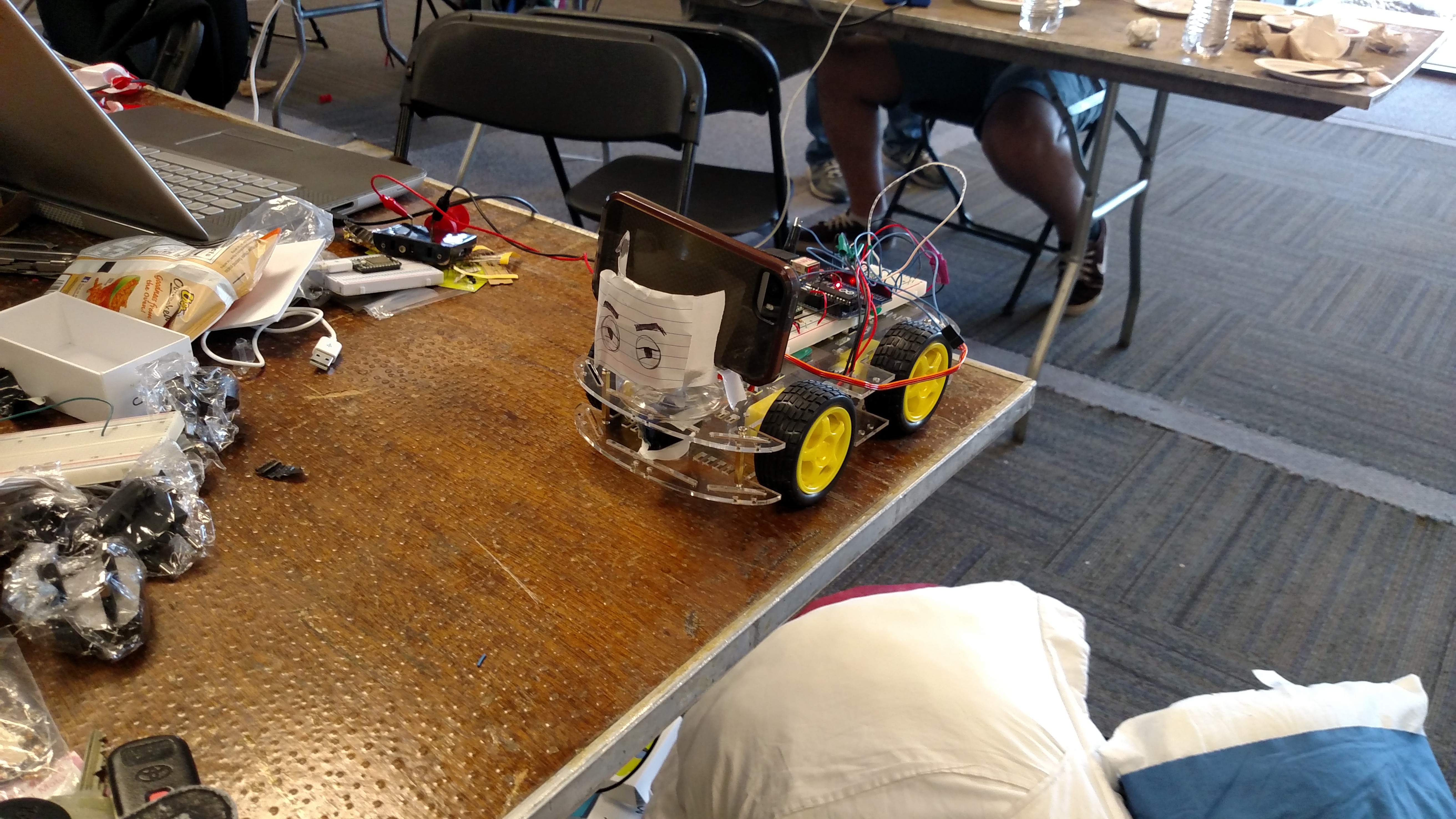
The driver of the Oculus Car wears an Oculus Rift and sits at a computer with a Leap Motion connected. The driver looks around with the Oculus Rift to rotate a servo on the robot, which holds an Android phone streaming video over Wifi to the Oculus. The driver uses a set of hand signals and gestures with the Leap Motion to drive the robot in different directions and at different speeds. The Leap Motion and Oculus data are translated to "commands" for the robot, sent to a server using Flask and then to the Android phone which then relays these commands to the Arduino Uno which drives the robot.
Challenges I ran into
Major challenges for this project were communications between all of our hardware (especially Android to Arduino) and collecting head motion data from the Oculus.
Accomplishments that I'm proud of
I'm really proud of the combinations of hardware we managed to integrate, the large range of commands our robot can receive and the exciting, fun goals of our project.
What I learned
A major lesson we learned through this project was to investigate the types of communication used by different hardware and the desired softwares ahead of time, as integrating multiple platforms is often difficult and this is where our greatest challenges have been.
What's next for Oculus Car
Next, we'd like to see Oculus Car fully functional and driving around Northwestern's campus



Log in or sign up for Devpost to join the conversation.