Inspiration
We were inspired by Dr. Durgin's talk yesterday on wireless RFID localization. We thought it can be used as an effective method for finding the item ID, size, shape, segmentation, etc., of various cases.
What it does
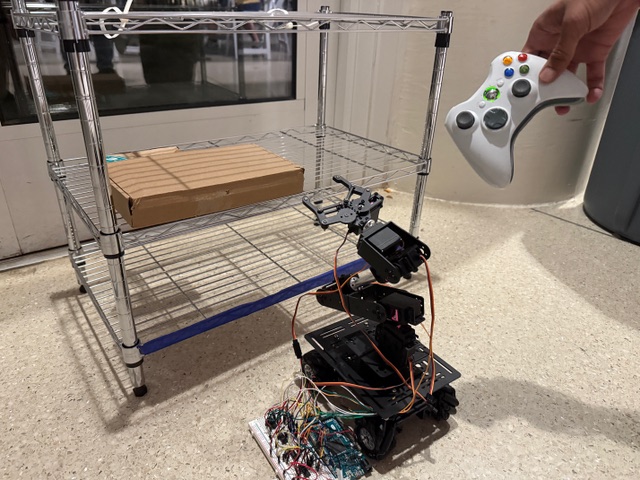
The PoC we made provides 2D localization using two Bluetooth low-energy beacons, and a receiver, all using ESP32s to connect. We also provide an easy snap-on snap-off geometry for hanging an RFID tag/BLE receiver on the box
How we built it
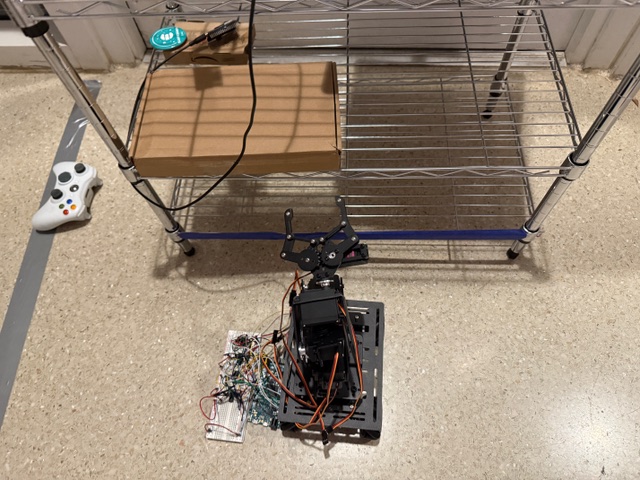
We built it using 3 ESP 32s, a receiver BLE, and 3 beacons. Based on the RSSI of the receiver from each of the stations, we can triangulate the signals and provide a localization estimate. We propose that UWB radar will have much higher accuracy than the BLE PoC we are showing, however.
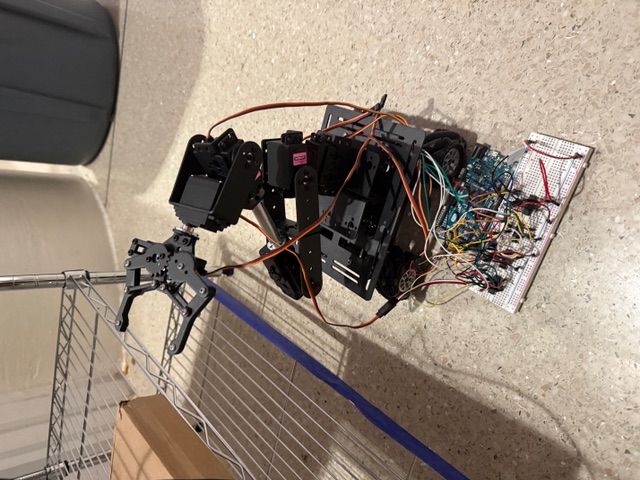
We also built a prototype of the robot using 4 DC motors for chassis of the car and 6 servo motors for a robot arm with 5DoF and a grasper
Challenges we ran into
We needed many Bluetooth devices, as well as we were working on CV models to detect the barcodes when we were inspired by the wireless communication idea from the speakers.
Accomplishments that we're proud of
We're proud that we were able to use what the speakers presented, and get inspired by that. We are also proud that we learned much more about Bluetooth and WiFi communication protocols
What's next for Occluded Localization and Retrieval through Wireless Comm
RFID/UWB Radar for more accurate localization
Built With
- arduino
- esp

Log in or sign up for Devpost to join the conversation.