Inspiration: Part of building an AGV (automated guided vehicle) for closed spaces (inside buildings, hospitals, etc.)
What it does: Helps the AGV see
How we built it: Since the AGV Environment is very controlled, we could get rid of a lot of labels which helped make the model simpler and lightweight; Leveraged a pre-existing model (caffemodel) for the same.
Challenges we ran into: Finding a suitable model for transfer learning. Suitable model implied something that was computationally light, had low latency, but acceptable accuracy scores
Accomplishments that we're proud of: Passed all the situational tests, and dry runs. Low latency, and low computational requirements: Runs successfully on a Raspberry Pi 5 4GB RAM
What we learned: Computer Vision, Single Shot MultiBox Detector
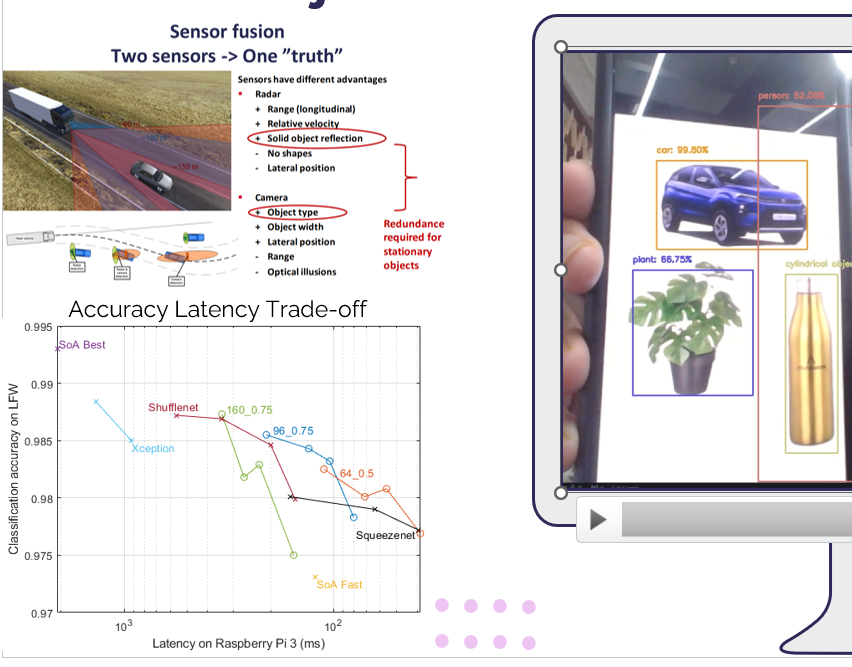
What's next for Object Detection for Delivery Vehicles: Cross verifying the information the real time information with proximity sensors. Essentially having vision validate proximity sensor readings and vice versa, to get accurate obstacle detection. (2 Sources -> 1 Truth)

Log in or sign up for Devpost to join the conversation.