-

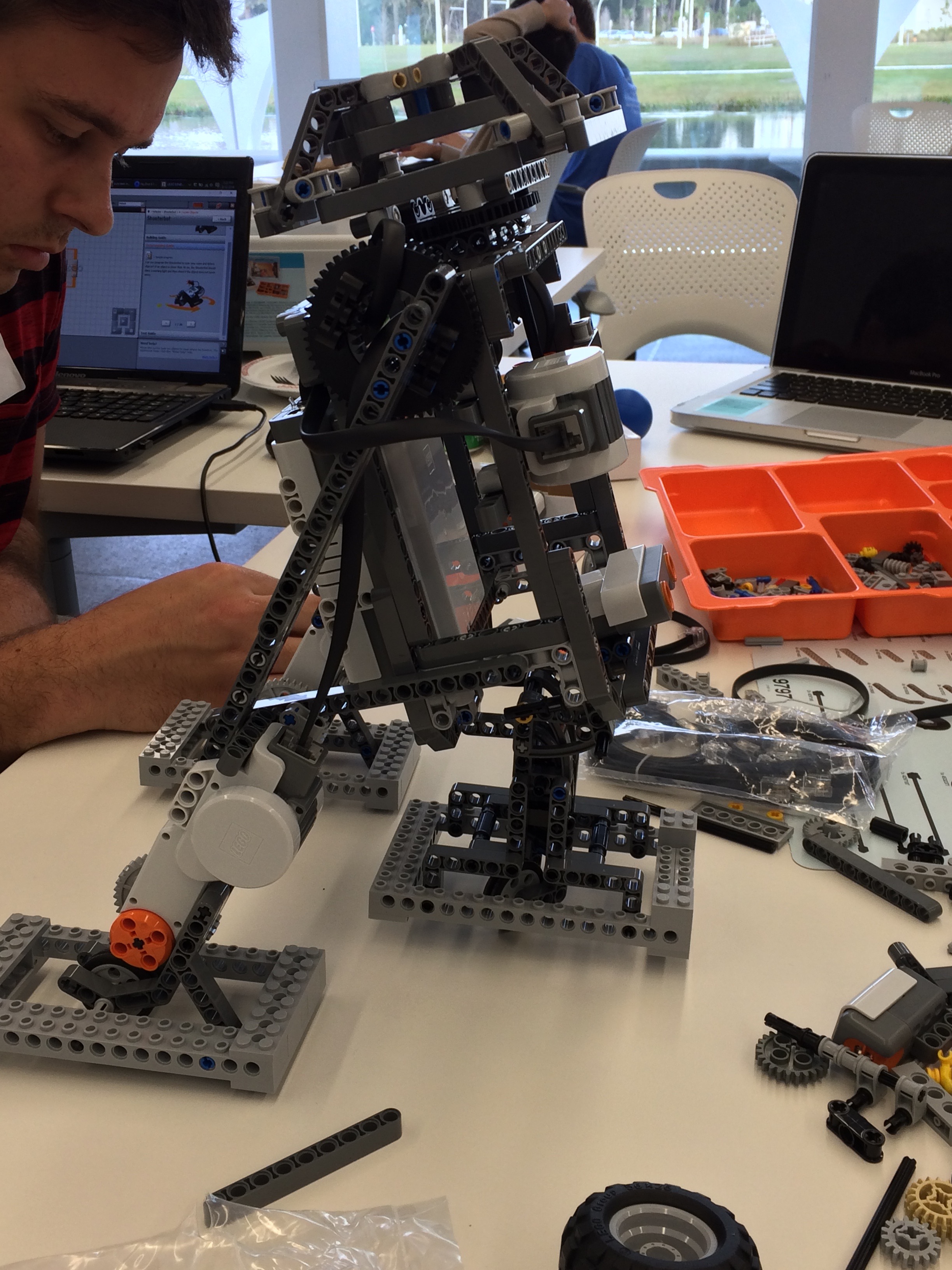
R2D2 being assembled
-
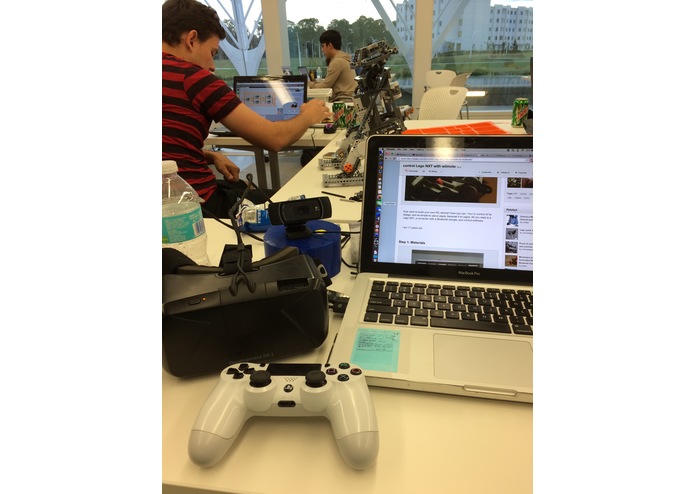
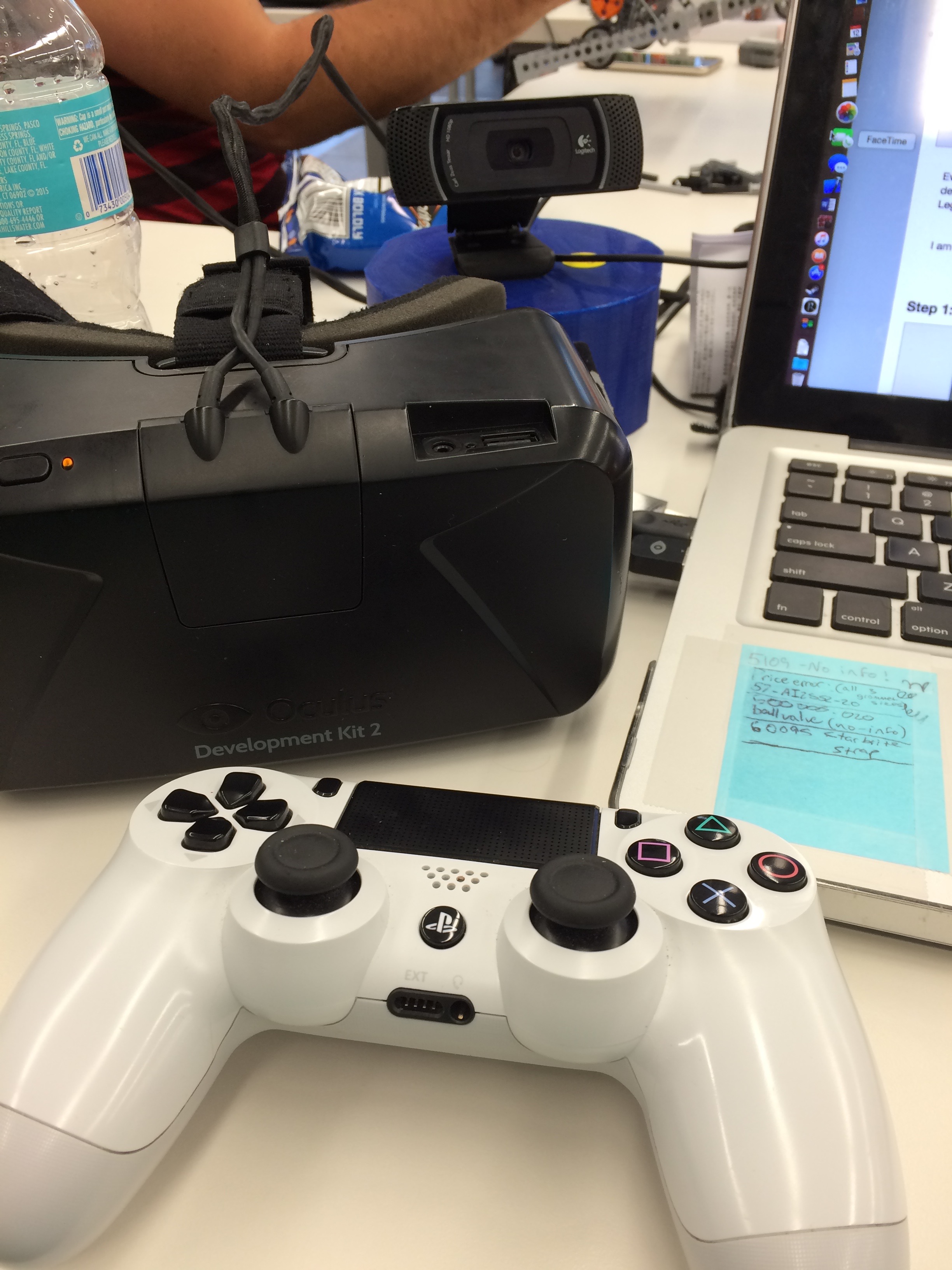
Attempting multi-platform communication
-
Attempting multi-platform communication

Inspiration
The fact that all of us are fans of Star Wars and that Kevin, Eric, and Paul are all on the Robotics Club officer team gave us inspiration to build R2D2.
What it does
This R2D2 Unit autonomously navigates its environment using an ultrasonic sensor to confirm its position and adjust the position of the robot. Avoiding walls isn't all that this robot can do. There is also a User controlled section using a PS4 controller to drive R2D2 around the floor.
How we built it
We Built R2D2 using Lego Mindstorms kits, Mindstorm NXT motor controller, as well as Java and Bluetooth capabilities for connections.
Challenges we ran into
We ran into many connectivity issues, such as Bluetooth and Java incompatibilities. Using Raspberry Pi posed issues of its own. Connecting a WebCam proved to show a very low framerate. The Oculus had issues with library support through Java, and especially the Raspberry Pi platform.
Accomplishments that we're proud of
Building a realistic scale model of R2D2 and getting an autonomous code running is an accomplishment worth notice.
What we learned
We learned that not all libraries are compatible with all platforms and errors are very common when trying to learn and adapt as you go.
What's next for NXT R2D2
Full Oculus support as well as a fully 3d-printed shell are next for R2D2. Over the coming weeks we plan to 3D print a full shell and support all Bluetooth communication.




Log in or sign up for Devpost to join the conversation.