
Inspiration
Quadcopters are awesome. Using souped up parts to make that quadcopter from scratch is even more awesome but equally challenging.
What it does
Like other quadcopters, it flies through the air like a majestic bird. Except this bird can fly ~ 60 mph, and up to a kilometer far away.
How I built it
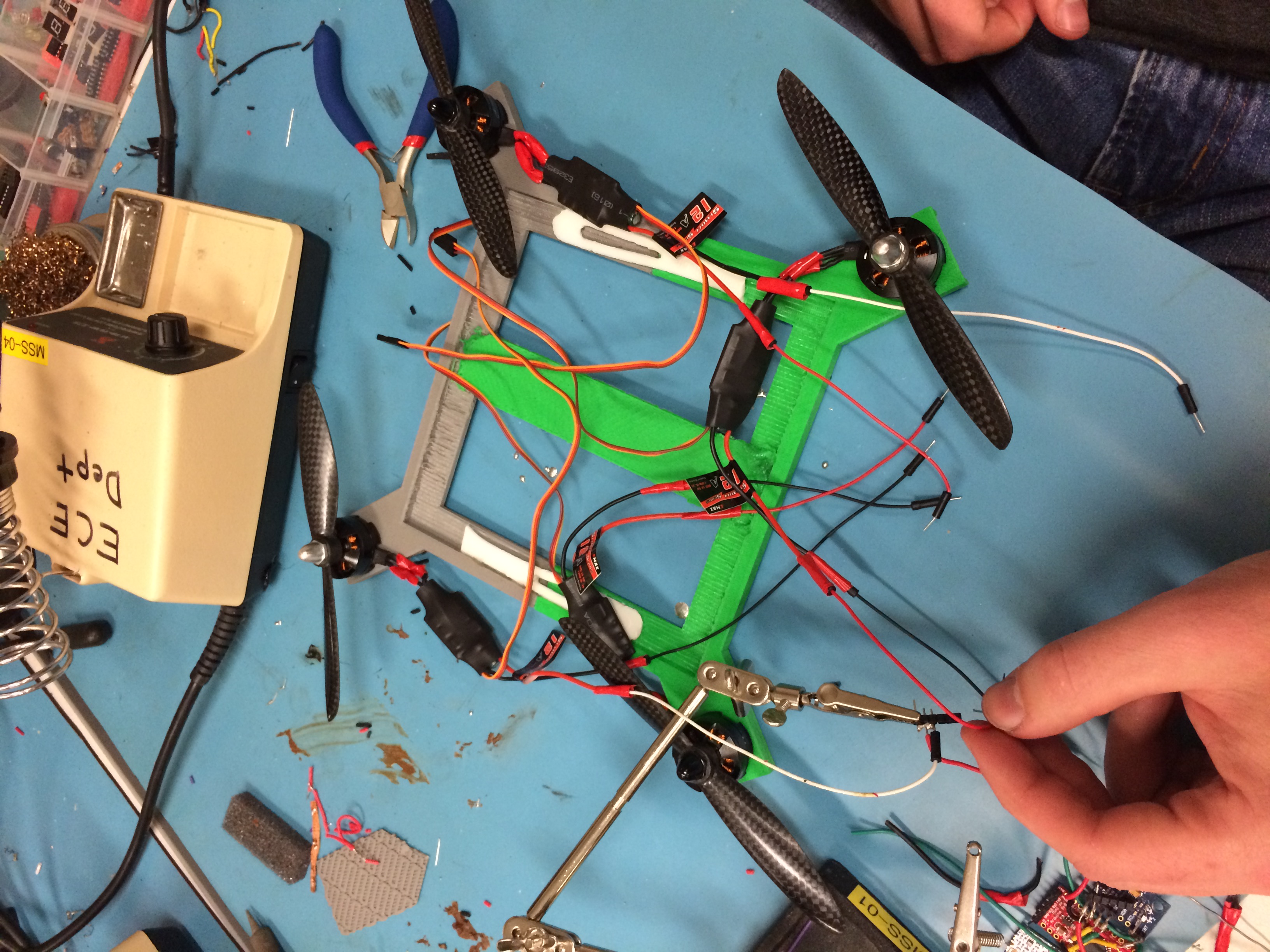
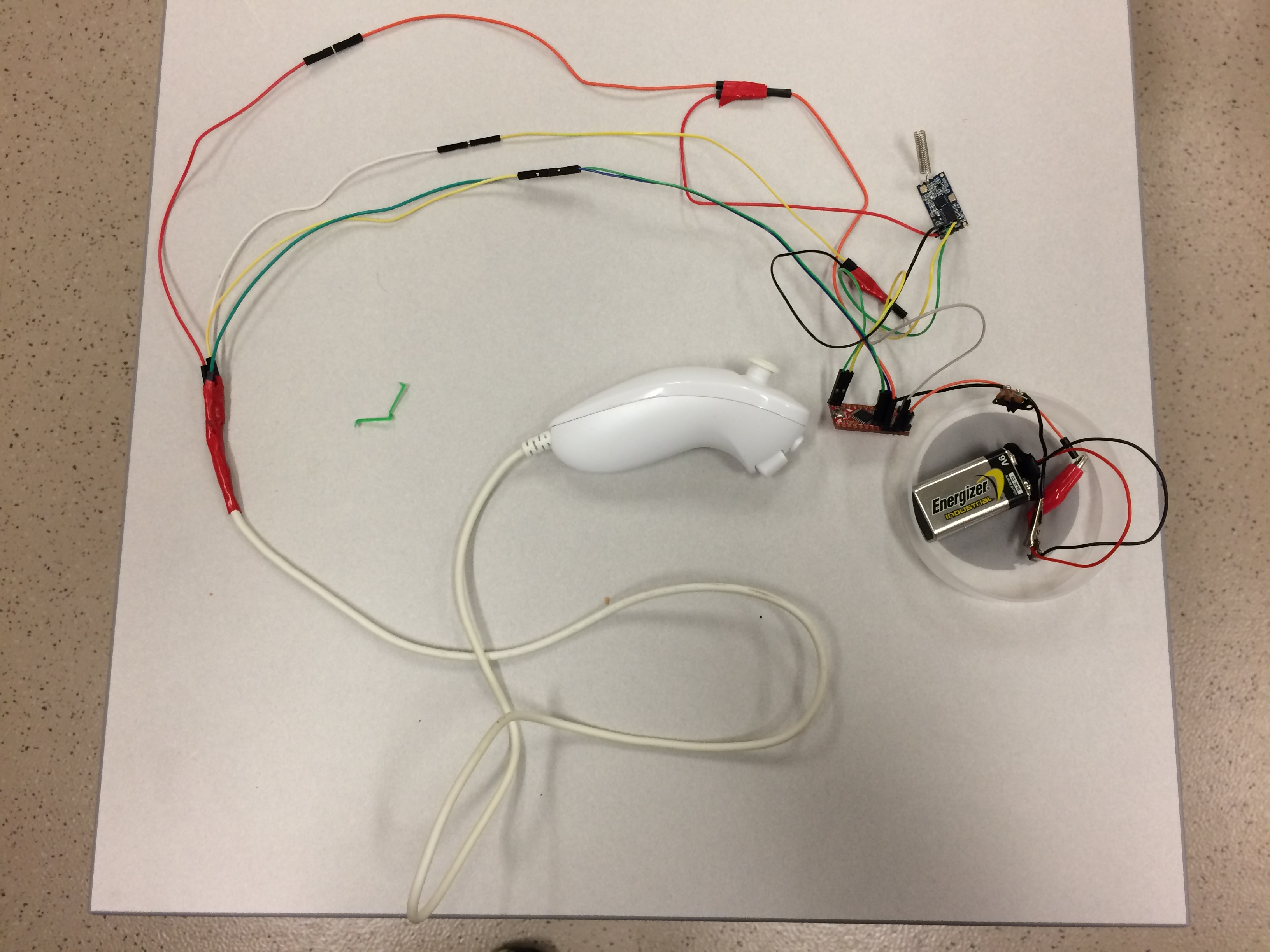
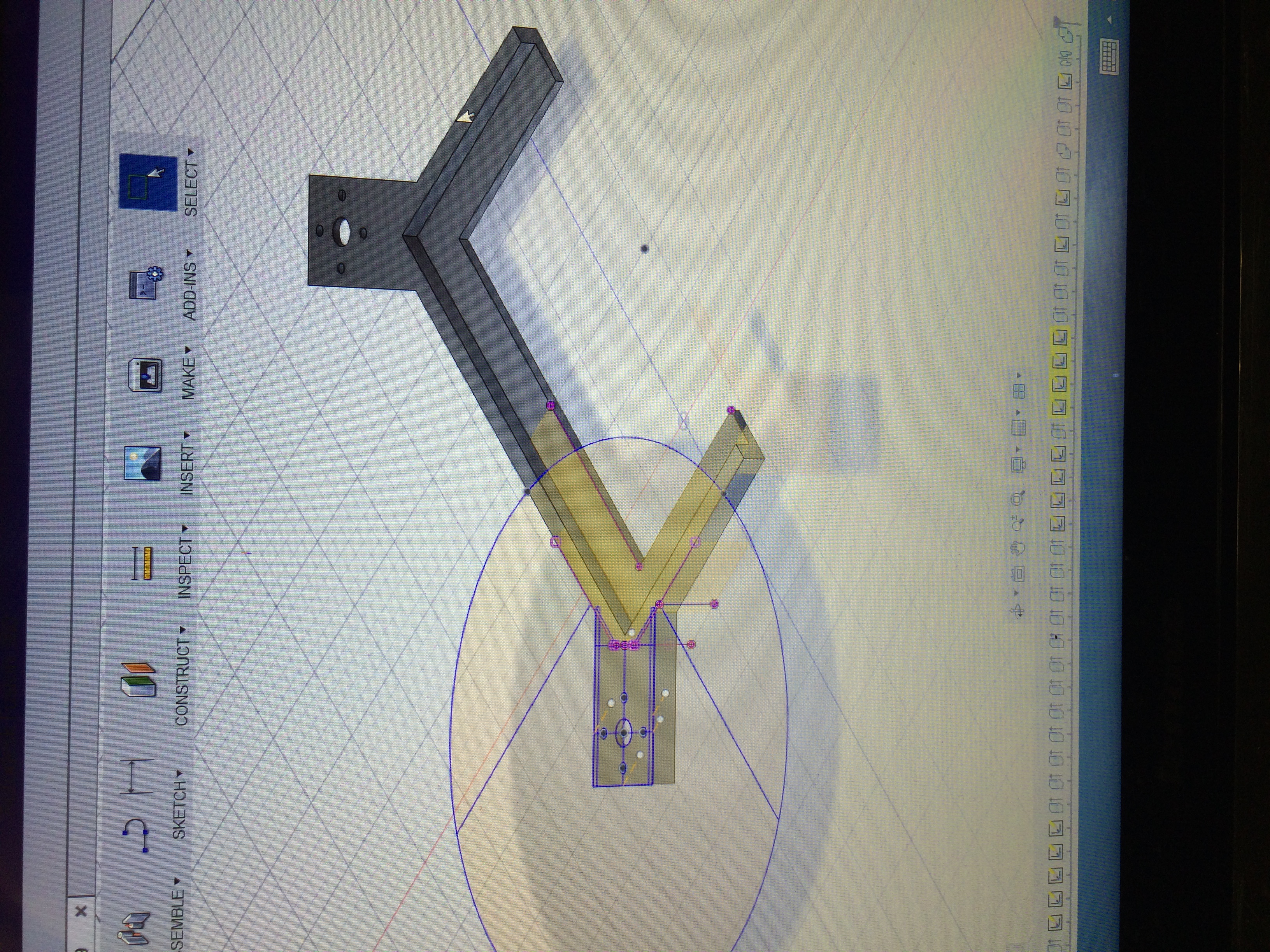
We used Fusion 360 to design the chassis from scratch, and dissected a wii remote to communicate directly to an arduino. That arduino uses long-range radio signals to communicate with a second arduino that processes flight information (using a gyroscope) and controls flight itself.
Challenges I ran into
3D printing the chassis took multiple long-time iterations, ended up printing two halves that we had to assemble.
Accomplishments that I'm proud of
The fact that we've custom built a quadcopter instead of just buying one. Plus, we can use multiple input sources to control it if we wish too.
What I learned
Lots of soldering, circuits, CAD
What's next for Nunchuck Quadcopter
After working on the stabilization algorithm, we can expand our input sources for flight control to include any custom controller we like, or using voice control. If we had more time, we would have also attached a camera in order to see a first hand view of where it is flying
We were also looking into the Fitbit API in order to use gps data from a run to map a course for the quadcopter to follow
(team # 55)
Built With
- 3dprinting
- arduino
- c++
- emax-2204
- wii-nunchuck



Log in or sign up for Devpost to join the conversation.