Introducing Nuisance
Inspiration
When prompted with the concept of Useless Inventions, and the slight delay from procrastinating the brainstorming process of our idea, we suddenly felt very motivated to make a little friend to help us. Introducing Nuisance. A (not so friendly) Bot that will sense when you have given him your phone. Promptly running away, and screaming if you get too close. An interesting take on the game of manhunt.
What it does
Nuisance detects when a phone is placed in its possession. It then embarks on a random journey, in an effort to play everyone's favourite game, keep away. If a daring human approaches before Nuisance is ready to end the game, he screams and runs away; only a genuine scream of horror stands a chance of reclaiming the device. Adding a perfect touch of embarrassment and a loss of dignity.
How we built it
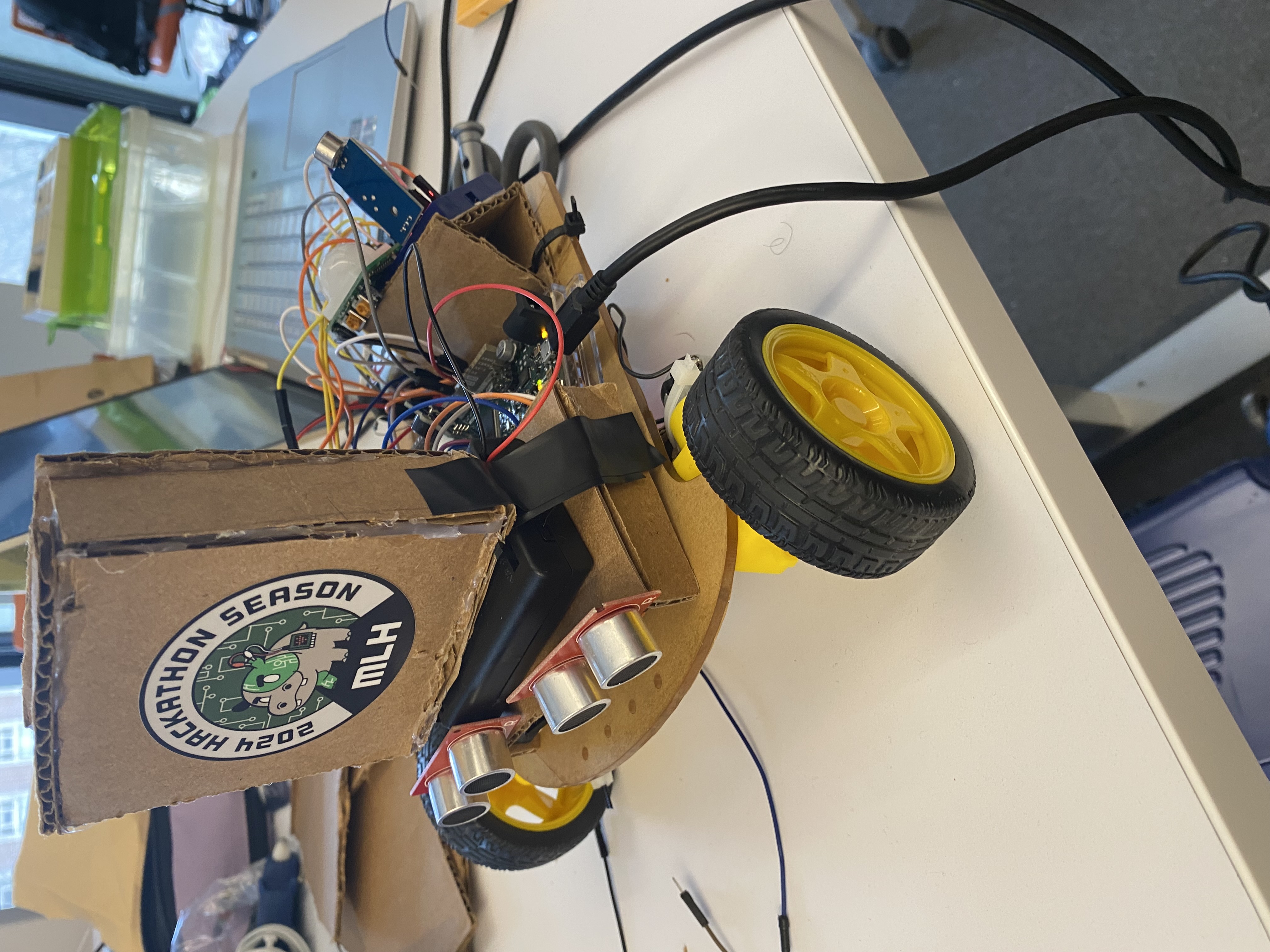
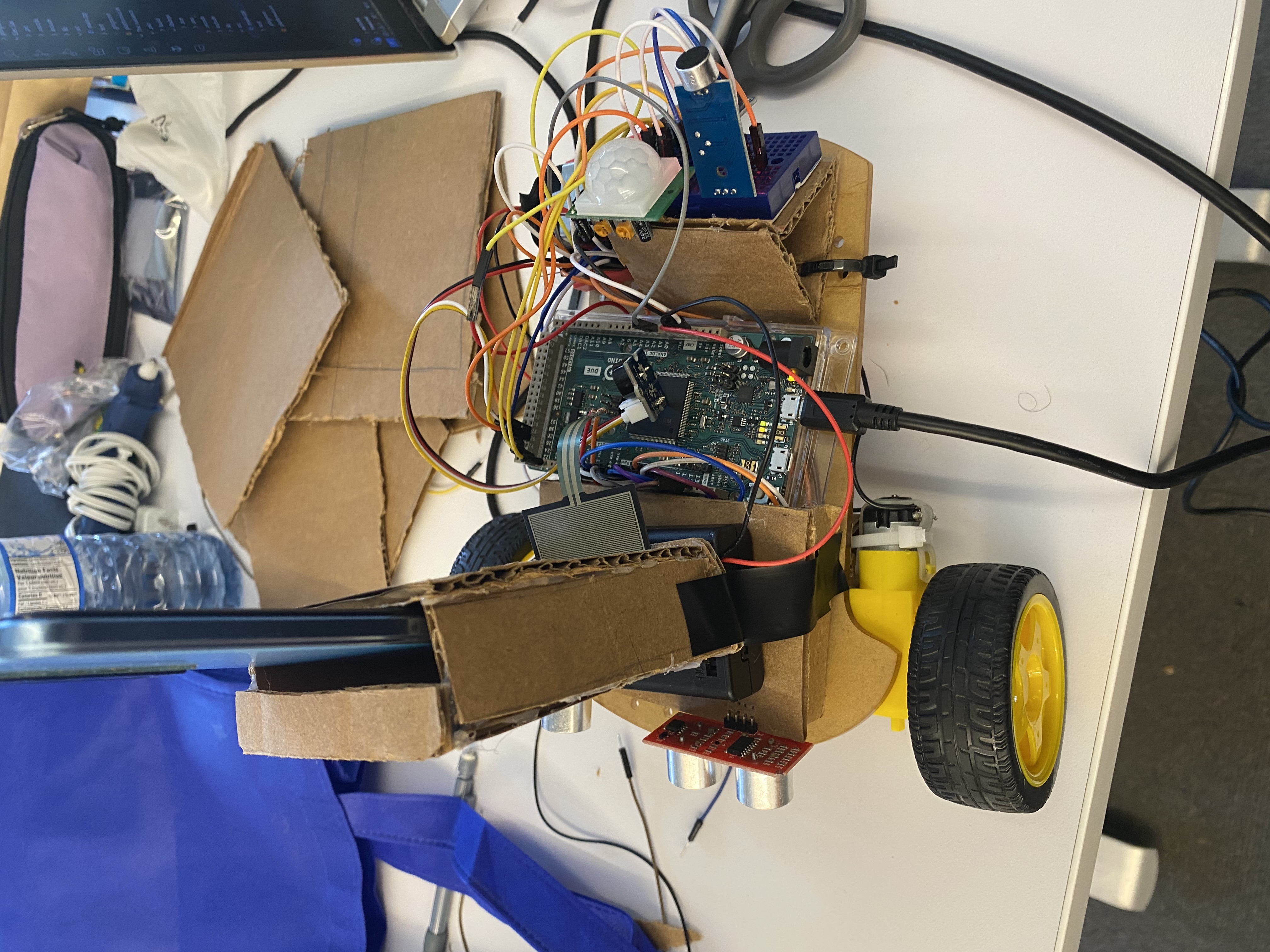
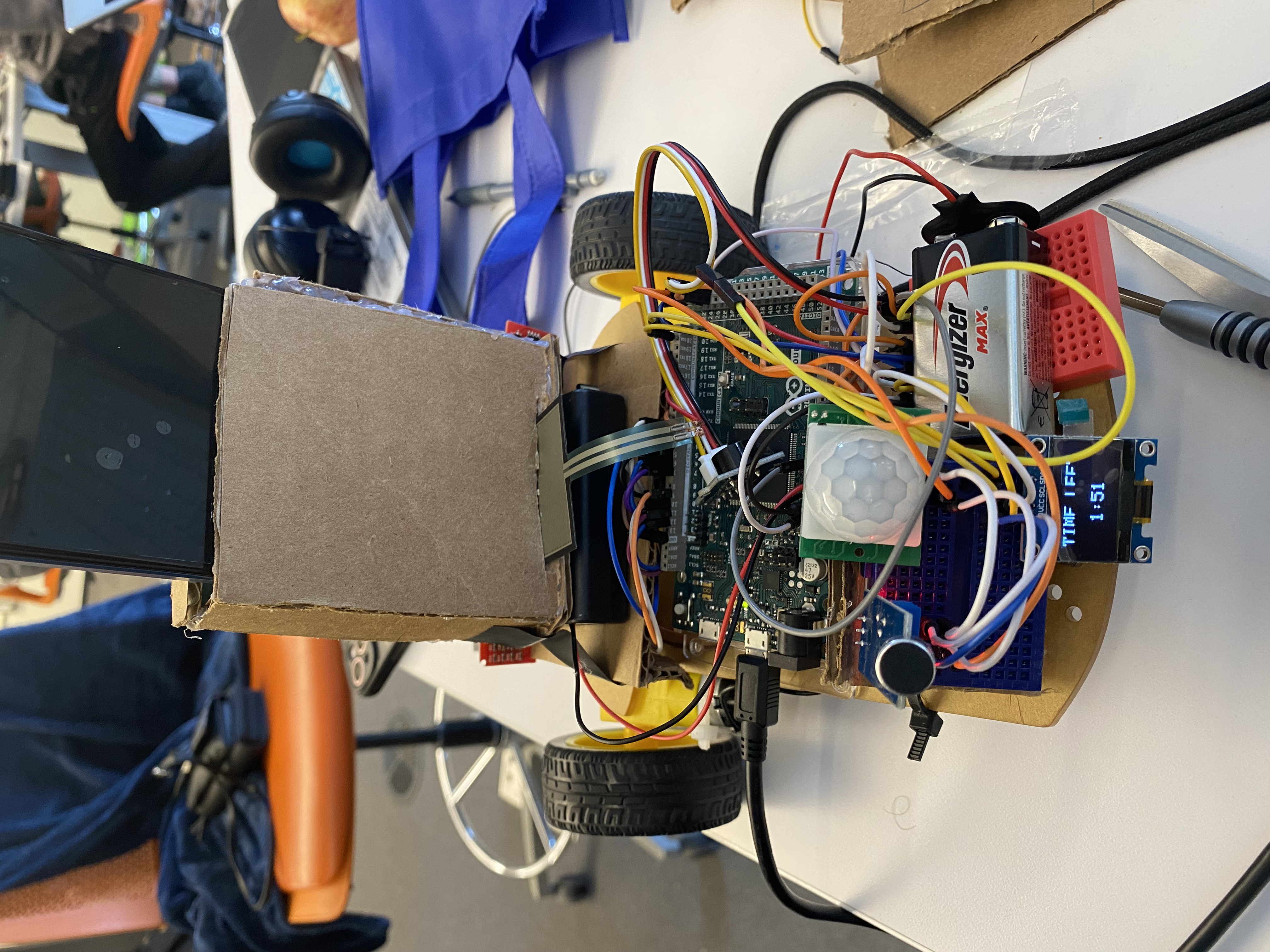
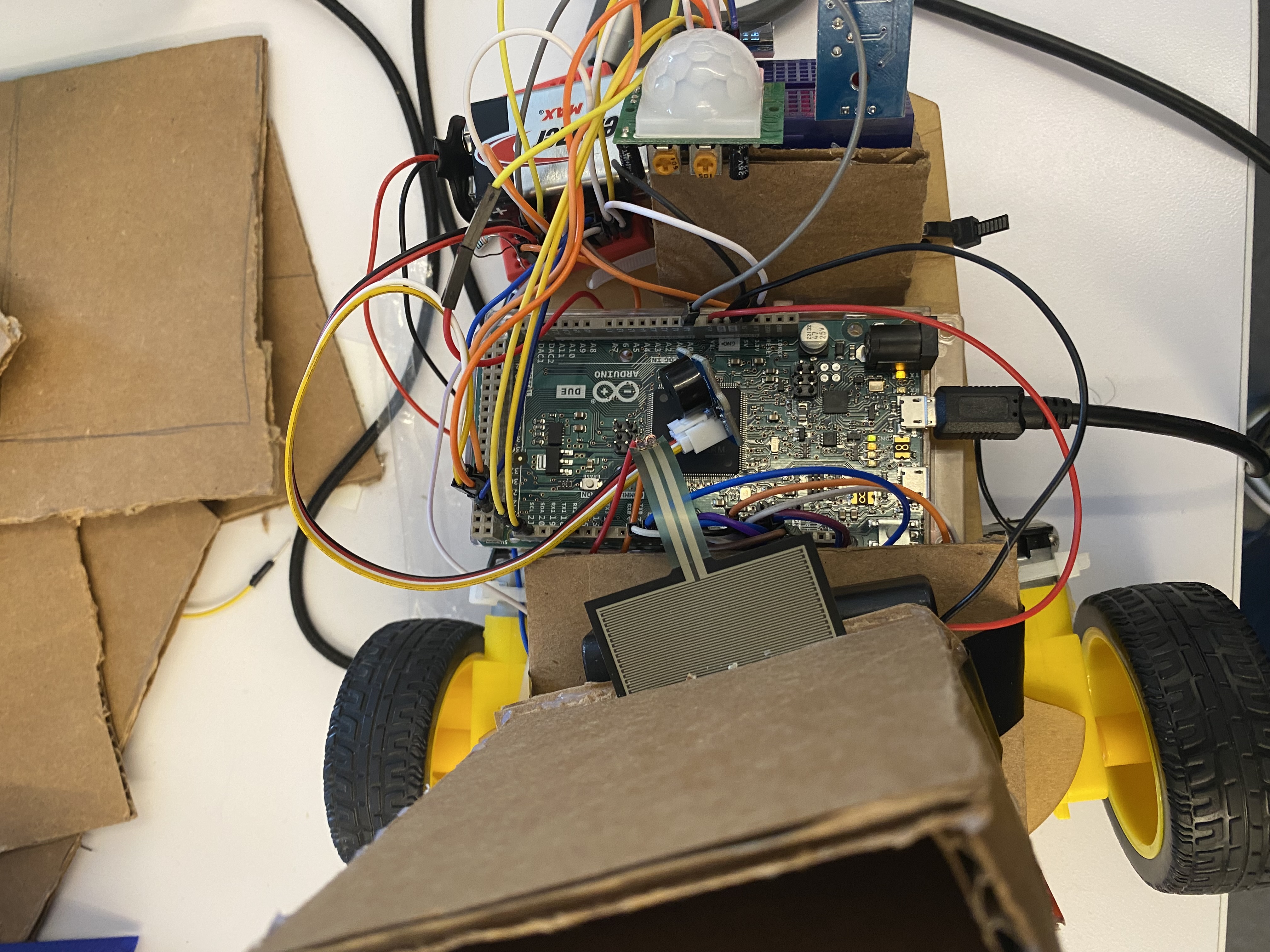
- Arduino Due
- 2 wheels
- Caster Wheel
- H-bridge/ Motor Driver
- Motors
- 2 UltraSonic Sensors
- Noise Sound Audio Sensor
- PIR Motion sensor
- 1 Grove Buzzer v1.2
- large breadboard
- 2 small breadboard
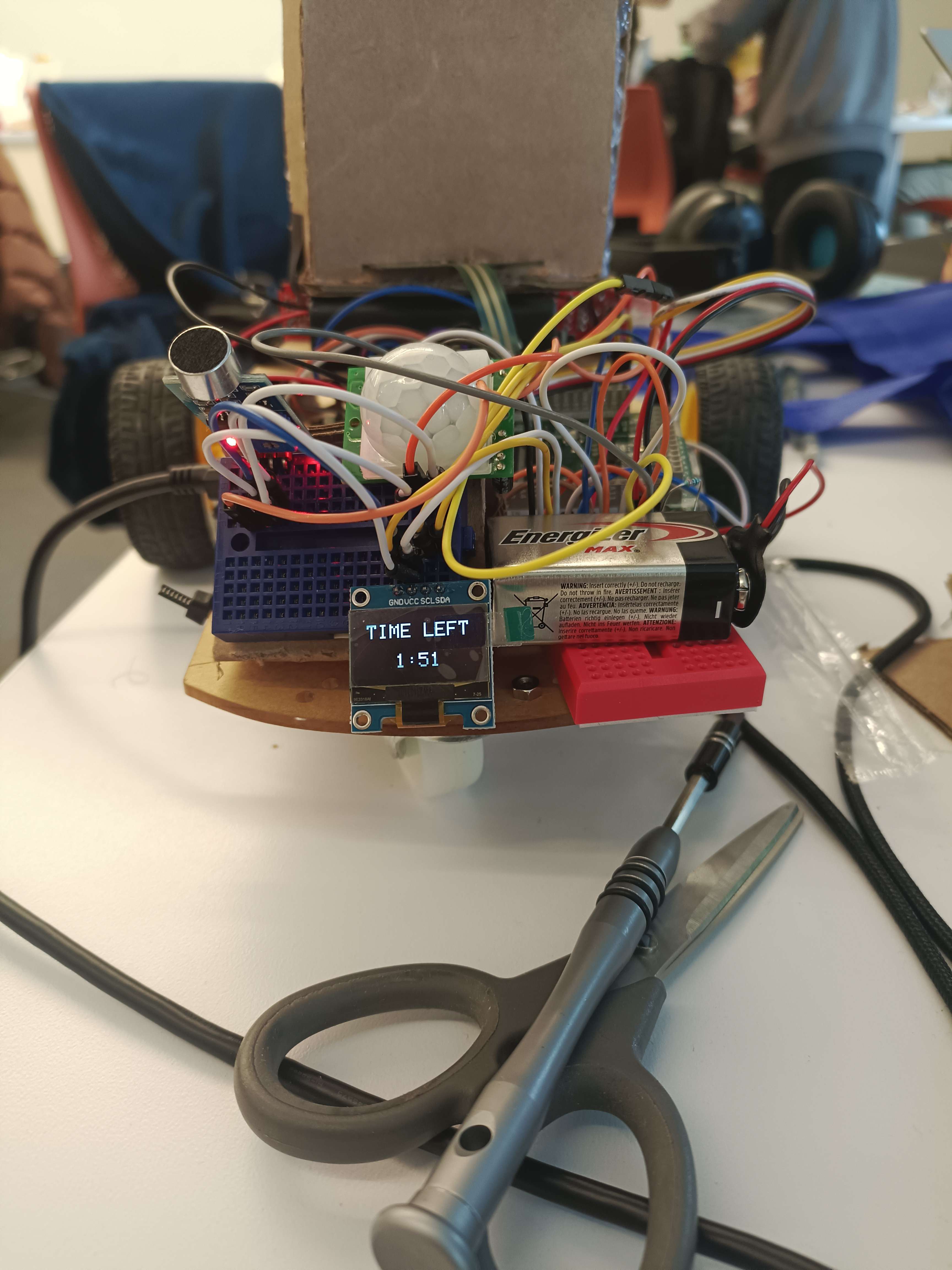
- OCD display
- Force sensor
- 9V battery
- 3*1.5 = 4.5 V battery
- A bit of wires and a lot of cardboard
and some software
Challenges we ran into
- different motor powers / motors not working anymore
We had an issue during the debugging phase of our code regarding the Ultrasonic Sensors. No matter what was done, they just seemed to constantly be timing out. After looking extensively into the issue, we figured out that the issue was neither hardware nor software related. The breadboard had sporadic faulty pins that we had to be considerate of. Thus causing us to test the rest of the breadboard for integrity.
Furthermore, we had a lot of coding issues regarding the swap between our Arduino uno and due. The Arduino due did not support the same built in libraries, such as tone (for the buzzer).
We also had issues with the collision detection algorithm at first. However, with a lil tenacity, and the power of friendship, you too can solve this problem. We originally had the wrong values being processed, causing out algorithm to disregard the numbers we required to gauge distance accurately.
Accomplishments that we're proud of
- completed project..?
What we learned
- yell at a nuisance if you want ur stuff back?
Never doubt the
What's next for Nuisance
Probably more crying

Log in or sign up for Devpost to join the conversation.