-
-
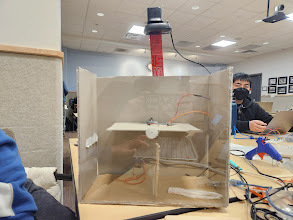
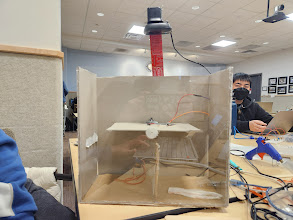
The final product.
Inspiration
People have always been trying to find new ways to help the environment, but those very basic ones-- such as recycling, are not done well enough. Even I sometimes get lazy about sorting out the trash, so we decided to build a trashcan that can help sort out recycle and trash all by itself.
What it does
It uses a single webcam with computer vision to classify different materials and send a signal to arduino and activate the servo motor to do sorting mechanism.
How I built it
We used python to run an image detection algorithm that determines if the object is plastic. If plastic, we send a signal to the arduino to turn on the servo that drops the trash. Trash is sorted into side based on recyclability.
Challenges I ran into
Some of the motion sensors may not work as we expected, such as the ultrasonic sensor. The AI model which is imported from an opensource is not always accurate, which we ended up need to try to find some other ways to ensure the algorithm is more reliable, based on the limited resources.
Accomplishments that I'm proud of
We accomplished a mechanism that allowed trash to be separated with good accuracy.
What I learned
Using photoresistor as a sensor to detect material. Using opencv for image detection.
What's next for Not Trashed
Implement sensors that can detect trash with higher accuracy so we can depend less on machine learning model.

Log in or sign up for Devpost to join the conversation.