-
-
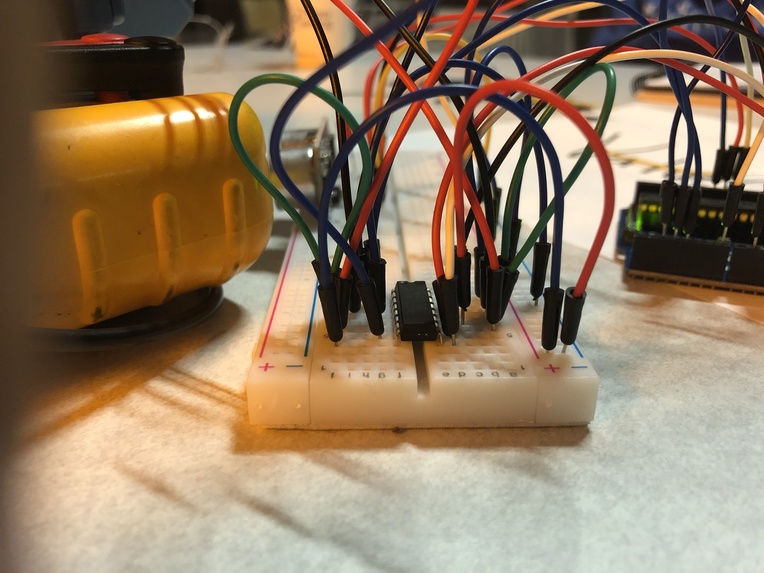
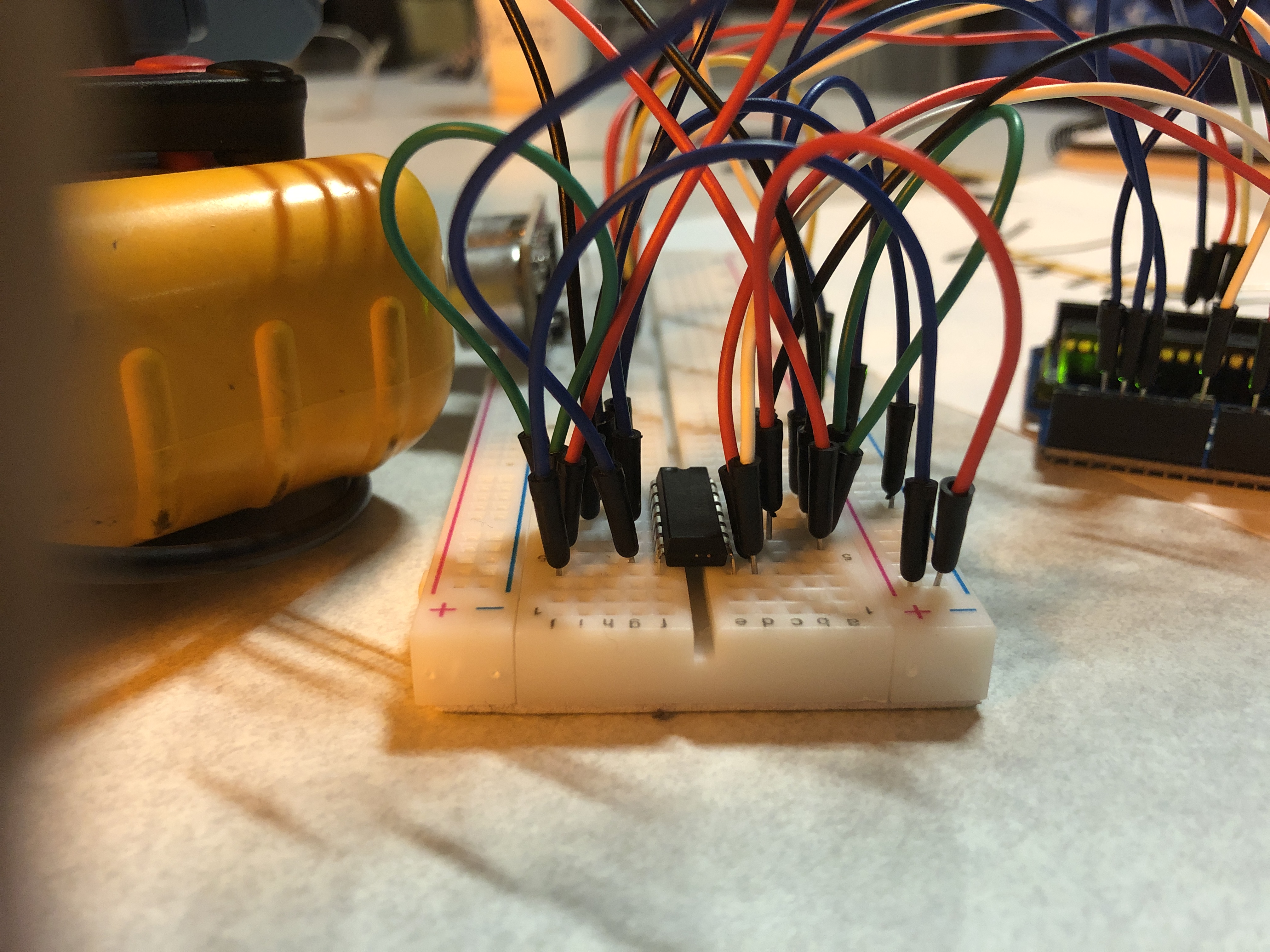
side view of the breadboard connections
-
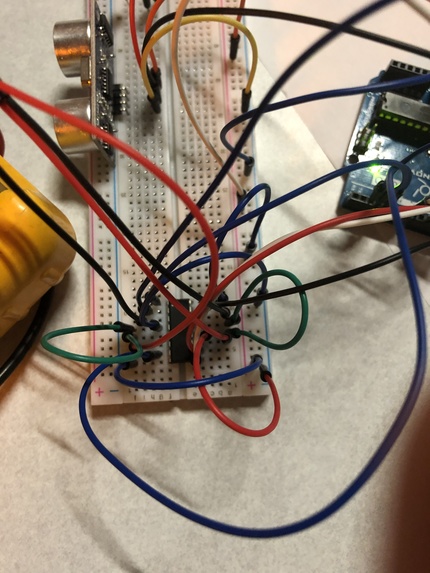
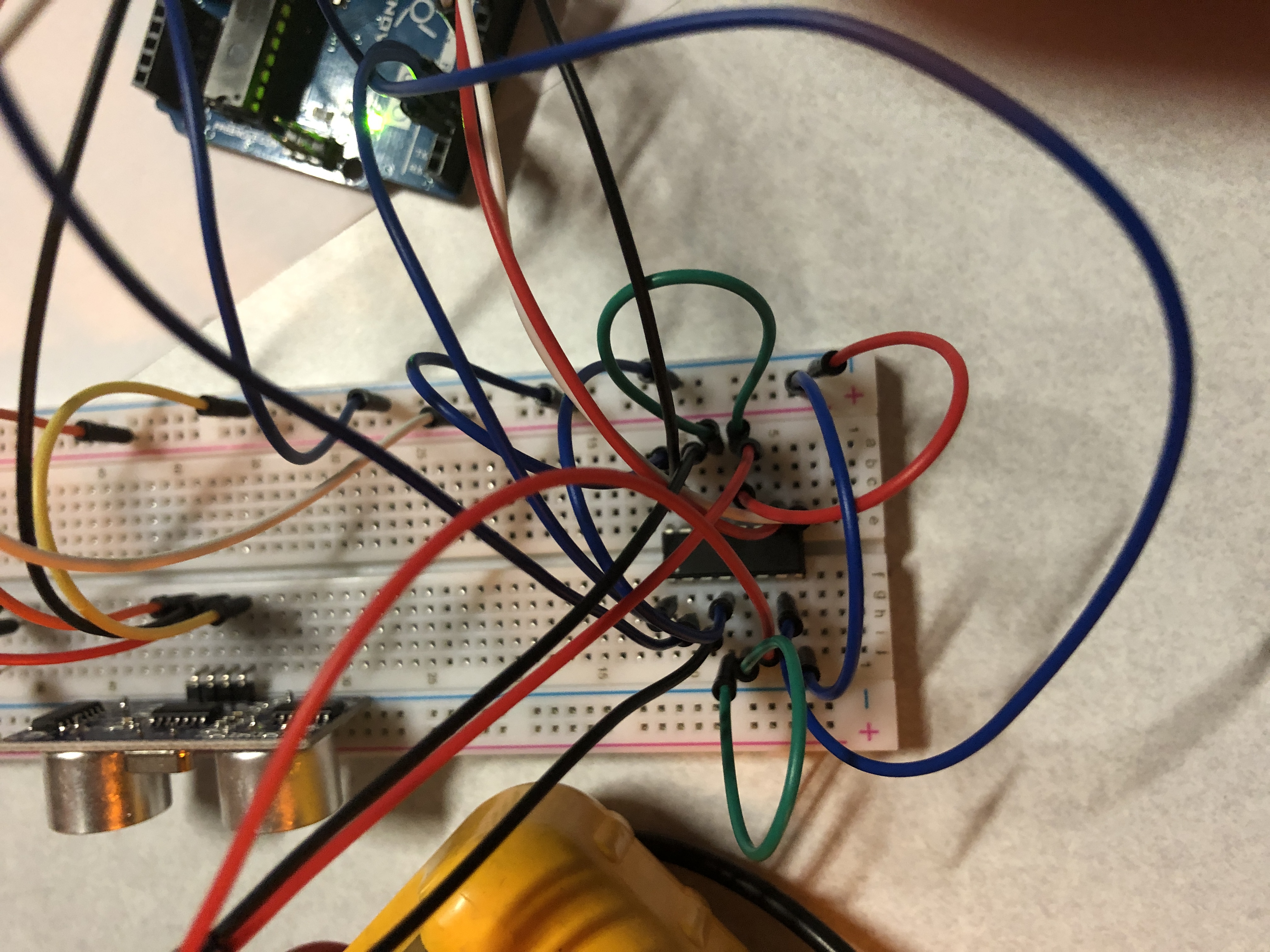
overhead view of the breadbaord connections
-
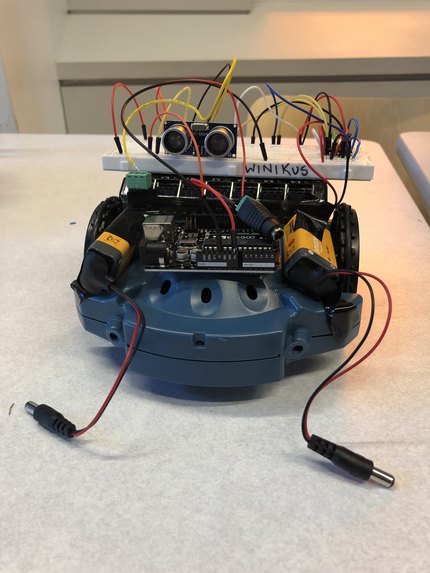
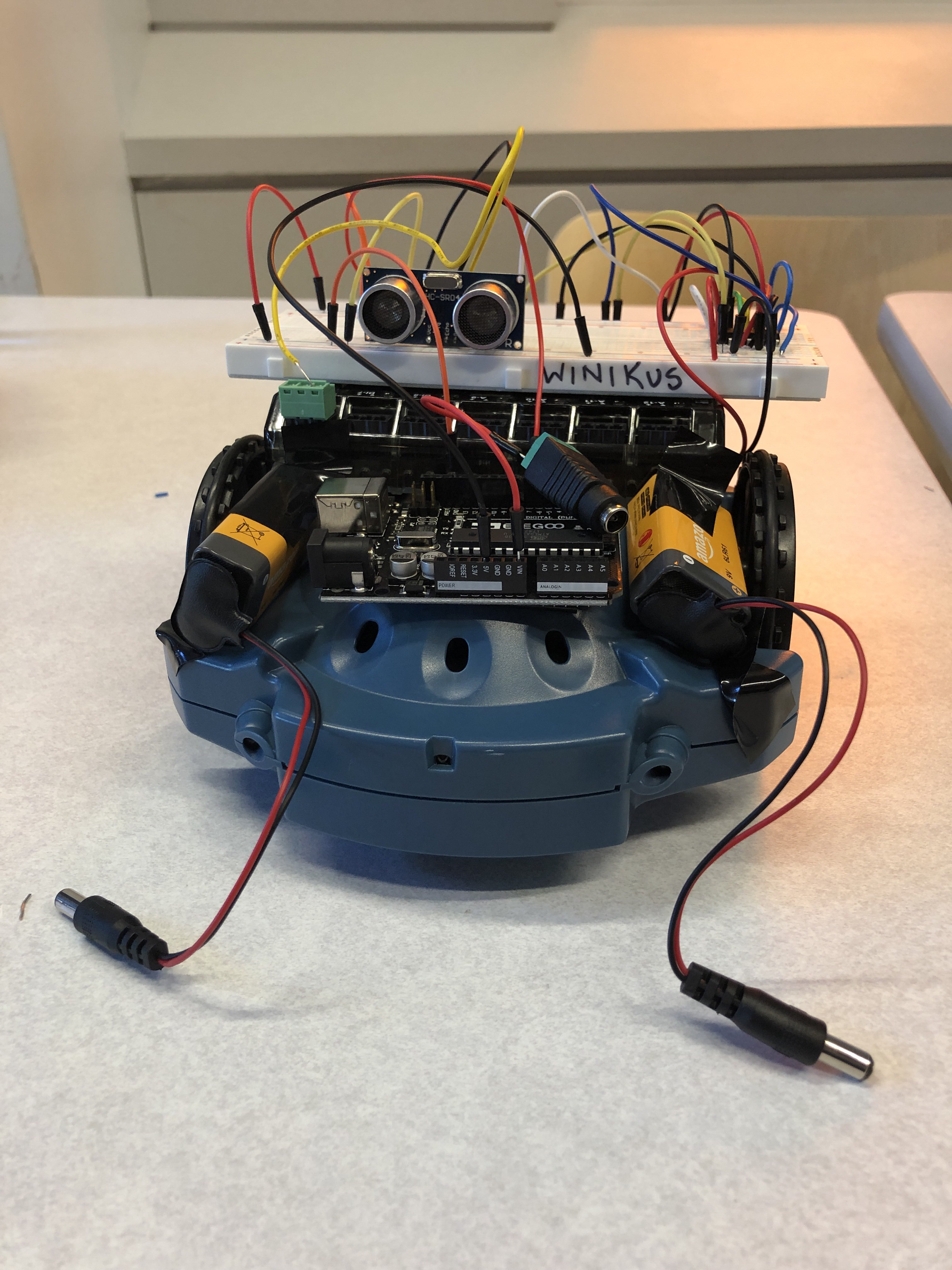
front view of most recent robot
-
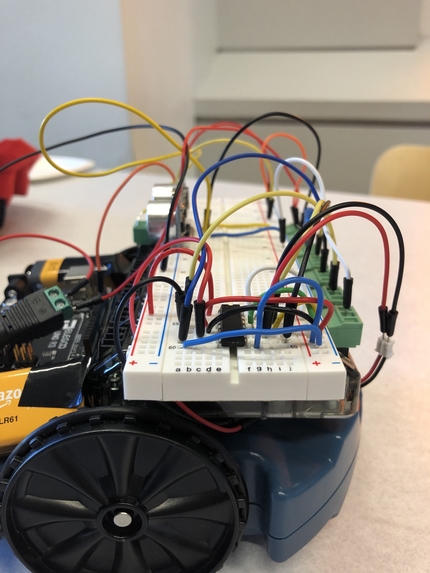
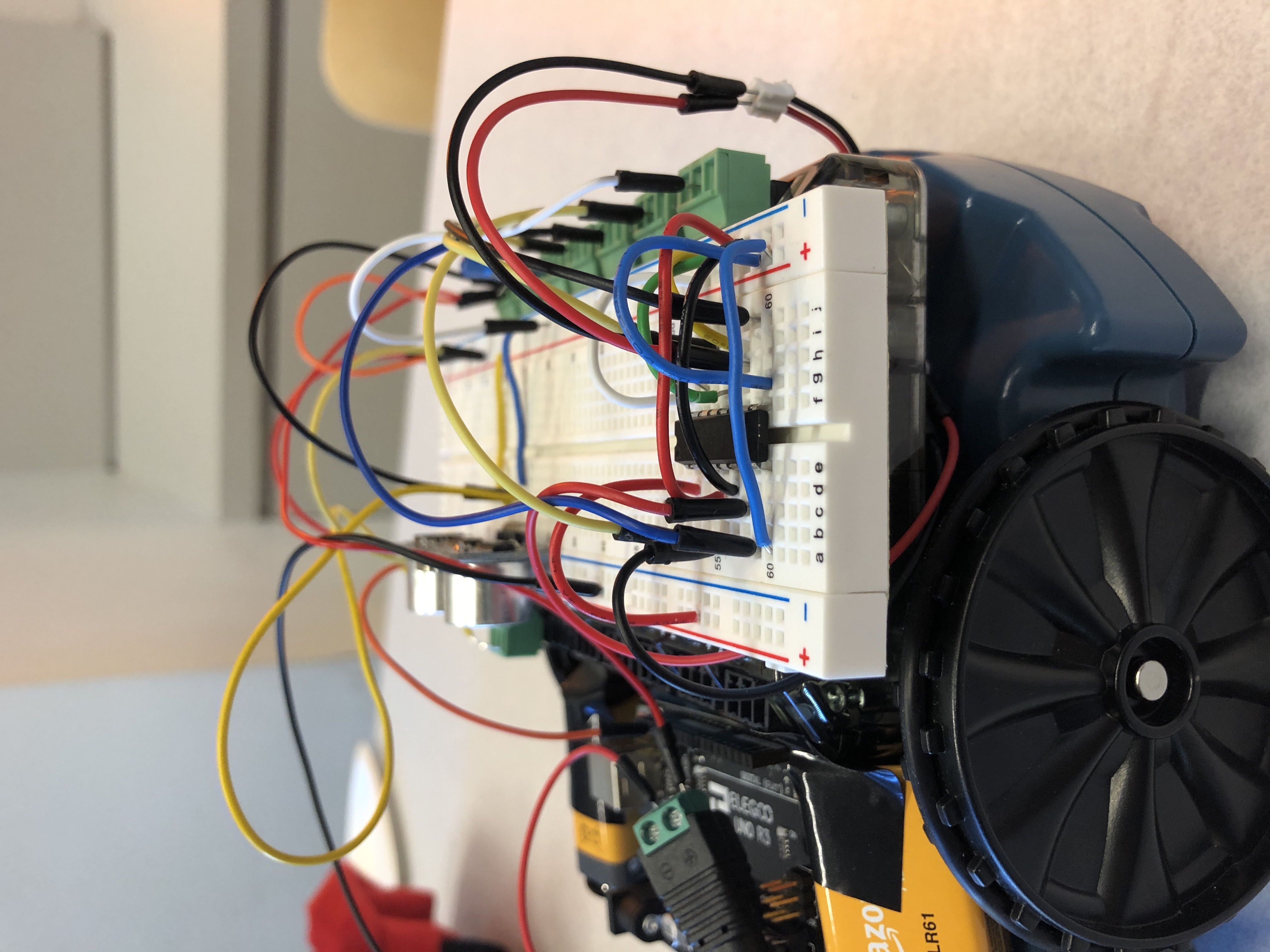
side view of the breadboard and the circuit connections
Inspiration
When I came here I wanted to do something with Arduino. I was thinking of something controlled by a remote. We got to talking about how the robot should react to obstacles in its way and I had this idea for it to make a funny sound when it was about to run into someone. We broke it down into two things we had to implement: a robot that could move via controls and a sensor that would react using the controls as input. though implementing we simplified it down to the response being an LED instead of a speaker, and the robot is controlled by the sensor rather than a remote control.
What it does
The robot will begin moving forward on a flat plane. when the sensor reports that an object is within range, the robot will respond by changing its movement. We do this by attaching an ultrasonic sensor that uses sound to sense what's around it. The robot begins by moving forward, but if an object is in range with the sensor (20 cm), it is programmed to stop, go backward, turn 90 degrees and go forward again.
How we built it
We began with the sensor for the robot: I thought we should to an ultrasonic sensor, which uses sound to detect its surroundings. we learned how to hook up a sensor to an Arduino and use the built-in IDE to store input and output ports as variables we could manipulate with code. Next, we borrowed a chassis from another robot, ripped out the motor cords from its circuit board, and struggled to attach it to our breadboard and Arduino. after we had everything connected to a variable/port, we wrote out the code in the IDE and debugged using physical testing.
Challenges we ran into
For one, neither of us had much experience with Arduino or hardware programming in general. Much of our project involved skills or elements we had only vaguely heard about if not completely unaware of. This lack of experience made our planning go backward. For example, we wanted to connect the motors to the Arduino, we needed something called an h-bridge, which needed to be configured according to something called a data table, and programmed using certain functions in the Arduino IDE .. etc. Basically, we had to start with what we wanted to happen, and worked out way back to what was possible with the tools we were provided at the time.
Accomplishments that we're proud of
We actually accomplished a lot. we started this project with one Arduino kit and no particular ideas in mind. The fact that we made out the one-off idea that began as a joke into a complex multistep project that centers around something we knew absolutely nothing about is really impressive.
What we learned
You don't need to be an expert at hardware to complete a hardware project! There are many useful tools and skills you learn when you admit you don't know something and want to learn more.
What's next for Serial Evader
Speakers as the sensor response! and more complicated motion reactions from the robot.




Log in or sign up for Devpost to join the conversation.