-
-
Rover after 24 hours
-
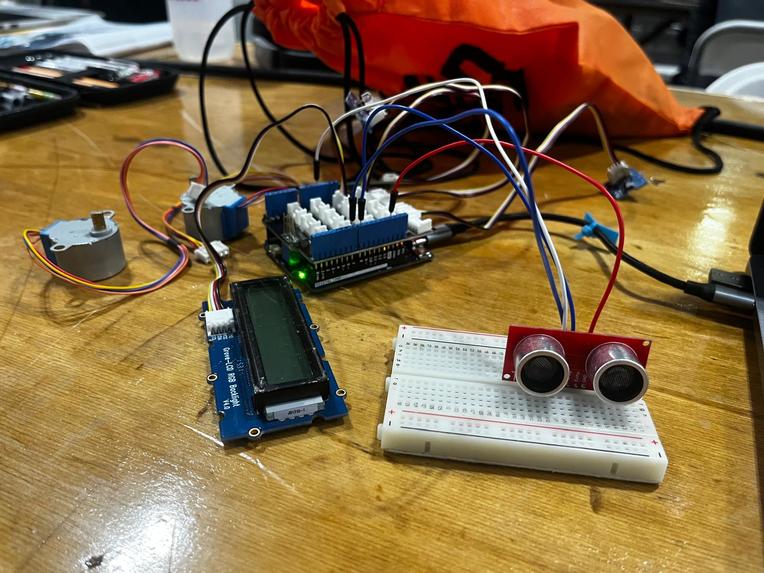
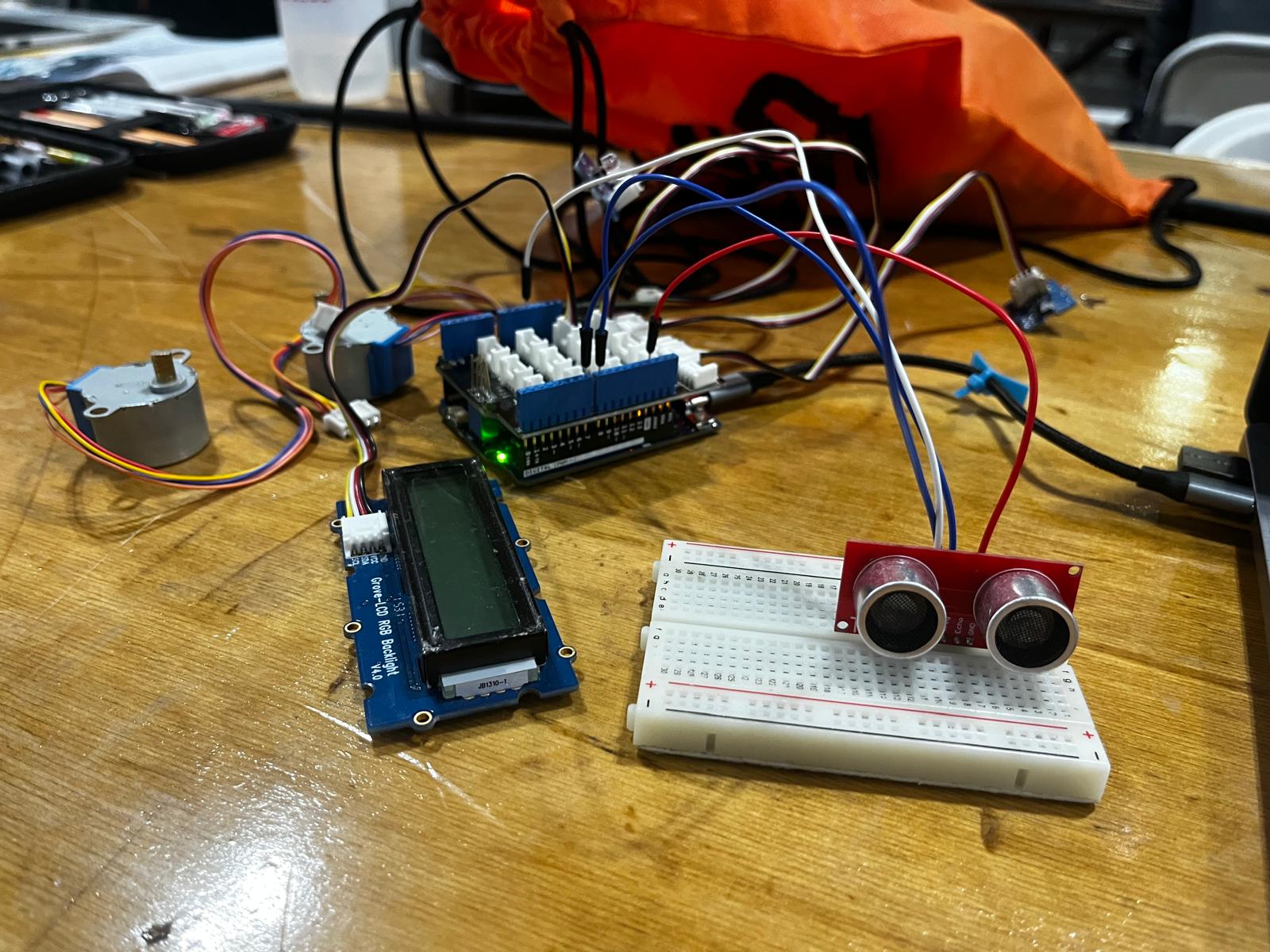
These are the basic electronics used in the rover
-

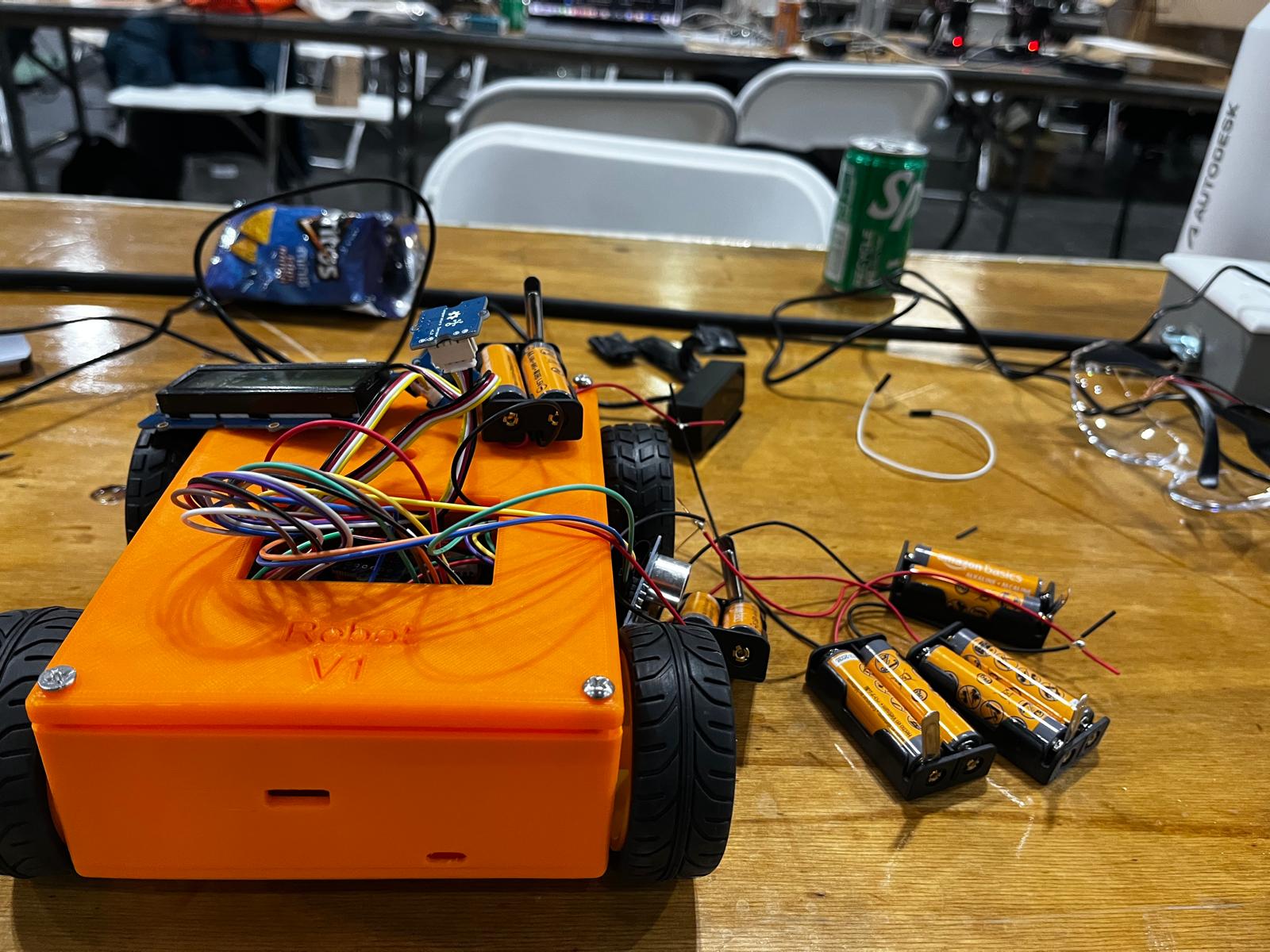
Rover after 20 hours
-

Final prototype(Upclose)
-

Final rover prototype and control cener interface



Inspiration
Our project was inspired by the many rovers that have gone to Mars to collect data and by the discoveries that have furthered humanity's advancements in space exploration. Specifically, we focused on building a rover that can be mass-produced, is low-cost, and can be easily adapted to meet each mission’s specific needs. Currently, we send rovers that have millions of dollars worth of technology on them without knowing if they will function properly or fail due to unknown factors. So we came up with the idea that we would make expendable robot scouts that can be mass-sent due to their minimal payload consisting of only minimal tech, and even if they were unable to make it back to the main rover, we would have less effect on the overall mission expense due to them being highly replaceable. A mothership carrying 10 to 20 of the lightweight, cheap rovers would land on Mars to a predetermined position, and then the cobots would be deployed to inspect the area as needed. That was our inspiration.
What it does
Our result is pretty similar to how we imagined it to be. Right now, we have created one unit of our robot fleet. It detects hazardous obstacles, graphs out temperature, pressure, light, and the distance from the nearby object. It moves in the manual override for now and gets stopped as soon as it detects an object. We can also see the environment from the bot's POV, where it detects objects.
How we built it
We 3D sent a print for a basic rectangular chassis and lid for a rover. While it was being printed, we tried to make the circuit as best as we could. We attached wheels for mobility, an ultrasonic sensor to detect obstacles, light, pressure, and temperature sensors to get an evaluation of the environmental conditions, and processing for the mission. Then, we added an LCD on the rover that shows a color associated with different behaviors of the robot. For example, if it shows green, it means functioning well, and if it is red, it means there is a problem or an object detected. After that, we got our chassis and wheels, so we arranged everything and attached a webcam. Finally, we soldered and made a battery pack to drive the motors and closed the lid
Challenges we ran into
As is expected, we faced as many challenges as someone could while on their way to make something innovative in 36 hours with limited resources. We were short of hardware, even the one we reserved, due to which we had to make a lot of changes to our design and implementation. Then we had the challenge of being novices. Our team is made up of two students, and for both of us, this was our first hackathon. We tried to debug, reconfigure, and find out why some things were not functioning the way we expected them to. And last but not least, we were a bit short of people. There were many times when none of us knew how to do the thing we wanted, and it was crucial for the project. We had to either learn it entirely from scratch or ask for help around.
Accomplishments that we're proud of
We are proud that we stuck around and didn't give up until the very last moment. We made our robot work better than our expectations. We tried to put in a lot of effort, and we were successful, and most importantly, we were happy with the results. We had a lot of fun building, which we think is our be¥iggest accomplishment. Being a part of this hackathon made us remember why we love engineering. We made friends, met new people, and saw so many ideas; just being in an environment like that is an accomplishment in itself.
What we learned
We learned how to troubleshoot, adapt, and work under pressure, a lot of pressure. When things break down, don't work, or don't go as planned, that scenario tests our real abilities and problem-solving skills, and we learned exactly that. We were also able to implement a lot of classroom-learned ideas into our idea, which was a bonus.
What's next for NEXUS
Next, we would like to fine-tune it for unknown terrains and try to make it work under collaborative environments with more of the same units. We would also like to make it more compact and wire-free in order to better simulate the real-world scenario.

Log in or sign up for Devpost to join the conversation.