-
-

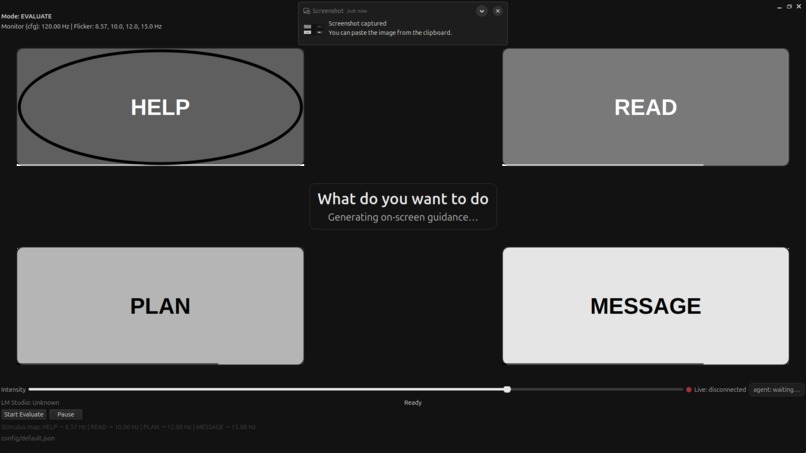
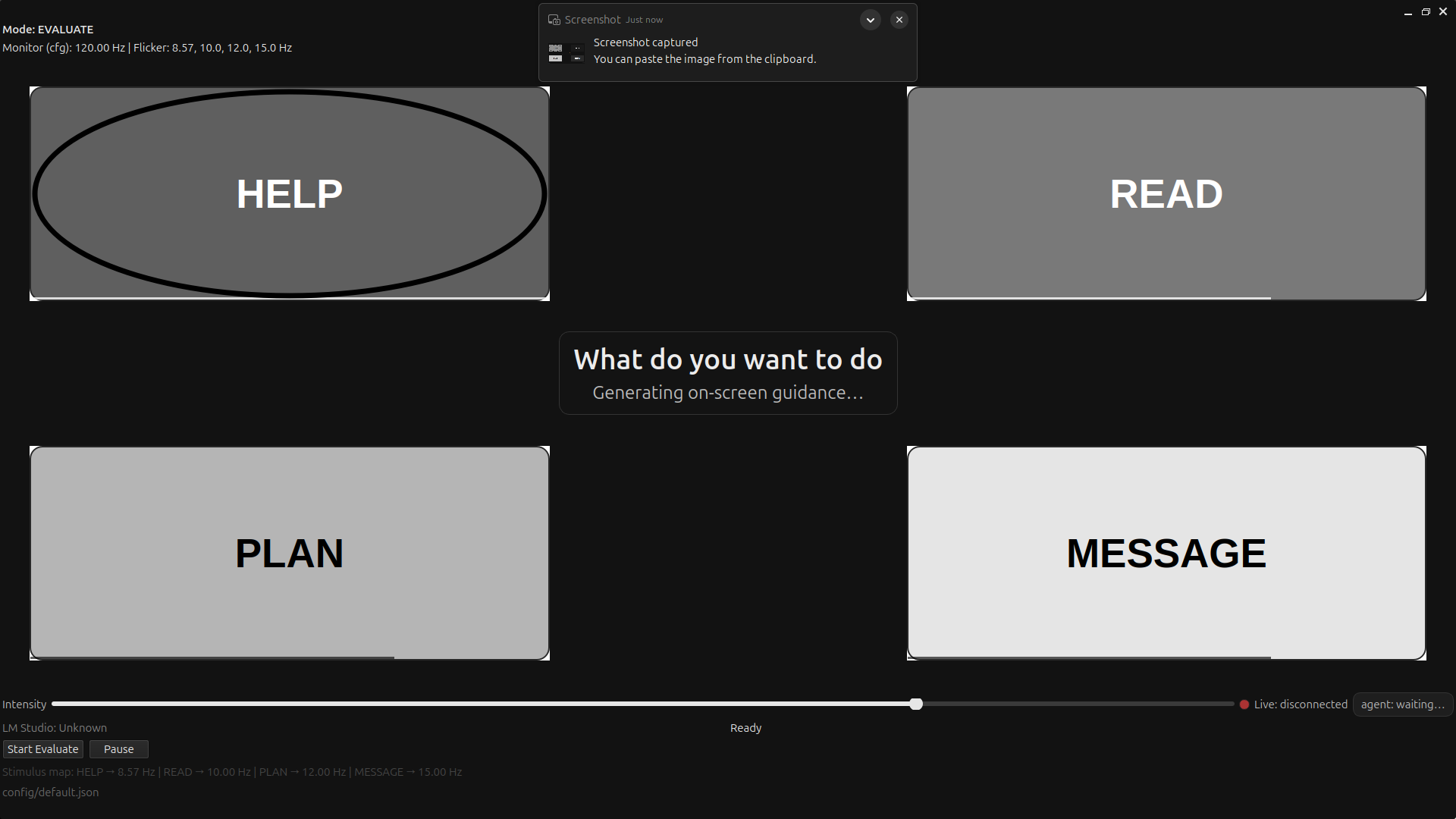
Focusing on the 2×2 UI: SSVEP detects the option and the local agent acts. All offline.
-

NeuroRelay in action: EEG headset + gaze = intention. Local offline agent converts focus into tasks.
-
UI


Inspiration
Computers speak fast; we don’t. Human→machine communication bandwidth is tiny—and for people who can’t use hands or voice, it can be near zero. NeuroRelay explores a different path: use the eyes to choose, then let a local reasoning agent do the heavy lifting—all offline for privacy and reliability.
What is SSVEP ?
Steady-State Visual Evoked Potentials appear when you look at a flickering stimulus (e.g., 10 Hz). The visual cortex echoes that rhythm (and harmonics). If each on-screen tile flickers at a different frequency, an EEG decoder can infer which one you’re looking at.
What it does
A clean 2×2 UI shows four large choices: HELP / READ / PLAN / MESSAGE.
The user fixes their gaze; we run an SSVEP decoder to pick the winning tile, show neurofeedback (confidence + dwell ring), then trigger a local gpt-oss agent to act inside a sandbox:
- READ → short summary tailored for offline TTS.
- PLAN → 5–8-step action plan or extracted TODOs.
- DEADLINES → due-date extraction + optional .ics file.
- MESSAGE / HELP → concise caregiver message or a high-contrast on-screen overlay.
Everything is audited to JSONL (BrainBus) and files are written to workspace/out/.
Runs entirely offline; if LM Studio is present the agent uses a local gpt-oss-20b/120b; otherwise it falls back to deterministic heuristics.
How we built it
Stimuli & UI (PySide6/Qt): 2×2 grid, frame-locked flicker with sinusoidal contrast.
- Frequencies (60 Hz displays): 8.57, 10, 12, 15 Hz (auto-selects 50 Hz set if needed).
- Comfort controls: intensity slider, pause, fullscreen; accessibility-first typography.
- Neurofeedback: confidence bar + circular dwell indicator (default 1.2 s).
- Frequencies (60 Hz displays): 8.57, 10, 12, 15 Hz (auto-selects 50 Hz set if needed).
Signal pipeline (SSVEP):
- Window: ~3.0 s rolling; prediction rate: 4 Hz.
- Preprocessing: band-pass 5–40 Hz, optional notch 50/60 Hz; target channels O1, Oz, O2.
- Decoder: CCA against sine/cosine references at 1*f* and 2*f*; softmax over z-scored scores → confidence; stability + dwell to commit.
- Window: ~3.0 s rolling; prediction rate: 4 Hz.
Live / Replay / Sim:
- Live: LSL (pylsl) inlet with thread-safe ring buffer.
- Replay: EDF/CSV reader for deterministic demos.
- Simulation: keyboard control or synthetic LSL streamer (sine + noise) that mirrors the live path.
- Live: LSL (pylsl) inlet with thread-safe ring buffer.
Local agent (offline):
- BrainBus JSON from UI → agent subprocess.
- Tools: summarize, todos/plan, deadlines(+ICS), compose message/overlay.
- Sandboxed I/O: reads
workspace/in/, writesworkspace/out/. - LM Studio (
localhost:/v1) with gpt-oss if available; otherwise heuristic fallbacks. - Non-destructive by design (drafts only, never sends email).
- BrainBus JSON from UI → agent subprocess.
Observability & UX polish: badges for Offline / Local LLM / Live status, last output shortcut, log tail viewer, “take a visual break” hint after multiple commits.
Challenges we ran into
- Hardware timing: without guaranteed access to the EEG cap before the deadline, we needed a demo path that is credible and reproducible → synthetic LSL stream that uses the same decoder and timing as live.
- Visual comfort vs. SNR: balancing flicker intensity and duty to reduce fatigue while preserving SSVEP power.
- Numerical robustness: filter padding, notch design vs. Nyquist, and regularized CCA to avoid ill-conditioned covariances.
- End-to-end latency: keeping the post-window processing under ~100 ms so total stimulus→action remains ~3.5–4.0 s.
Accomplishments that we're proud of
- A fully offline, auditable brain-to-agent loop that turns gaze into real work on local documents.
- Reproducible demo modes (live, replay, sim) using the same decoder pipeline.
- Accessibility-first UI: high-contrast HELP/MESSAGE overlays, offline TTS, and large targets.
- Clean JSONL telemetry and a safe sandbox so judges can verify exactly what happens.
What we learned
- Discrete BCI + local reasoning is a powerful combo: four reliable choices are enough to unlock meaningful workflows.
- Designing for auditability and safety (JSON logs, drafts-only, sandbox paths) makes offline AI more trustworthy.
- Small UX touches (dwell ring, stability checks, comfort controls) dramatically improve perceived control.
What's next for NeuroRelay: Brain-to-Agent
- Light personalization: FBCCA / TRCA and quick per-user channel weighting.
- Hybrid confirmation: SSVEP select + P300 confirm for double-safe commits.
- More options (6–8) with adaptive layouts and duty cycles.
- Assistive ecosystems: AR/VR stimuli, wheelchair/robot triggers, multilingual TTS.
- Clinical-style packaging: calibration flow, metrics overlay, and operator reports.

Log in or sign up for Devpost to join the conversation.