-
-
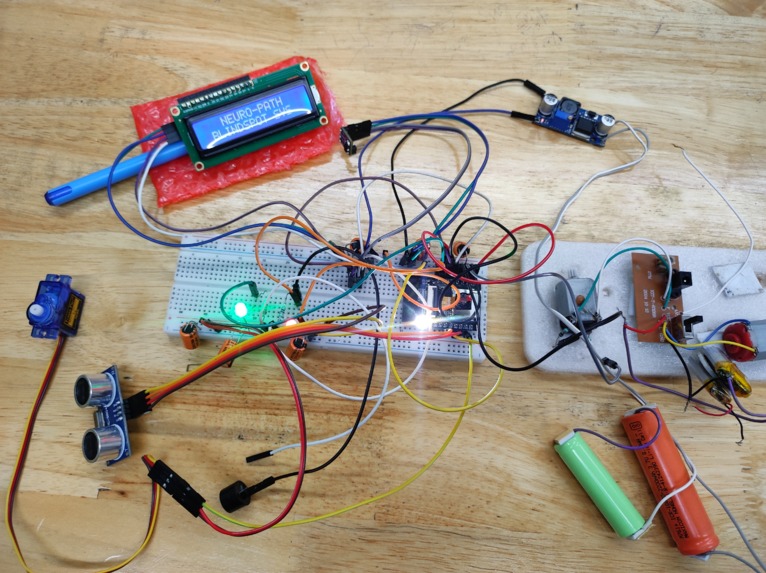
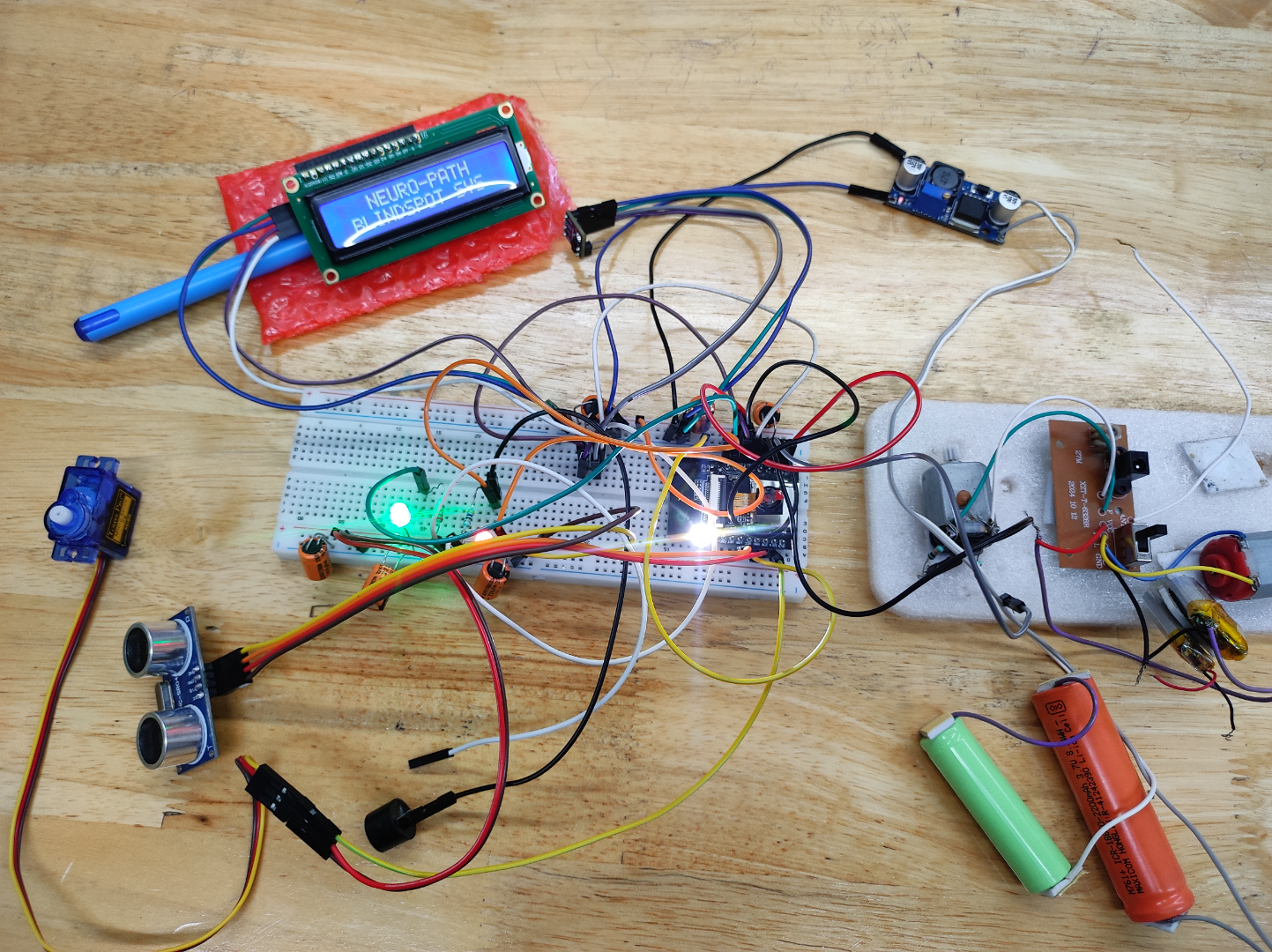
The dedicated 5V power layout keeping the AG~3 NEURO-PATH hardware ecosystem crisp, responsive, and completely crash-free.
-
The complete multi-sensor fusion architecture and parallel fail-safe warning circuitry layout.
-

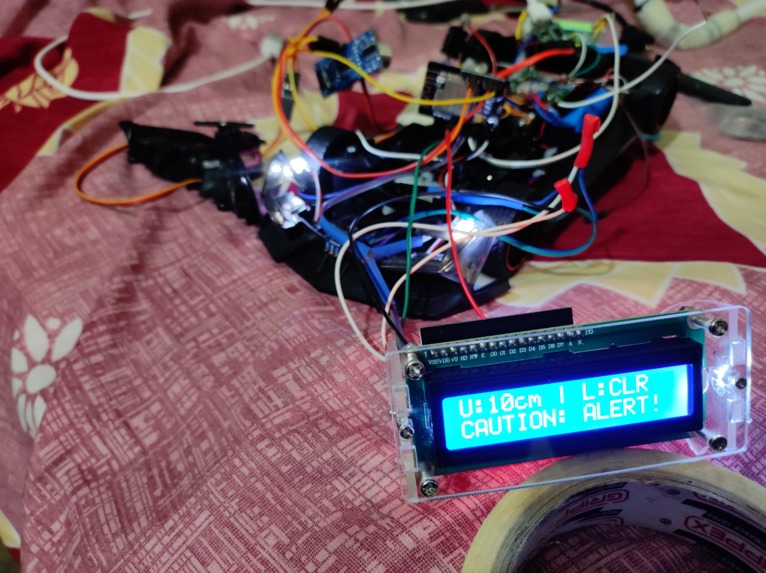
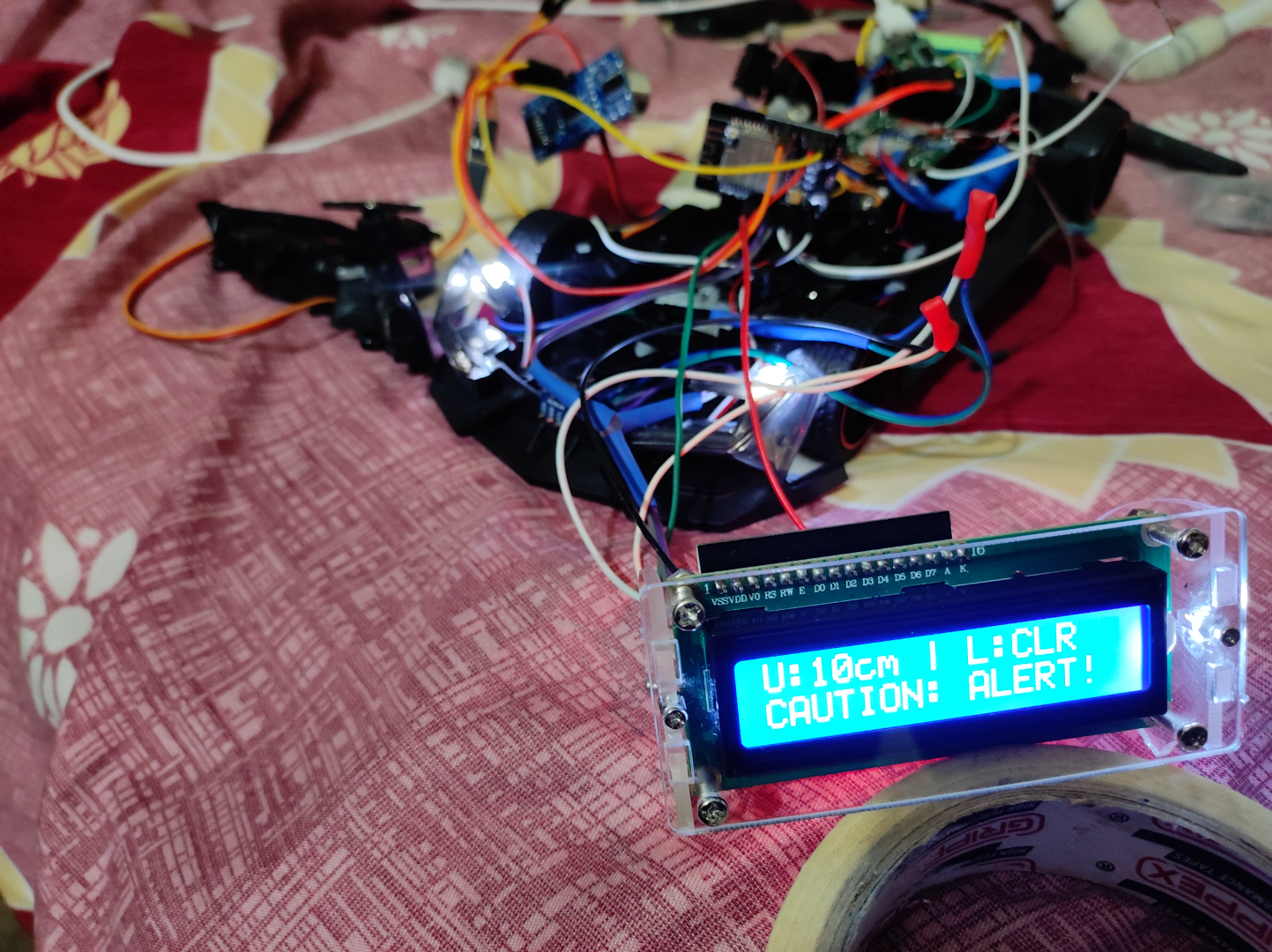
The physical heartbeat of AG~3 NEURO-PATH, fusing ultrasonic ranging with edge AI to eliminate blind-spot collision risks.
-
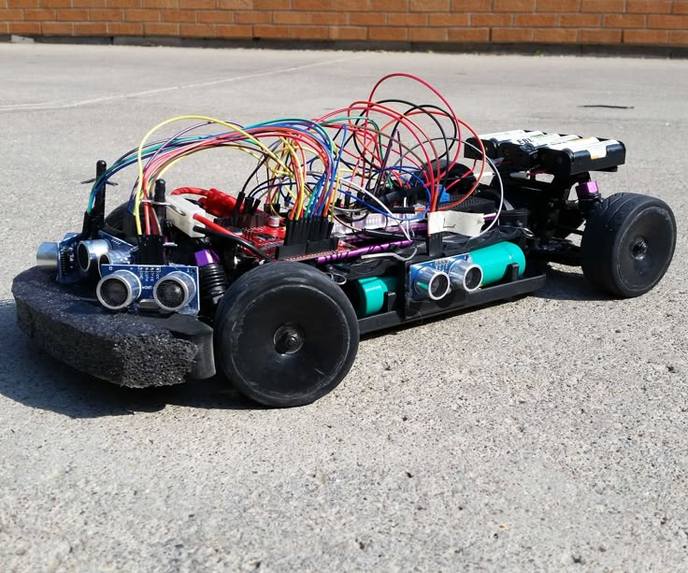
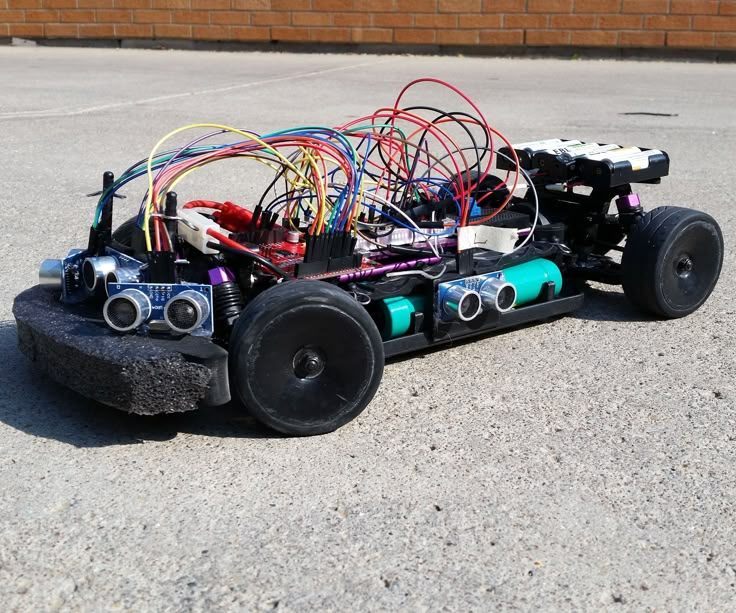
A ground-level view of our decoupled edge-computing framework, armed with dual ultrasonic arrays and ready to track physical threats.
-

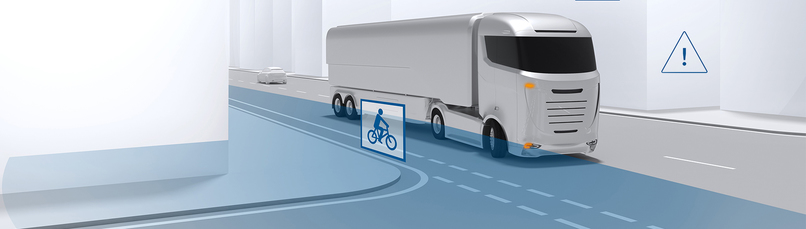
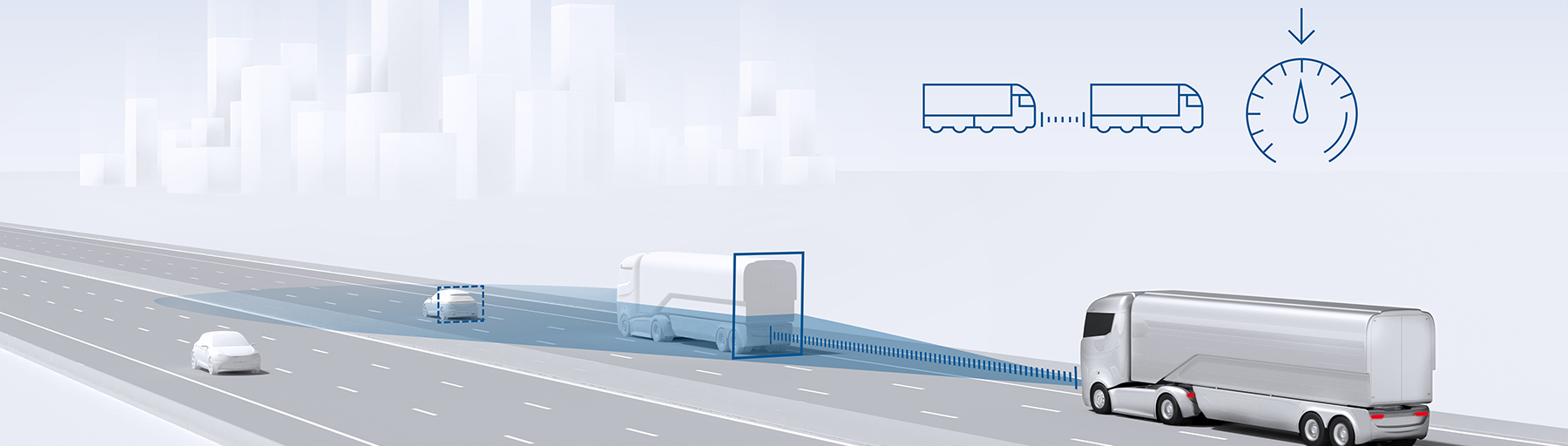
Visualizing the critical forward blind spot where our spatial detection matrix acts as a digital line of sight.
-

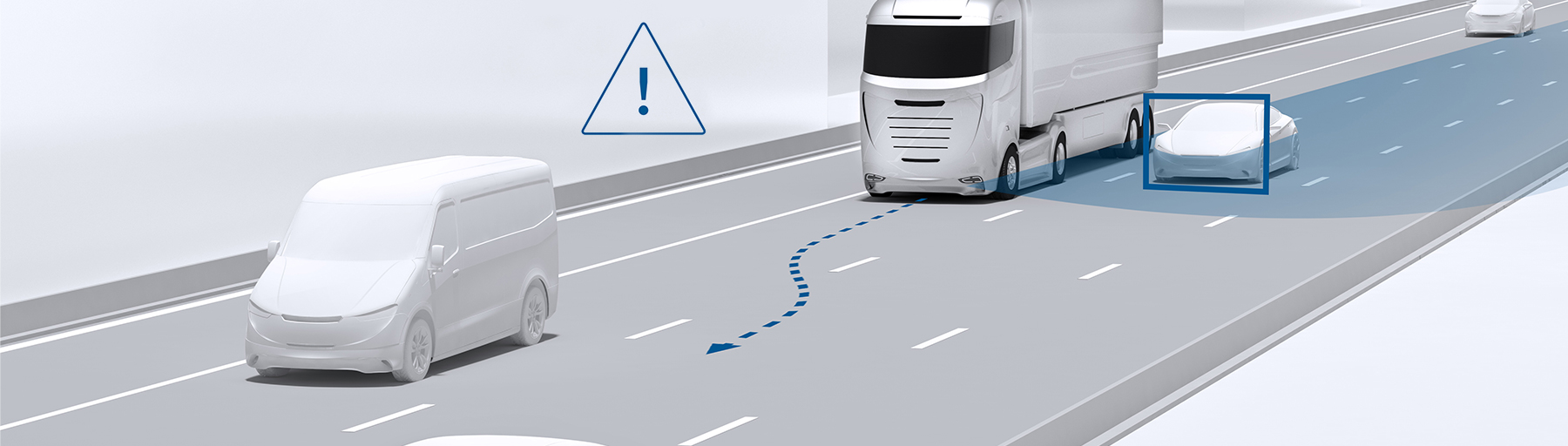
Conceptualizing the exact spatial zone where our edge-AI vision actively flags vehicles hiding in the driver's most dangerous blind spot.
-
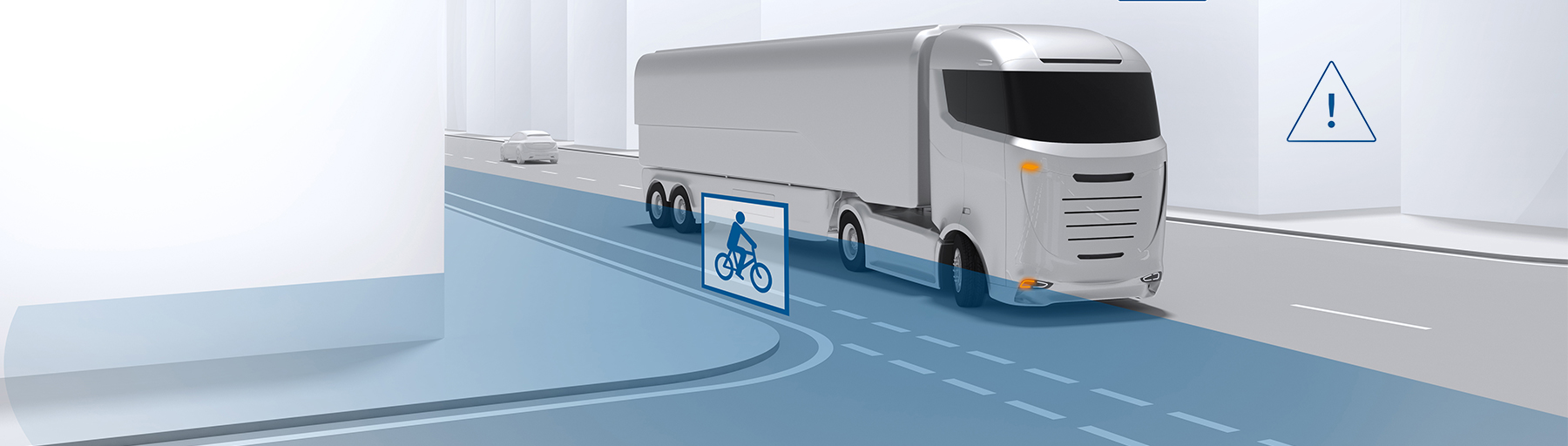
Zero Blind Turns: Real-time lateral tracking to protect vulnerable road users.
-
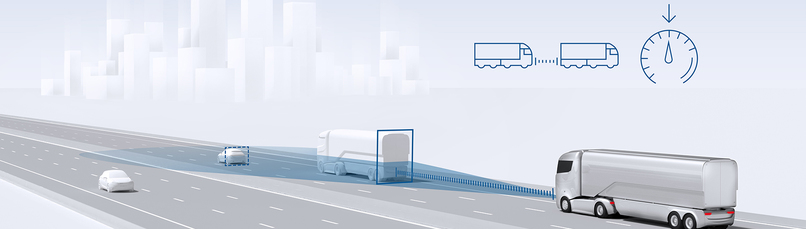
Dynamic Distance Control: Real-time forward tracking to prevent rear-end collisions.


The AG~3 NEURO-PATH Journey: Balancing Machine Vision with Human Cognition
💡 The Inspiration
Modern Advanced Driver Assistance Systems (ADAS) are engineering marvels, yet they suffer from a profound fundamental flaw: they design for the vehicle, not the human operator. During our research into smart mobility and driver safety, a critical paper in human factors engineering (Xu et al., 2024) completely shifted our perspective. The literature demonstrates that when a driver shifts attention from a secondary task back to manual driving during an emergency takeover, they incur a severe cognitive "switch cost." This mental bottleneck temporarily degrades driving performance and structural stability, an impairment that can linger anywhere from 20\text{ seconds} up to 5\text{ minutes}. Furthermore, traditional blind-spot sensors are aggressively linear—beeping constantly at every passing guardrail or distant vehicle, inducing sensory fatigue. Drivers often become so overwhelmed by these persistent, noisy false alarms that they disable the safety features entirely. We were inspired to build AG~3 NEURO-PATH: a human-centric, multi-sensor fusion blind-spot system engineered to actively minimize a driver’s cognitive workload, filtering out spatial noise and delivering intelligent, motion-gated support only when a genuine collision threat materializes.
🛠️ How We Built the System
Building the AG~3 NEURO-PATH required a decoupled edge-computing architecture to isolate low-latency physical sensing from heavy computer vision processing.
+------------------------------------------+
| AG~3 NEURO-PATH COCKPIT |
| [Green LED] [Red LED + Active Buzzer] |
+------------------------------------------+
^
| (Wired Parallel Control)
|
+------------------------------------------+
| SECONDARY VISION MODULE |
| ESP32-CAM (AI-Thinker / OV2640 Lens) |
+------------------------------------------+
|
| (Direct Hardware UART @ 115200 Baud)
v
+------------------------------------------+
| LOCAL PROCESSOR |
| Laptop Host (Python Core + YOLOv8) |
+------------------------------------------+
1. The Physical Cockpit & Sensory Core
The primary alert interface relies on hardware connected to an AI-Thinker microcontroller configuration.
- To ensure immediate responsiveness, the telemetry tracking loop runs independently of external web delays.
- We designed a physical cockpit alert layout using a safe parallel wiring topology. Connecting a Green LED (idle/safe status on GPIO 2), a Red LED, and an Active Buzzer (hazard status on GPIO 4) in parallel ensures that every component receives the full, un-dropped 3.3\text{V} needed to operate, avoiding the compounding voltage drops of a series layout (V_{\text{total}} = V_1 + V_2). ### 2. The Edge AI Vision Pipeline To track vehicles at a distance, we integrated a secondary ESP32-CAM module equipped with an OV2640 lens. Because the ESP32’s 520\text{ KB} of SRAM cannot locally compute deep convolutional neural networks, we designed a direct hardware bridge (UART) to stream binary frames to a localized laptop processor over a custom serial pipeline. On the host side, a Python engine receives the raw binary bytes, reassembles them using standard JPEG Start-of-Image (\xff\xd8) and End-of-Image (\xff\xd9) byte boundary delimiters, and streams the decoded frame arrays directly into an optimized YOLOv8 Nano neural network. The pipeline applies precise target classification filters targeting specific object classes (2: car, 3: motorcycle, 5: bus, 7: truck). ### 3. Mathematical Distance Estimation To calculate distance without heavy LiDAR hardware, the system leverages a focal-length pinhole camera geometry approximation model. The software tracks the bounding-box height of the classified vehicle in pixels (h_{\text{pixels}}) and maps it against a calibrated environment scaling constant (K_{\text{factor}}): Where K_{\text{factor}} is mathematically calibrated to account for the image frame resolution profile (e.g., QQVGA 160 \times 120 vs. QVGA 320 \times 240) and sensor optical dimensions. If d_{\text{estimated}} < 1.5\text{ meters}, a critical threat state is flags instantly. ## ⚡ Challenges Faced & Engineering Solutions ### Challenge 1: The Wireless Hotspot Security Wall Initially, we attempted to stream video from the ESP32-CAM over an HTTP Multi-part MJPEG server over local Wi-Fi. However, testing on local mobile hotspots consistently yielded catastrophic Connection timed out (Error -138) failures. We discovered that modern mobile operating systems enforce AP (Access Point) Isolation, creating a strict network firewall that prevents local connected devices from exchanging packets directly.
- The Solution: We bypassed the entire wireless network layer by re-engineering the camera firmware to dump raw compressed JPEG binary blocks directly down the physical USB-to-UART data wire (COM4). ### Challenge 2: Windows Latency & Buffer Corruptions Even over a wired serial connection, our Python window would freeze, lagging several seconds behind real-time. We traced this to Windows 10 allocating a default 16\text{ms} latency buffer to COM ports to bundle text lines, which inadvertently backed up our high-volume video stream. Additionally, reading huge chunk sizes (4096\text{ bytes}) caused packet fragmentation.
- The Solution: We manually altered the Windows Device Manager Advanced Port settings, dropping the Latency Timer down to 1\text{ms}. In the Python code, we utilized ser.in_waiting to dynamically pull whatever exact byte count was ready in the cache, and added an emergency threshold buffer flush (buffer.clear()) if corrupted noise exceeded 30\text{ KB}. ## 🎓 What We Learned Developing the AG~3 NEURO-PATH bridged the gap between pure code and environmental reality. We gained deep, practical experience in:
- Embedded System Architecture: Learning to debug low-level Espressif systems camera drivers, manage frame buffer allocation (fb_count = 2 for double-buffering), and handle hardware clock frequencies (XCLK).
- Optimizing AI at the Edge: Understanding how to strip down massive deep learning models into lightweight pipelines that can effectively run under real-world, latency-critical constraints.
- Human-Computer Interaction (HCI): Realizing that the ultimate goal of AI in transportation safety isn't just to maximize detection metrics, but to design cooperative intelligence that respects human cognitive boundaries, reduces sensory exhaustion, and actively eliminates the high "switch cost" of driver attention.
Built With
- aithinker
- arduino
- computervision
- cplusplus
- edgeai
- embeddedsystems
- esp32cam
- hci
- intelligentvehicles
- numpy
- opencv
- ov2640
- pyserial
- python
- sensorfusion
- uart
- ultralyticsyolov8
- vscode
- windows-10

Log in or sign up for Devpost to join the conversation.