

Inspiration:
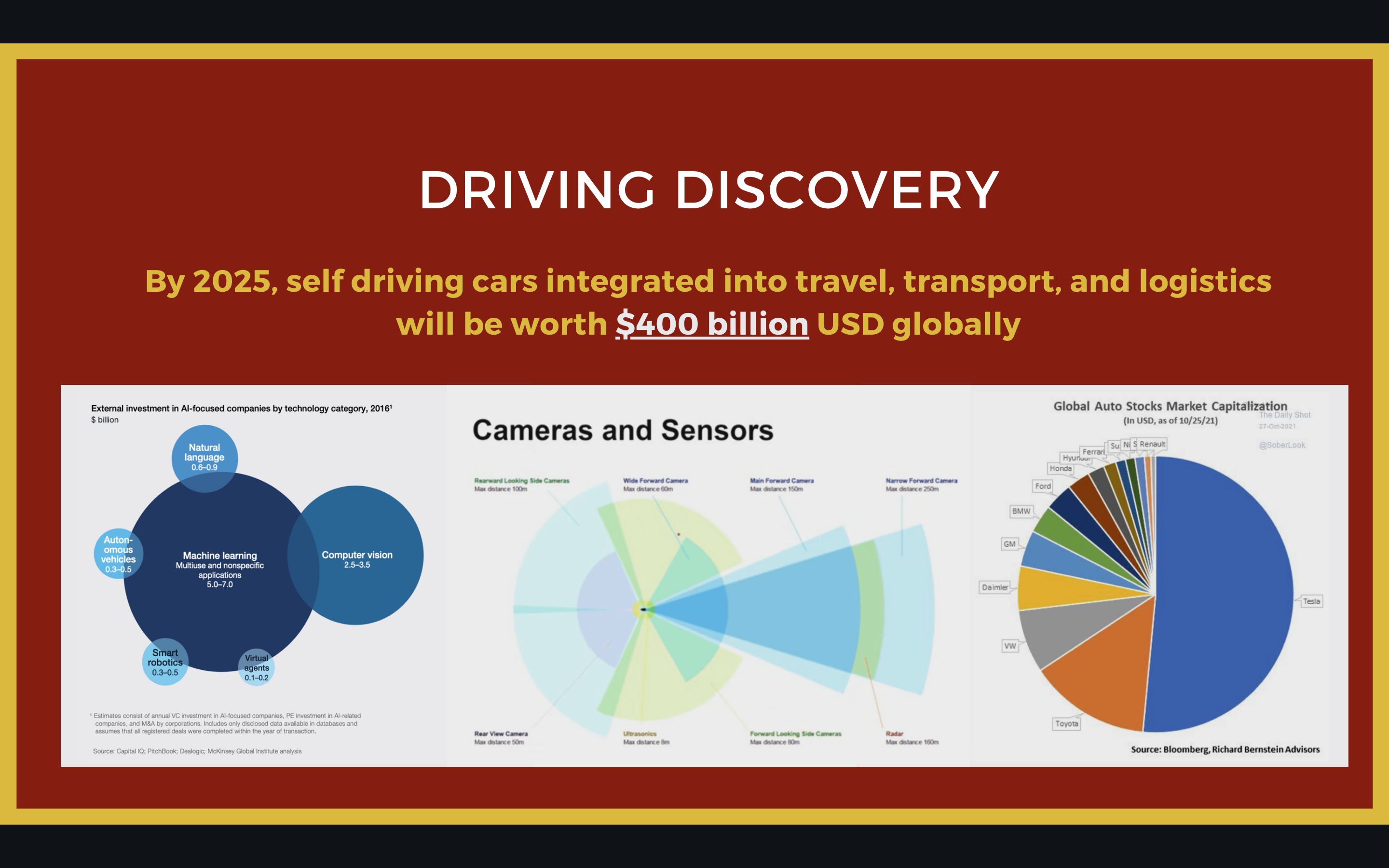
By 2025, self driving cars integrated into travel, transport, and logistics will be worth $400 billion USD globally impacting all our lives. Benefits of self driving cars to transportation includes:
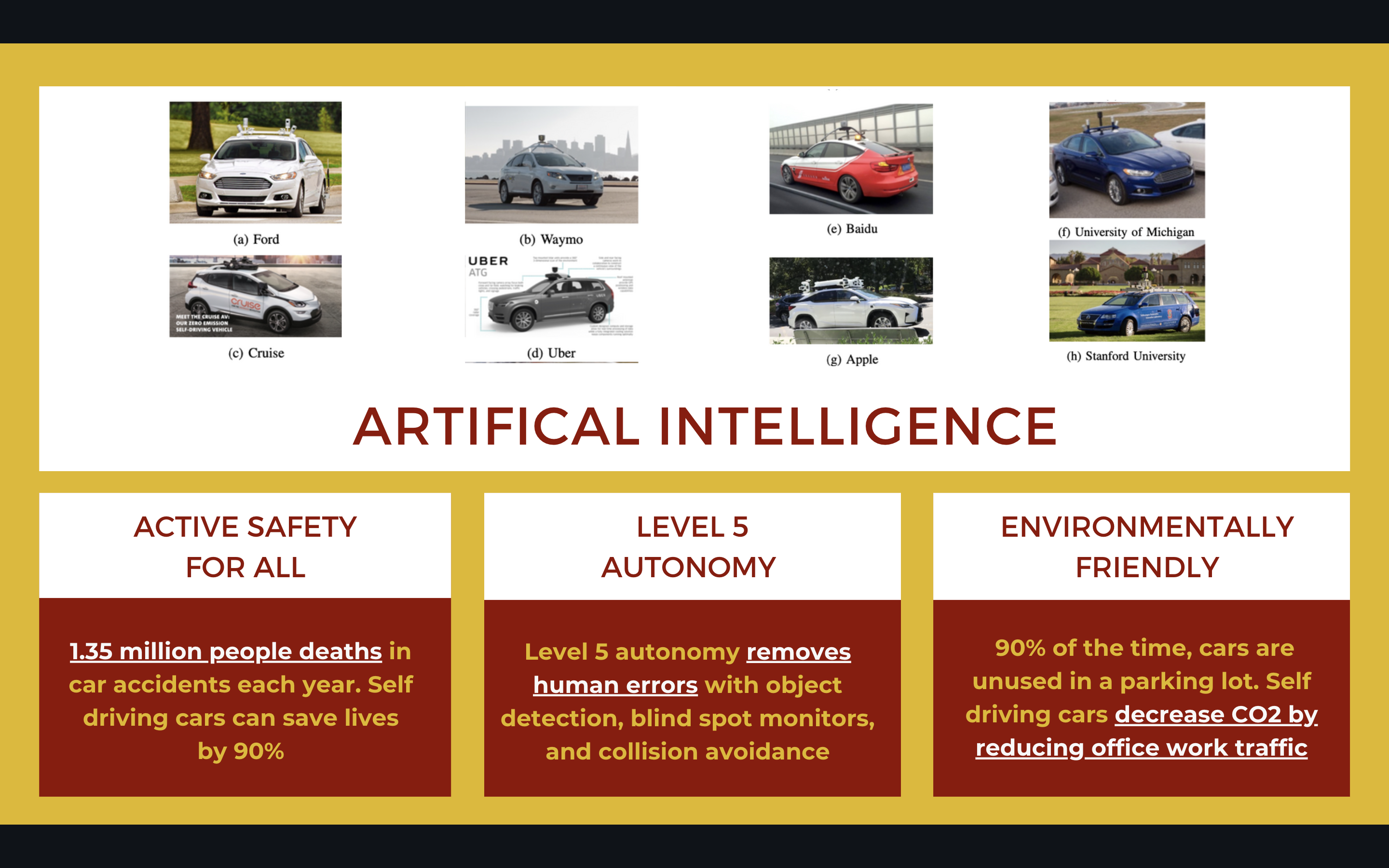
- 1.35 million people deaths in car accidents each year. Self driving cars can save lives by 90%
- Level 5 autonomy removes human errors with object detection, blind spot monitors, and collision avoidance
- 90% of the time, cars are unused in a parking lot. Self driving cars decrease CO2 by reducing office work traffic
What it does
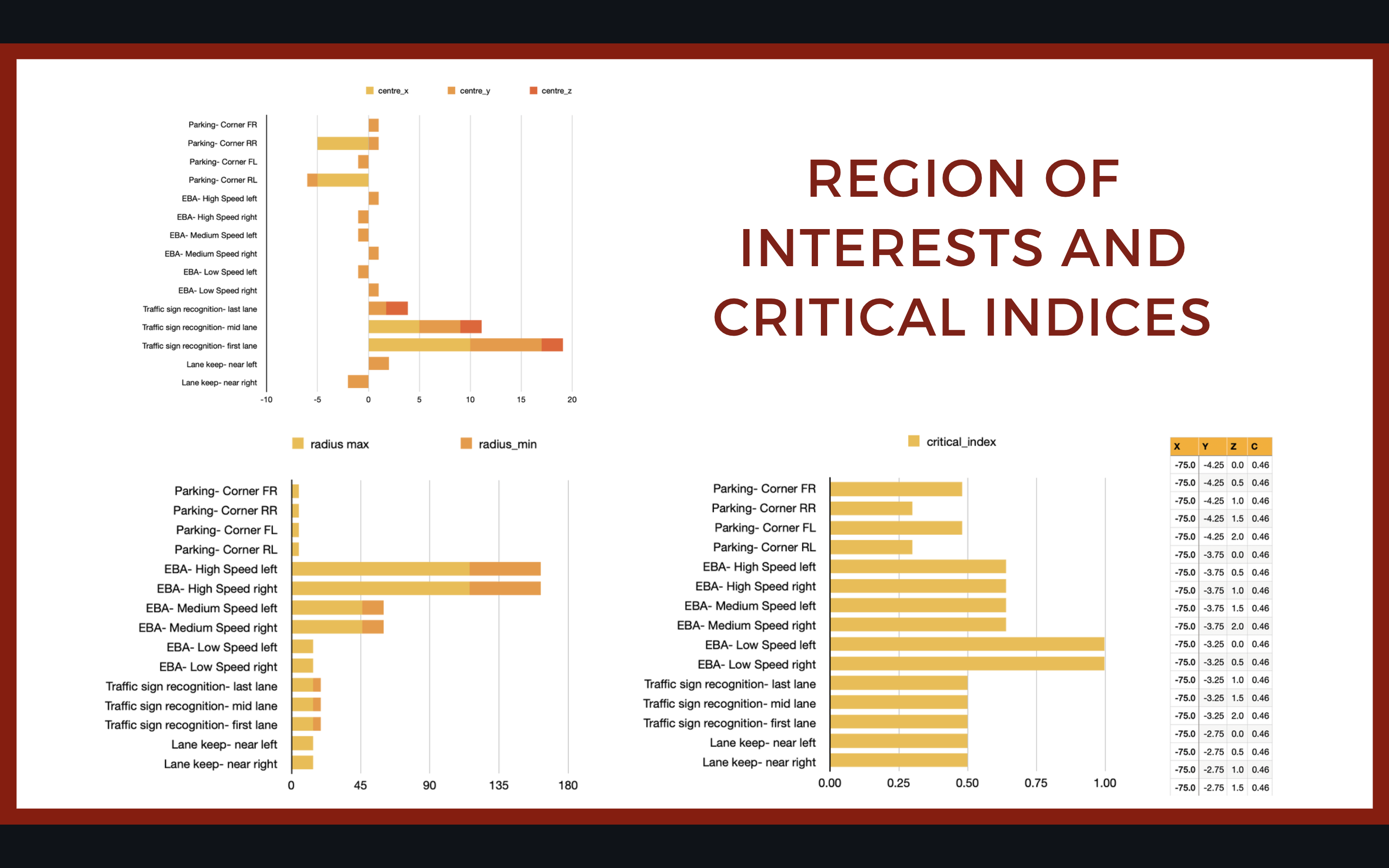
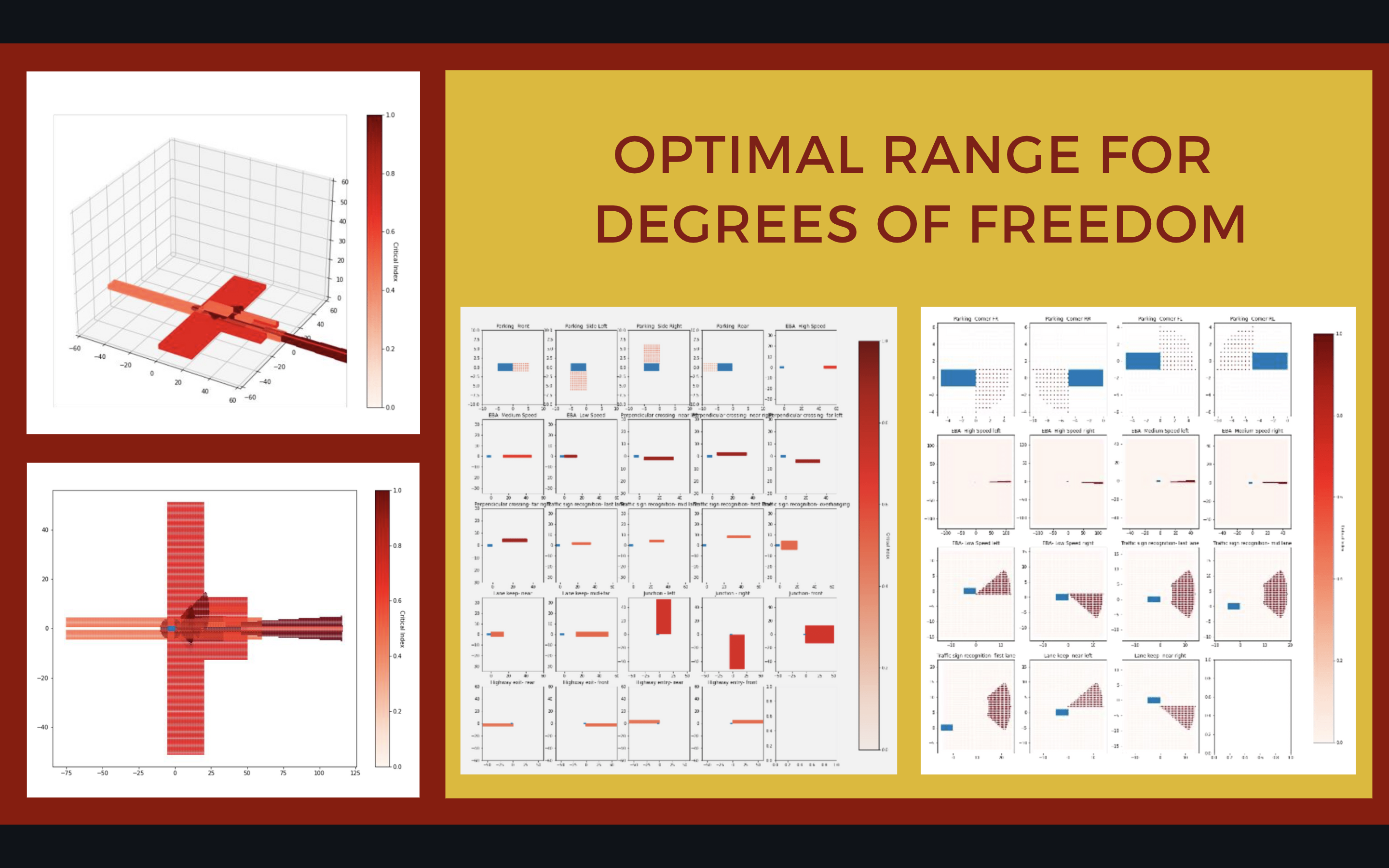
Drive discovery with Need4Speed. Self-driving car sensor configurations machine learning model optimized for maximum degrees of freedom:
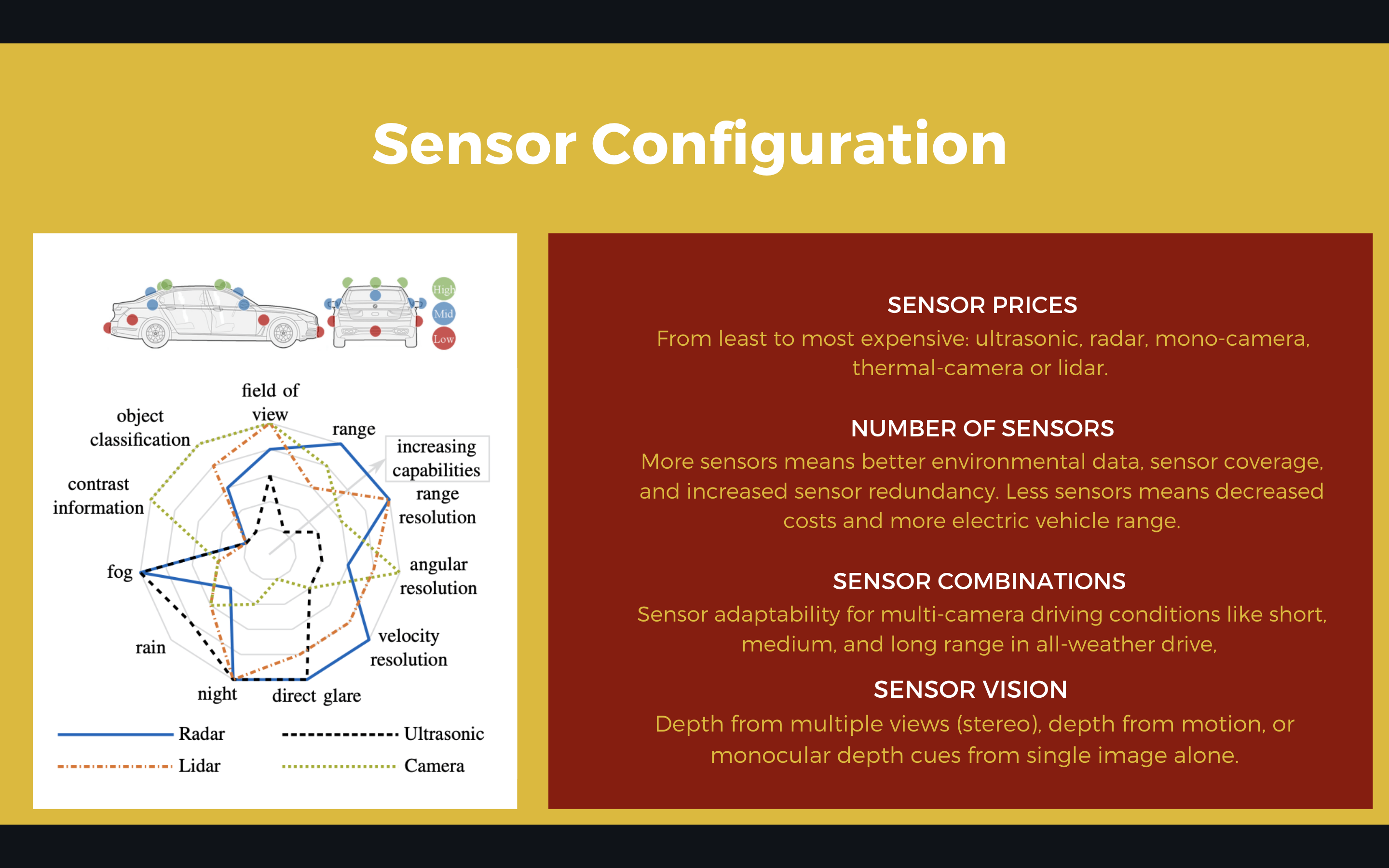
- From least to most expensive: ultrasonic, radar, mono-camera, thermal-camera or lidar.
- More sensors means better environmental data, sensor coverage, and increased sensor redundancy. Less sensors means decreased costs and more electric vehicle range.
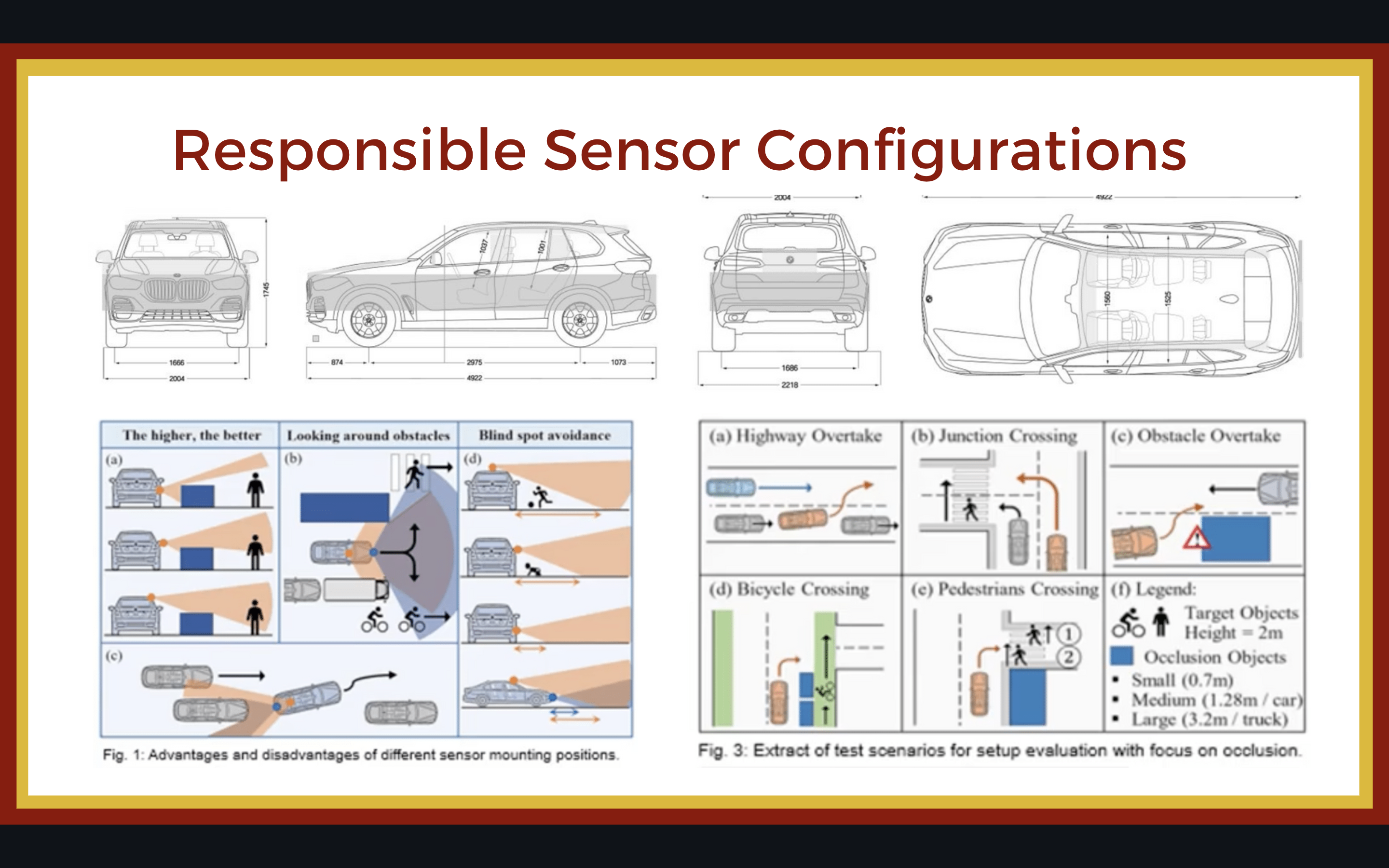
- Sensor adaptability for multi-camera driving conditions like short, medium, and long range in all-weather drive,
- Depth from multiple views (stereo), depth from motion, or monocular depth cues from single image alone.
How we built it
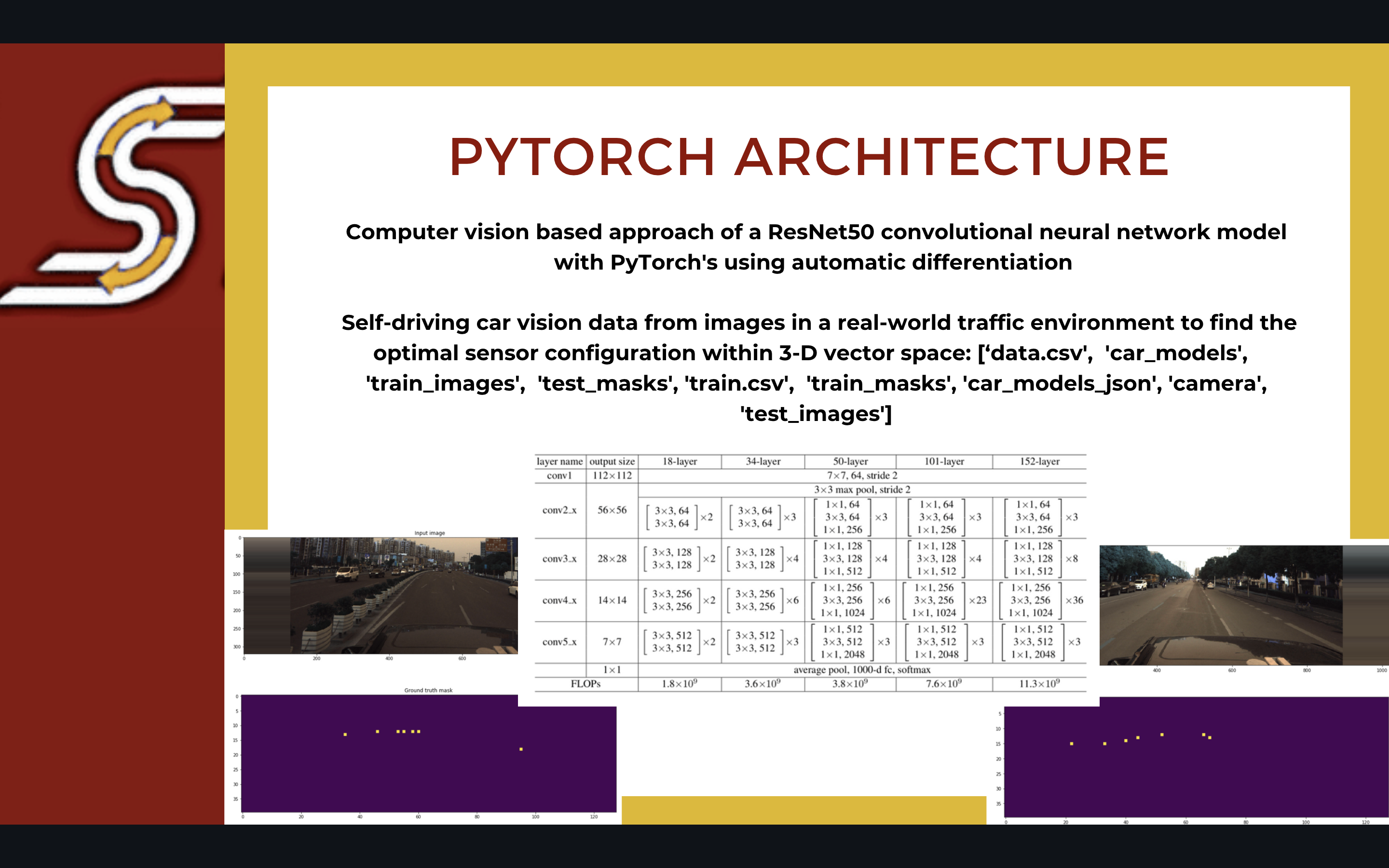
Computer vision based approach of a ResNet50 convolutional neural network model with PyTorch's using automatic differentiation
Self-driving car vision data from images in a real-world traffic environment to find the optimal sensor configuration within 3-D vector space: [‘data.csv', 'car_models', 'train_images', 'test_masks', 'train.csv', 'train_masks', 'car_models_json', 'camera', 'test_images']
Challenges we ran into
- Increase quality of data (ex. driving in different countries) and process of extraction, transformation and load
- Connecting to machine learning model to GPU and Amazon Sagemaker
Accomplishments that we're proud of
- Interesting problem space
What we learned
- Learning about ResNet50 algorithms
What's next for Need 4 Speed.
- Add self-driving car machine learning simulation model - passive and simulation tests
- Deploy to the cloud for self driving cars with TorchServe

Log in or sign up for Devpost to join the conversation.