-

-
-
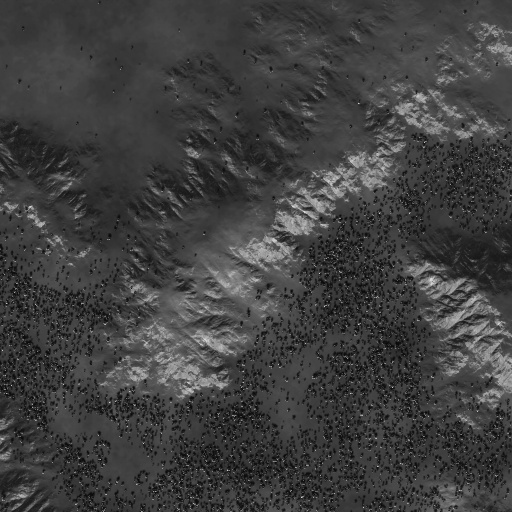
Partial crop of the hill
-
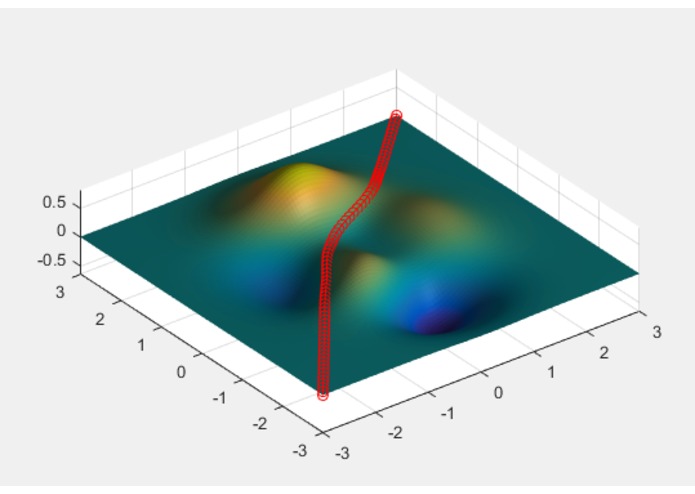
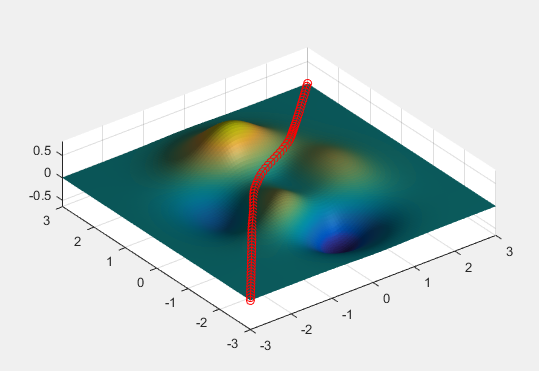
Navigation over 3D terrain without obstacles
-
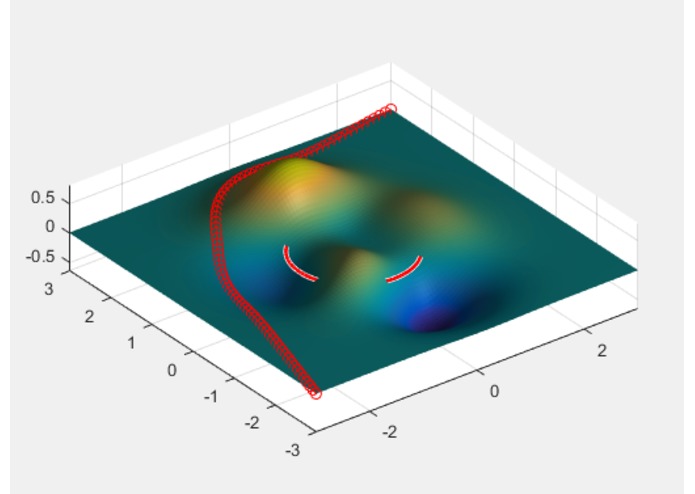
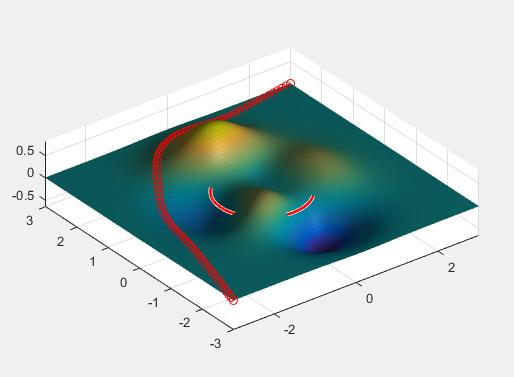
Navigation over 3D terrain with obstacle represented by red circle
-
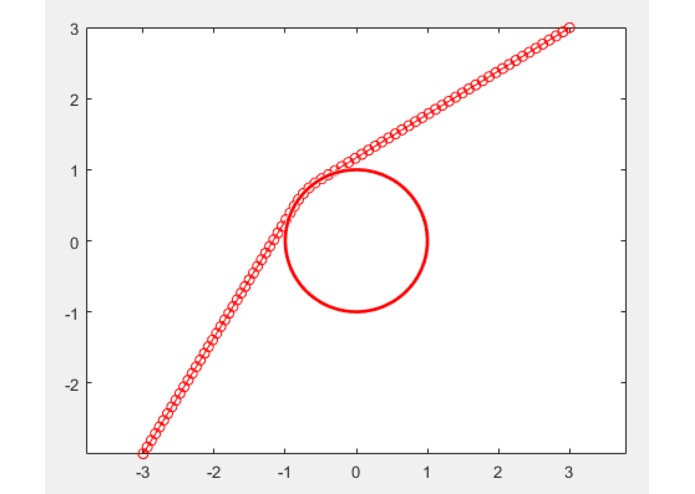
Navigation over 2D terrain with obstacle represented by red circle

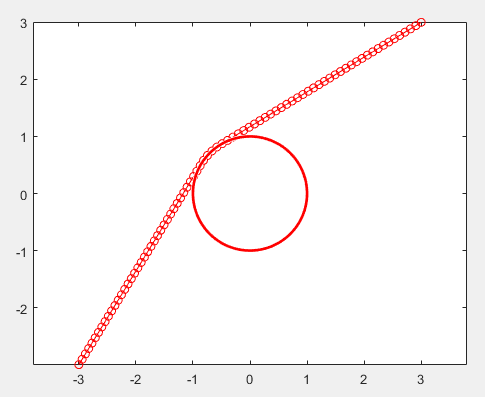
Inspiration
In events when search & rescue operations are necessary such as the collapse of a building due to an earthquake, military retrieval operations, etc. a small rover is typically used to navigate the terrain using 1D navigation. That is, only having the ability to see what is in front of it.
As time is of the essence in most of these operations, a way to speed it up is to use an aerial view to create a maze for a ground rover to traverse, while adding a layer of image and path correction on the ground view using cameras, and computer vision to give a minimum "2D navigation."
What it does
Navigates an unknown land terrain using a combination of aerial and ground data to find the shortest plausible route from an initial location of a ground robot to a known final destination.
How I built it
The terrains are simulated terrains from MATLAB and cost optimization is used to find a plausible route from the initial location to it's goal destination.
The land obstacles are identified using both OpenCV and Clarifai. Clarifai is used for identifying the objects in the image, using it's predict function to identify objects present in the image. To localize for specific objects, OpenCV iteratively crops the image into nxn images until only 1 object is in a particular frame.
Challenges I ran into
I had to reformat my laptop in the middle of the competition :(. Connection issues with Clarifai OpenCV not building Matlab missing packages.
Accomplishments that I'm proud of
It works, generally. It's highly expandable.
What I learned
Clarifai
What's next for Navifai
To integrate a train model for identifying the final destination or target. For example, for a search and rescue operation, one can find it advantageous to train a model to recognize the person's face (more specifically eye, nose region opposed to say, hair) through various images. Fix bugs


Log in or sign up for Devpost to join the conversation.