-

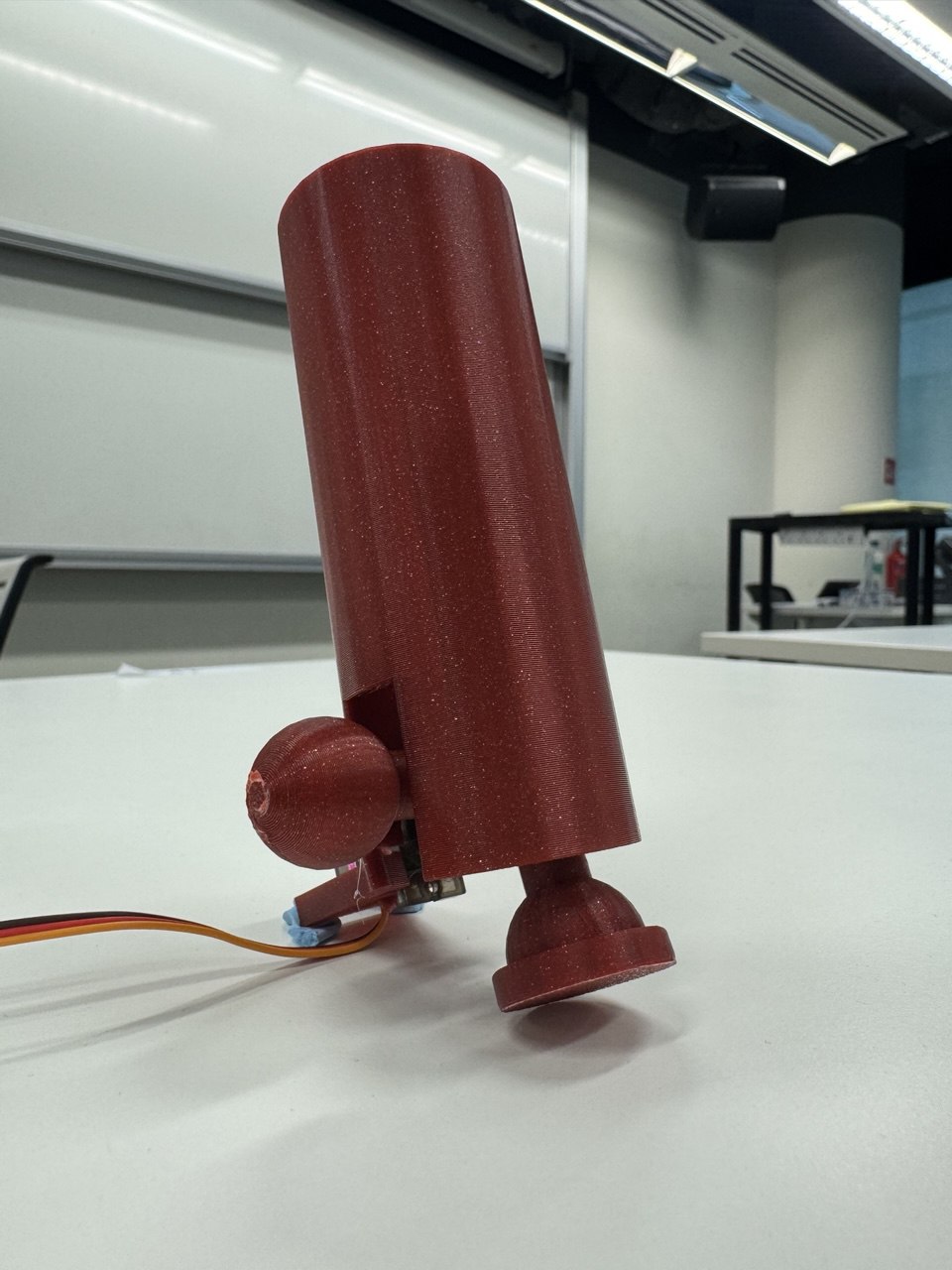
A model of our modular tip
Inspiration
The inspiration behind Navicane stems from the desire to empower blind and visually impaired individuals with greater independence and confidence in their daily navigation. Traditional canes, while invaluable, are limited in their ability to adapt to varying terrains, often requiring manual adjustment or compromise in usability. Navicane aims to bridge this gap by providing an automated, adaptable solution that ensures users can navigate effortlessly across different environments, from smooth sidewalks to rougher, uneven ground. This innovation seeks to enhance accessibility, reduce barriers, and promote inclusivity, allowing individuals to move freely with ease and safety.
What it does
Navicane is an innovative cane designed with customizable tip options, allowing blind and visually impaired users to select from three different tips that best suit their needs for varying terrains. Equipped with a built-in scanner, Navicane continuously monitors the ground, providing real-time alerts to users whenever there is a change in terrain, ensuring a smoother, more intuitive navigation experience. This smart design empowers users to move confidently across different environments with ease and precision.
How we built it
We developed a modular cane tip system that allows users to choose from three customizable tips, tailored to their specific needs. Using 3D printing, we crafted the tips and integrated a servo motor to enable automatic switching between them, based on the user’s indication of a terrain change. On the software side, we collected a range of terrain data and trained a computer vision model to accurately identify different surfaces. This model, once trained, is capable of detecting terrain changes in real-time. We also built a web application to demonstrate the model's ability to scan and classify the terrain. Additionally, we created a mockup of a mobile app, designed to allow users to personalize their Navicane, select their preferred tips, and easily customize their cane settings for optimal navigation across various terrains.
Challenges we ran into
We faced several challenges while designing our product, particularly with integrating electronic components like the camera for terrain detection. Due to time constraints, we were unable to develop a fully functional website to showcase our trained model. However, we’ve uploaded our Google Colab folder, which contains the successfully trained model that can be tested. Additionally, we’ve created a prototype of our website and a mockup of our mobile application, offering a detailed look at how our solution would work in practice.
Accomplishments that we're proud of
What we learned
What's next for Navicane
Built With
- 3dprint
- arduino
- classification
- computervision
- figma
- flask
- machine-learning
- python

Log in or sign up for Devpost to join the conversation.