-
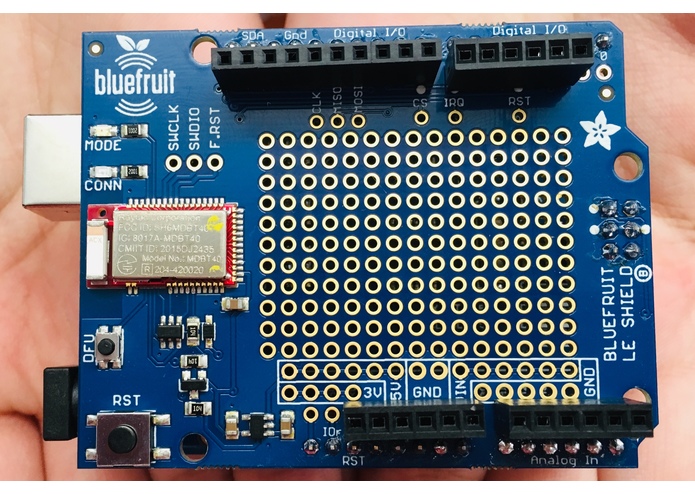
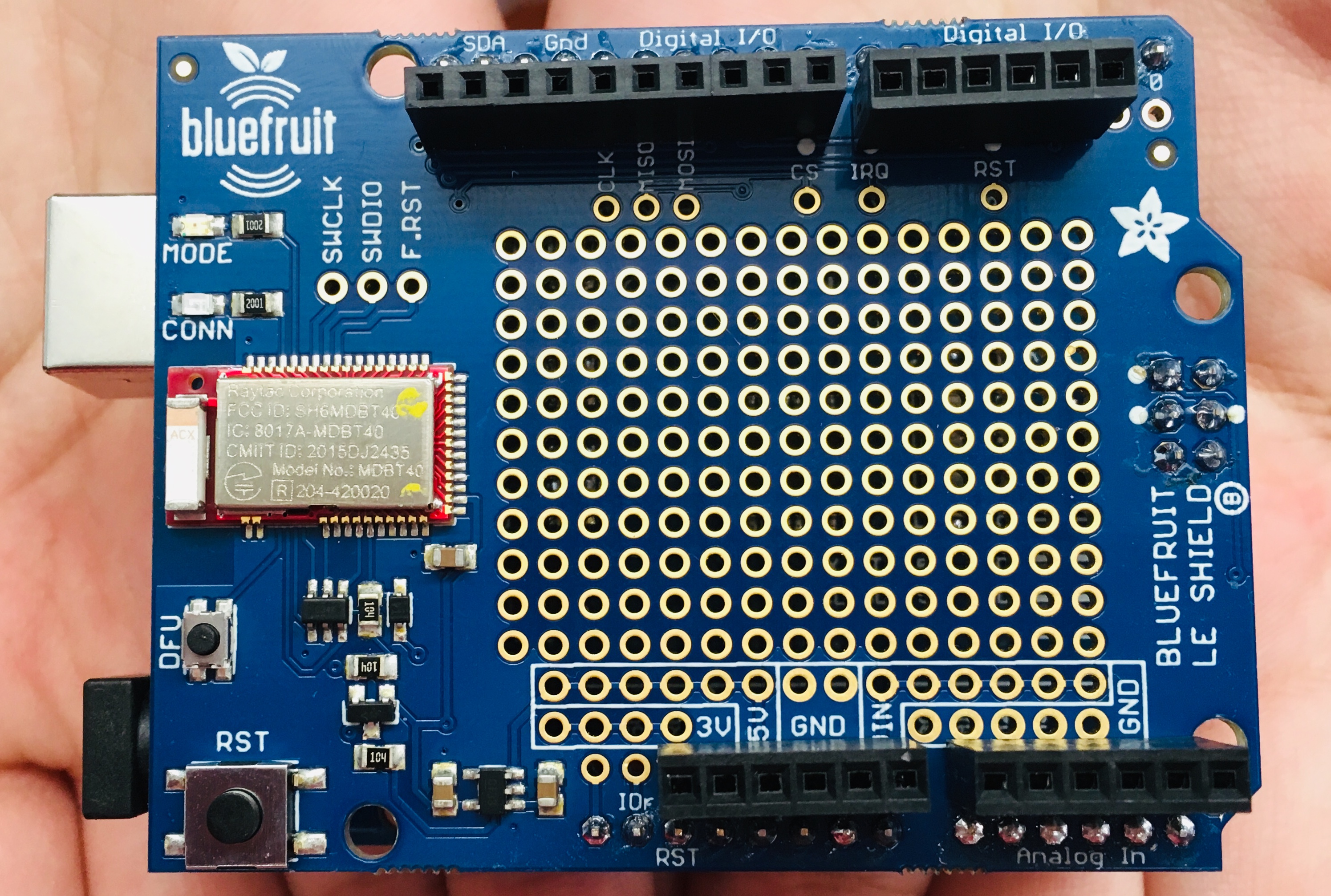
Bluetooth Module
-
Side view of Bluetooth Module
-
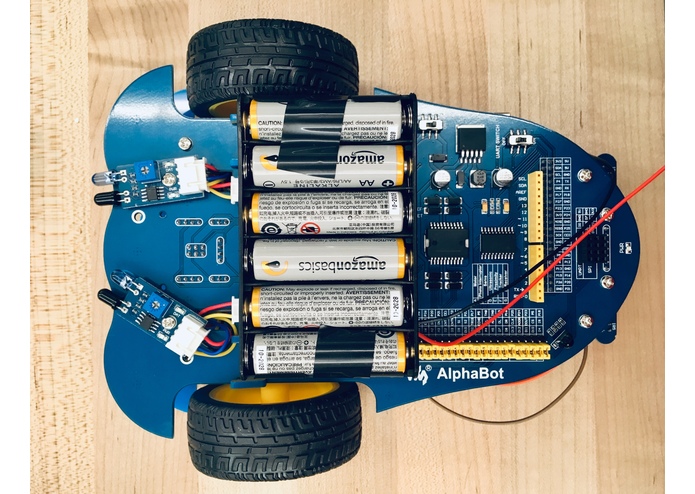
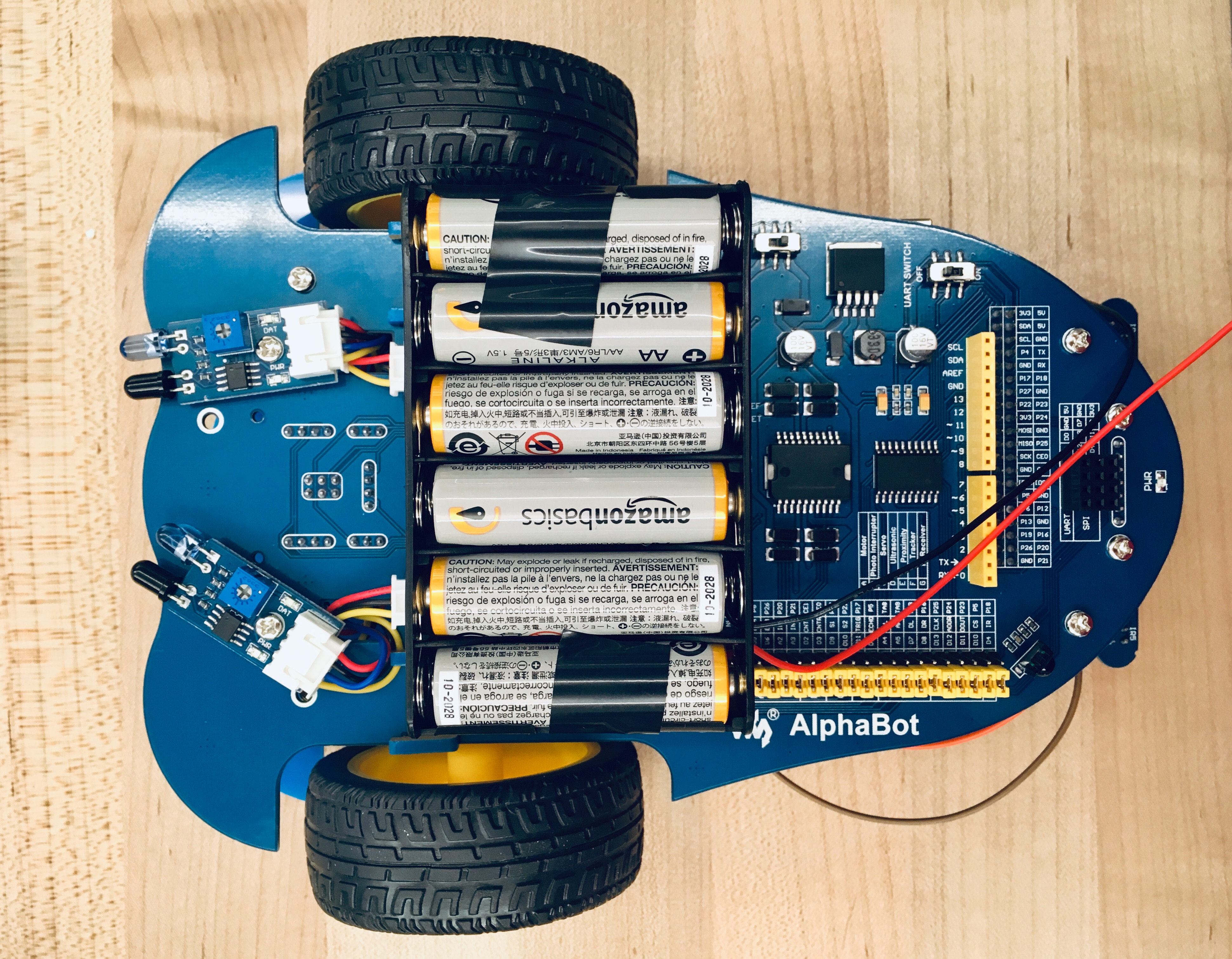
Top view of the robot
Inspiration
Our vision for Navibot was to create a machine that is unique, creative, and can be used in numerous applications in the real world. Through numerous visits and volunteer hours at hospitals in the GTA, our team identified a challenge in the navigation through the different departments and floors for new visitors and patients, who may be unfamiliar with the building, or generally have a difficult time reading maps or finding volunteers for assistance. As such, in the spirit of connectivity, our team chose to design a robot that will help connect people to where they need to go with ease.
What it does
Navibot is a guidance system that helps visitors or patients navigate their way in any new building, which in this specific application is a hospital. When a visitor asks a nurse or a volunteer for directions to a specific department, the nurse is able to call the robot via bluetooth and direct it to the visitor, who can then follow the guidance robot to their desired destination.
How we built it
Using a robot chassis, the team used an Arduino Uno to program the infrared light sensor and Bluefruit Le Shield to support the bluetooth component of the robot. Motors were integrated with the bluetooth module and the IR sensor to respond to instructions provided by the user.
Challenges we ran into
One of the main challenges encountered during the design process was the light tracking and bluetooth configuration, especially in terms of tailoring the code to our specific applications.
Accomplishments that we're proud of
We're proud of having been able to integrate bluetooth configurations into our design, this being our first attempt to do so. Additionally, we are proud of our work as a team over the past 24 hours to create a functional prototype of our idea.
What we learned
The design and assembly of Navibot was a valuable learning experience that further developed our skills in Arduino and bluetooth integration to design an autonomous robot.
What's next for Navibot
Navibot's premise can be expanded well beyond hospitals and can be supplied with numerous new features to enhance its performance. University campuses, tourist destinations and other public locations can make use of Navibot to help visitors find their way. Next steps include an autonomous robot that can be pre-programmed with a map such that it can find its way without guidance or instructions from an employee. Additionally, later stages of development can include voice recognition, such that the visitors themselves can communicate directly with the robot and notify it to where they need to go. Data collection through cloud platforms, as needed by organizations, can be incorporated as well, such that information about visitor preferences can be used to better tailor services provided by these organizations.

Log in or sign up for Devpost to join the conversation.