Inspiration
We decided that this robot would be beneficial for blind people It will allow them to avoid obstacles in the surrounding, and it also works like a service dog.
What it does
A robot that avoids obstacles and moves back in the opposite direction. The ultrasonic sensor senses obstacles in its path which alerts the robot to stop.
How we built it
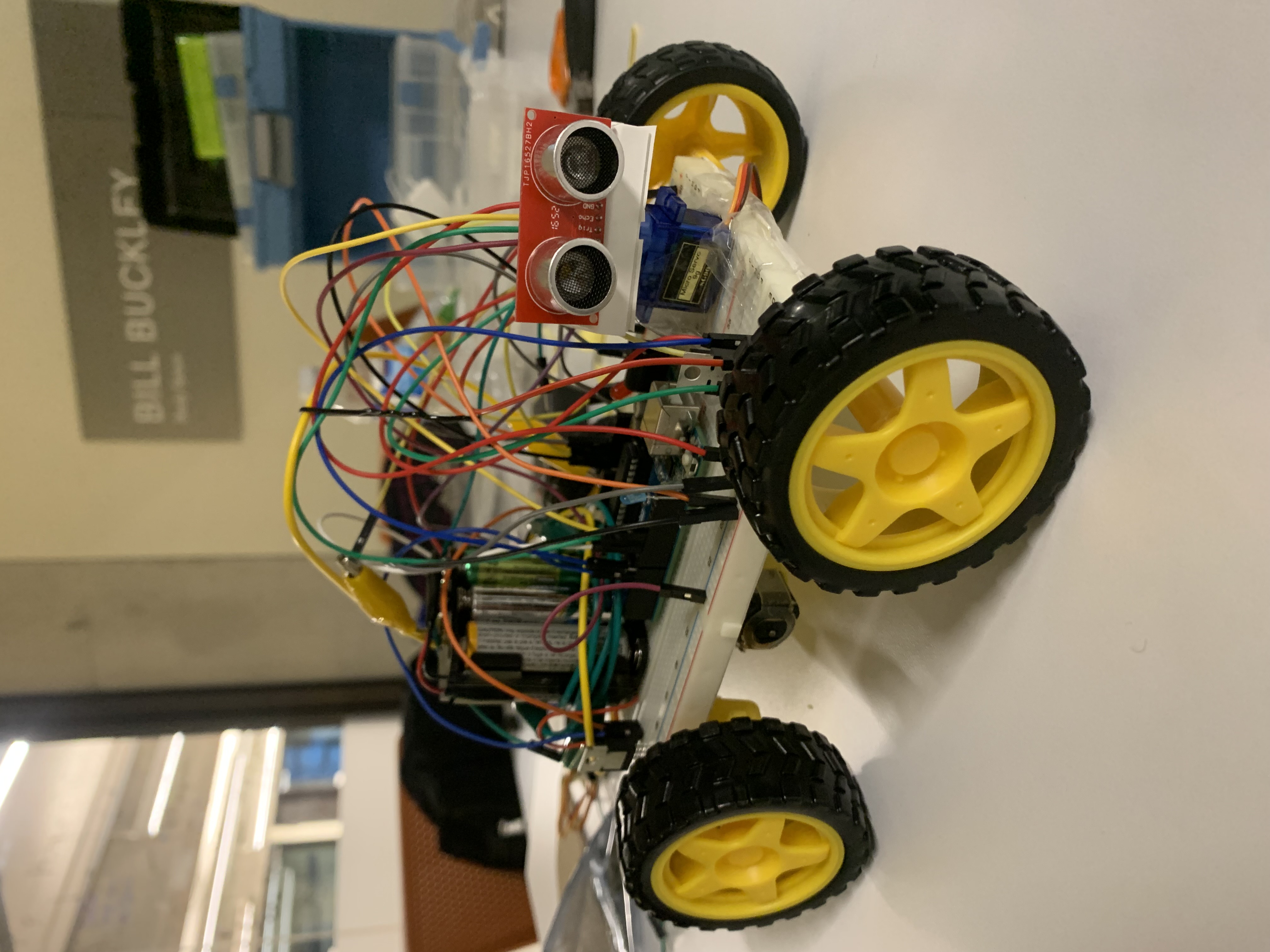
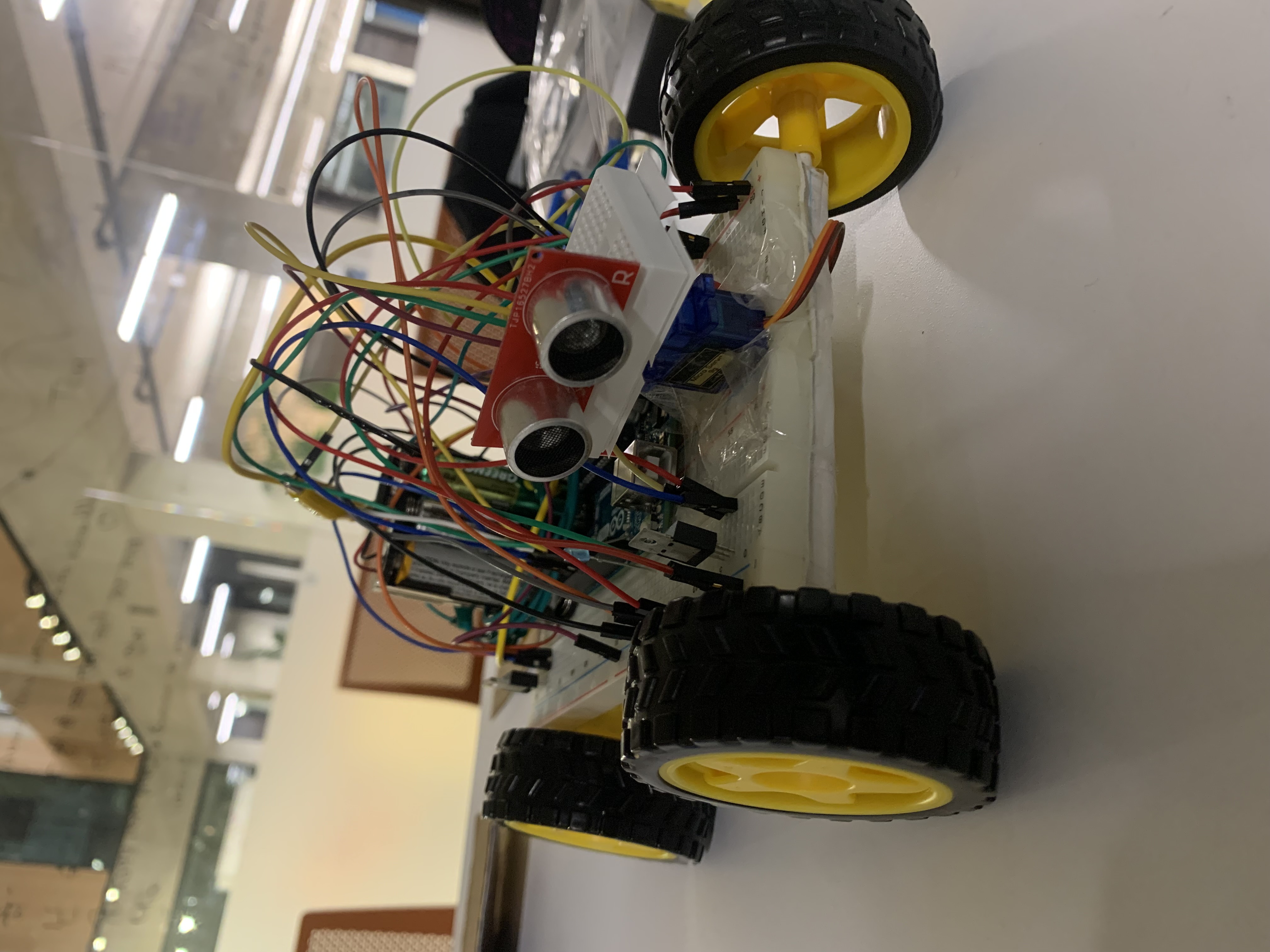
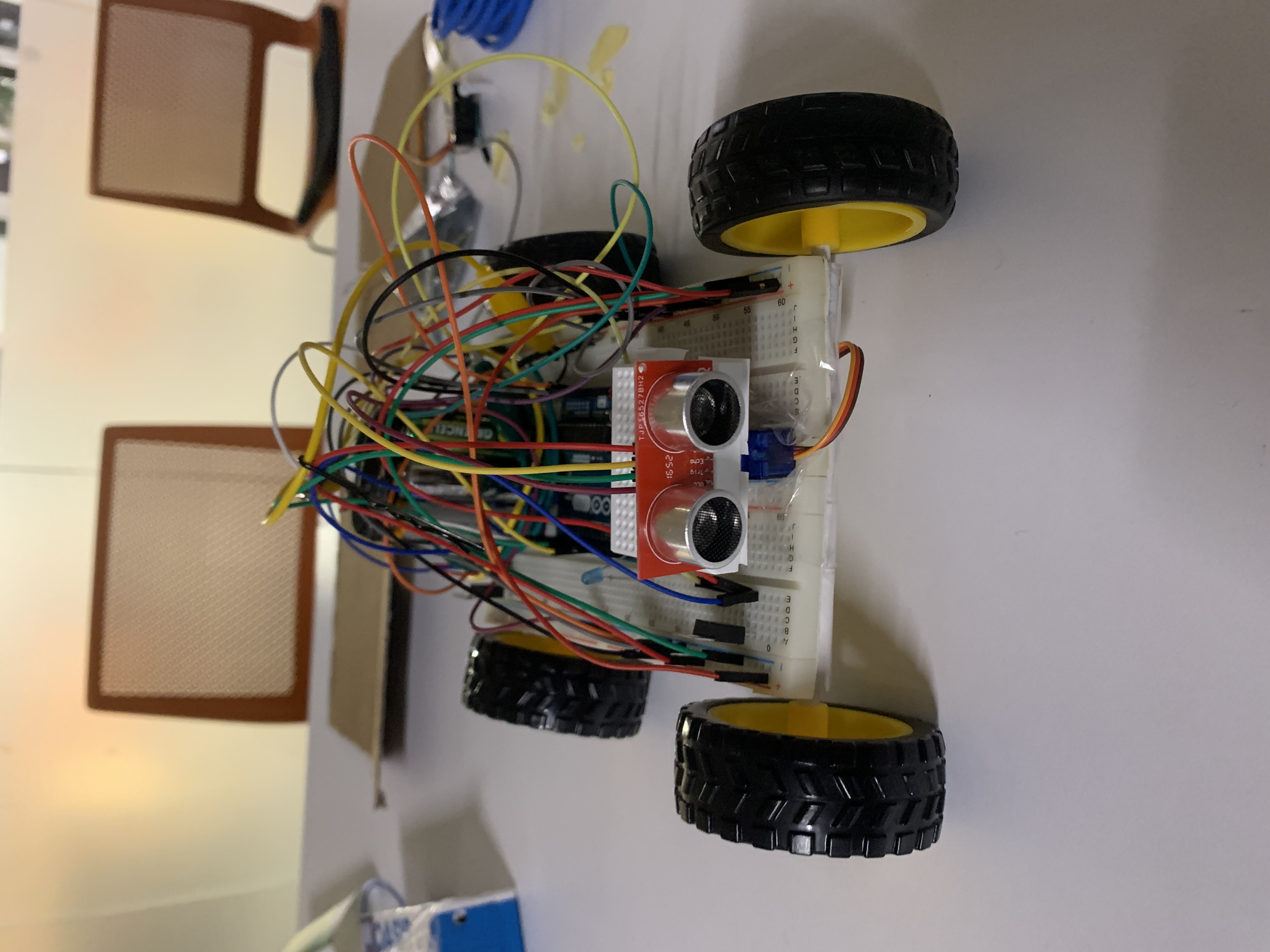
We built it using a 4 wheel robot that consists of a breadboard, ultrasonic sensor, Arduino Uno, DC motor, Servo, and multiple wires.
Challenges we ran into
Missing hardware components Specific hardware components not working, debugging errors faced in the code, working with the ultrasonic sensor
Accomplishments that we're proud of
We are proud that we were able to get our robot working without knowing anything about Hardware.
What we learned
We have learned a lot about the Arduino Duo kit and the ultrasonic sensor.
What's next for NAVBOT
The speaker gives a description of the type of obstacle, so the person is alerted in a better way, increases the size of the robot, and uses advanced equipment for more proficiency.

Log in or sign up for Devpost to join the conversation.