-
-
Tactical NAV demo: A 60-mph westbound transit on RT-72 with a vector grid and a countdown of 11.1 miles to the next mission decision point.
-

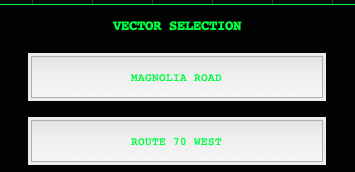
Vector selection here is basically a hands-free user choice of which navigation path (vector) to take at an intersection or decision point.
Inspiration
Traditional GPS apps treat drivers like robots, barking commands and forcing a single "optimal" path. As a commuter who prefers autonomy, I wanted to build a system that respects human intuition. NAV was inspired by the idea of a "Co-Pilot" rather than a "Commander"—providing options and allowing the driver to lead the way while the software adapts in the background.
What it does
Unlike standard navigation that locks you into a route before you put the car in drive, NAV is a dynamic mission assistant. It provides real-time "Vector Selections" at key intersections, letting the driver choose their preferred path (e.g., The Boulevard vs. Central Avenue).
Voice-First Logic: Uses a hands-free voice engine to brief the driver on upcoming choices.
Adaptive Rerouting: Automatically recalculates mission parameters based on the driver's real-time decisions.
Safety Protocols: At critical junctions with no alternatives, the system provides clear guidance to ensure the destination is reached efficiently.
How we built it
The core engine was built entirely in Python.
Frontend: A custom-rendered Tkinter Canvas that simulates a tactical radar display.
Backend: A branching state-machine logic that handles route transitions.
Geospatial Math: We implemented the Haversine Formula to track high-precision distances between coordinates without relying on external mapping APIs.
Challenges we ran into
The biggest technical hurdle was the map rendering. The original prototype used high-resolution map tiles, but slow Wi-Fi caused significant lag during the live simulation. We pivoted by building a minimalist "Radar Scanner" interface from scratch. This not only solved the latency issues but actually created a more focused, distraction-free UI that better fits the "Mission Assistant" theme.
Accomplishments that we're proud of
We are incredibly proud of the asynchronous threading system. It allows the voice engine to speak without freezing the map animation—a common hurdle in Python GUI development. Achieving a smooth, logic-driven navigation flow as developers was a major win.
What we learned
This project taught us the importance of Human-Centered Design. We learned that software is most powerful when it assists human decision-making rather than replacing it. Technically, we deepened our understanding of coordinate math and multi-threaded programming in Python
What's next for NAV — NAVIGATION ASSISTANT VOICE
The next steps for NAV are to make it an app that works on a mobile interface and uses real-time location and navigation software to stand out as a competitor against other Navigation and Mapping Software.

Log in or sign up for Devpost to join the conversation.