-
-
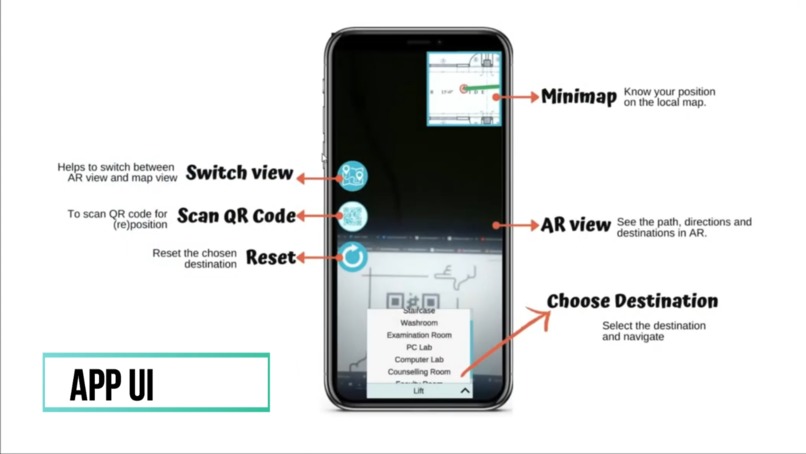
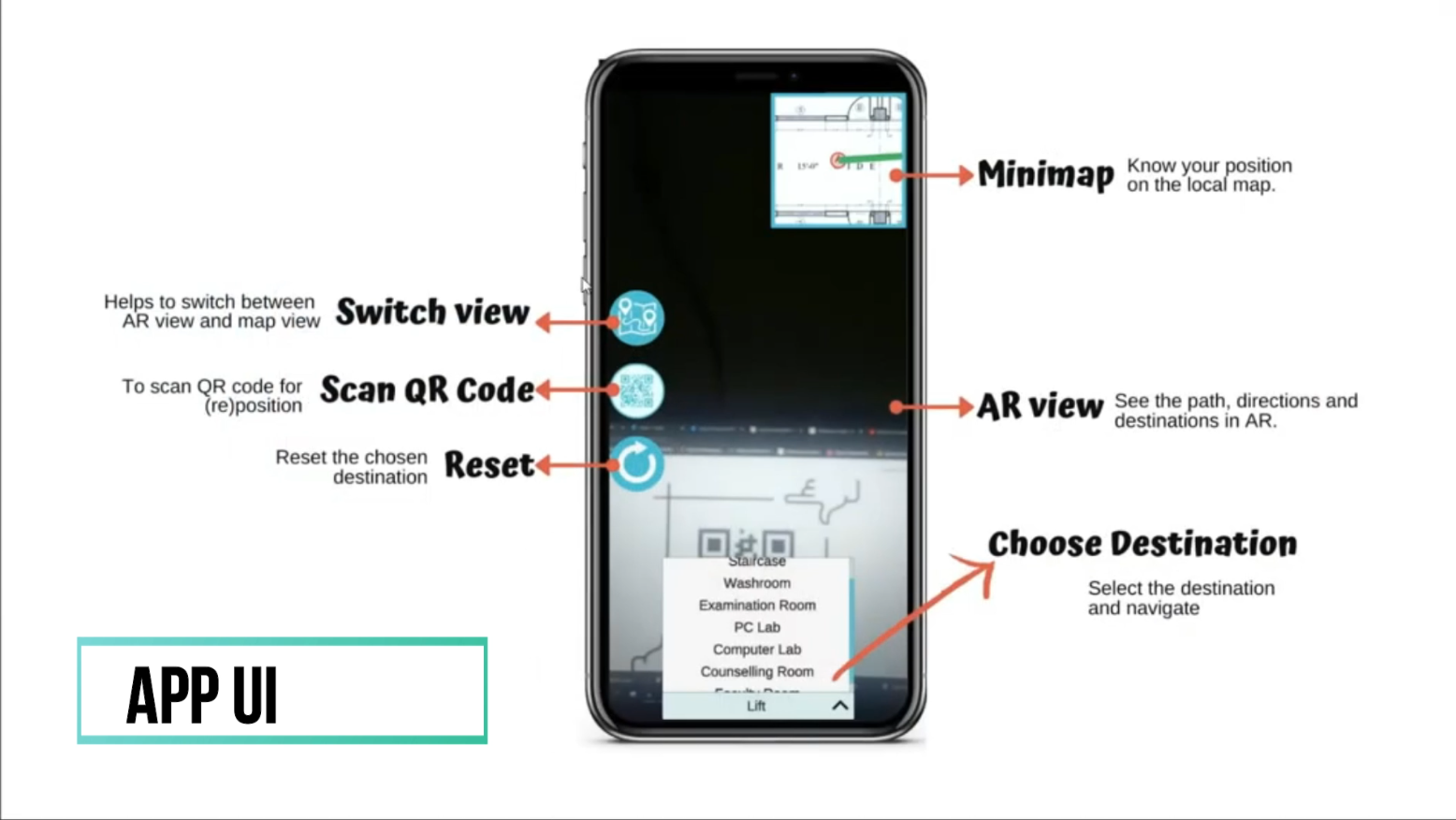
APP UI
NAV-AR

What is NAV-AR ?
NAV-AR is a mobile application that delivers highly accurate indoor mapping and navigation using Augmented Reality built on the principles of SLAM.
Inspiration
In this age almost every inch of our world is already mapped. You’ll navigate using google maps or some other GPS app. However, once you reach your destination and go indoors, GPS has no line of sight and you go back for asking directions. This is where NAV-AR “comes into play”.
How We built it
We built Nav-AR by use of SLAM i.e., Simultaneous Localization and Mapping, a computational technique that involves the task of constructing an internal map of an unknown area whilst keeping track of its position inside the area. Next we rendered the map and made use of A* pathfinding algorithm for finding shortest path. To deliver a highly interactive Augmented Reality Experience, we used Unity Engine and Google ARCore. Lastly we made use of a QR code scan mechanism for calibration and localisation purposes.
Installation Instructions :
For detailed instructions.. click here
Our Team built NAV-AR using :
- Unity
- Google ARCore
- SLAM
- C#
- A* Pathfinding algo

Log in or sign up for Devpost to join the conversation.