Inspiration
We wanted something creative and challenging, but above all, something that would be fun to make. After wasting five hours on a fruitless effort, we turned to the glory that is the Myo armband. Gesture control and robotics -- truly an electrical engineer's dream. Combined with the infrared sensing capabilities of the Leap Motion, we knew we had a smash hit--literally. This thing smashes into everything. It's annoying. Please make it stop.
What it does
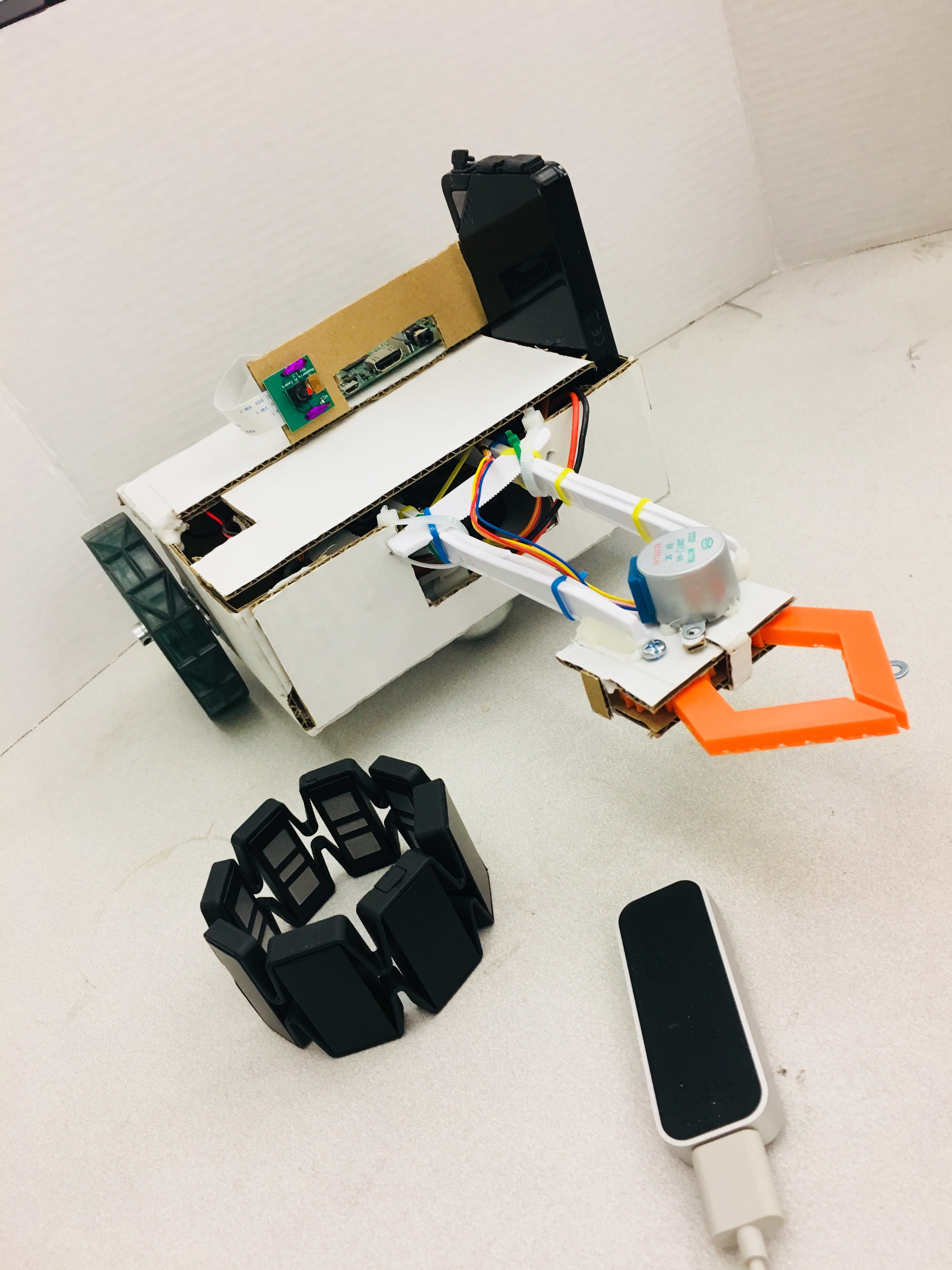
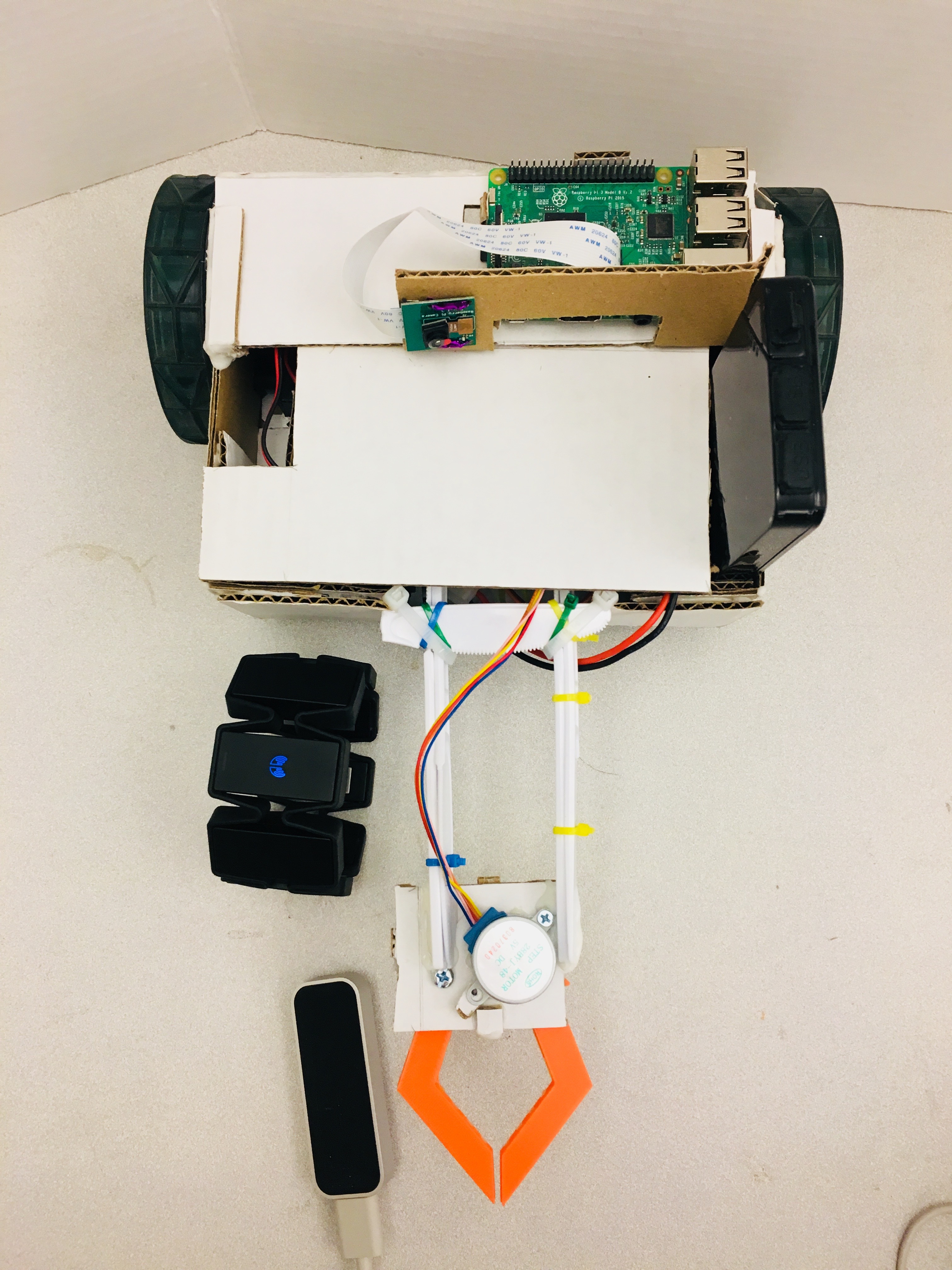
The motor drive capabilities are controlled with a Myo-armband. Due to time constraints, no additional gestures could be added to the library. Fortunately, the robot was perfectly controllable with the gestures already in place. The gripping claw was created via TinkerCAD and was handed off to the hardware team to print. Again, due to time constraints, we realized there was no time for an entire arm mechanism to be made. In the spirit of Hackathons, the arm and braces are made entirely out of zip-ties and plastic butter knives from dinner. The claw movement is dictated by the Leap Motion. Originally, the claw was going to possess at least 4 degrees of freedom and the Leap would have read in X, Y, and Z space. Once again, time constraints pushed us in the direction of directly mounting the arm onto the chassis and making it stationary.
How we built it
The chassis is made of cardboard, two aluminum plates and a metal caster. The claw was 3-D printed, courtesy of the hardware team. The arm and brace framework was made of butter knives and zip-ties. The Leap Motion outputs a signal via Bluetooth that triggers a response from a Raspberry Pi Zero W to drive the stepper motor and open/close the claw. The Myo armband connects to an HC-06 Bluetooth module on the Arduino and sends a string of characters describing the current pose the user is making: rest, fist, waveOut, waveIn, fingersSpread, and doubleTap. The Vex gear-motors are driven by the L289N motor driver.
Challenges we ran into
Designing the claw mechanism was time-consuming and filled with many design flaws that couldn't be rectified in the given time-frame. Many components that are important and should be rigid were made with cardboard. On the sensor side of things, the Leap Motion had trouble with establishing a connection between the device and the Pi Zero W. The Myo armband had trouble connecting to the serial terminal for some time and the Arduino had trouble with uploading code while the Bluetooth module was plugged in.
Accomplishments that we are proud of
Despite not being able to sense movement in all XYZ planes, we are very proud of being able to track hand movement on the Leap Motion and transmitting information through a TCP/IP protocol. We are also very proud of the way the physical robot turned out. It definitely could have gone much worse.
What we learned
We learned more about a wide variety of electronics and their functionality. Some members learned about TCP/IP protocols, others learned about the basics of Bluetooth networking.
What's next for Mr. Myogi
A better gripping-claw mechanism that runs on at least 4-degrees of freedom instead of (technically) 1. We would also like to add more custom gesture control for the Myo armband and begin tracking hand movement in 3D space and mapping directly to an array of servo motors.
Built With
- 2-servos
- 2-vex-motors
- arduino
- butter-knives
- cardboard
- caster
- leap-motion
- myo
- raspberry-pi-3
- raspberry-pi-zero-w
- tinkercad-claw


Log in or sign up for Devpost to join the conversation.