Inspiration
I was lying in bed after national science fair 2015, thinking about one of the projects. A kid in grade 8 built a prosthetic hand that you could control with your other hand. This didn't make any sense to me - you just get one prosthetic hand instead of one real hand and a prosthetic one. This idea got me started thinking about other ways you can control prosthetic hands.
Implanted prosthetic hands are obviously the best way to go. They work by connecting electrodes to nerves via surgery, very similar to a real hand. However, it's incredibly expensive. Surface electrodes work for below elbow prosthetic hands, but if you also have a prosthetic forearm this can obviously not work.
So, I asked the question: how can we control prosthetic hands in an affordable way that doesn't require the loss of other bodily functions (using another hand).
What it does
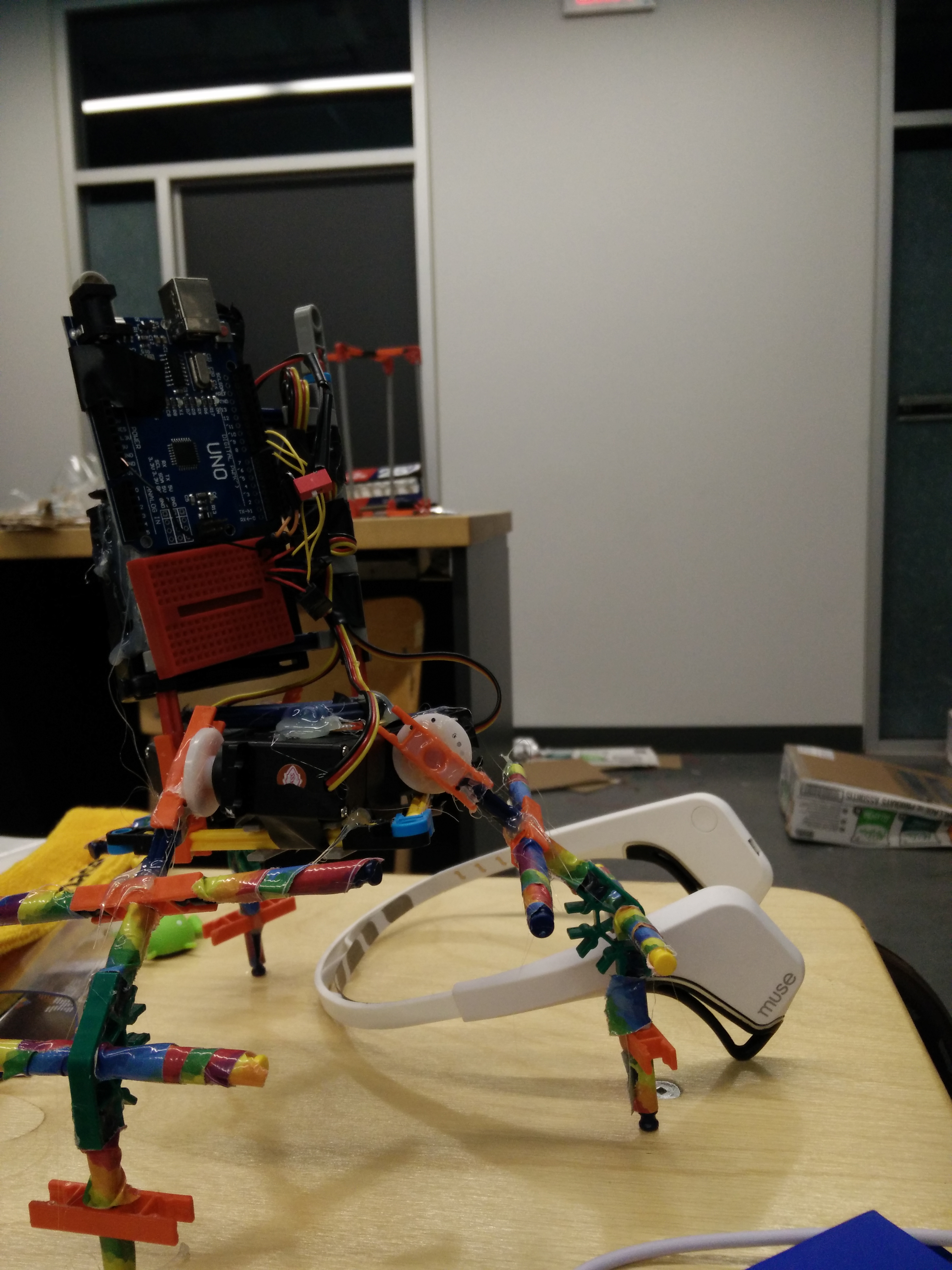
Muse grip is a system that listens to jaw clench patterns and translates them into the clenching and releasing of a prosthetic hand.
How I built it
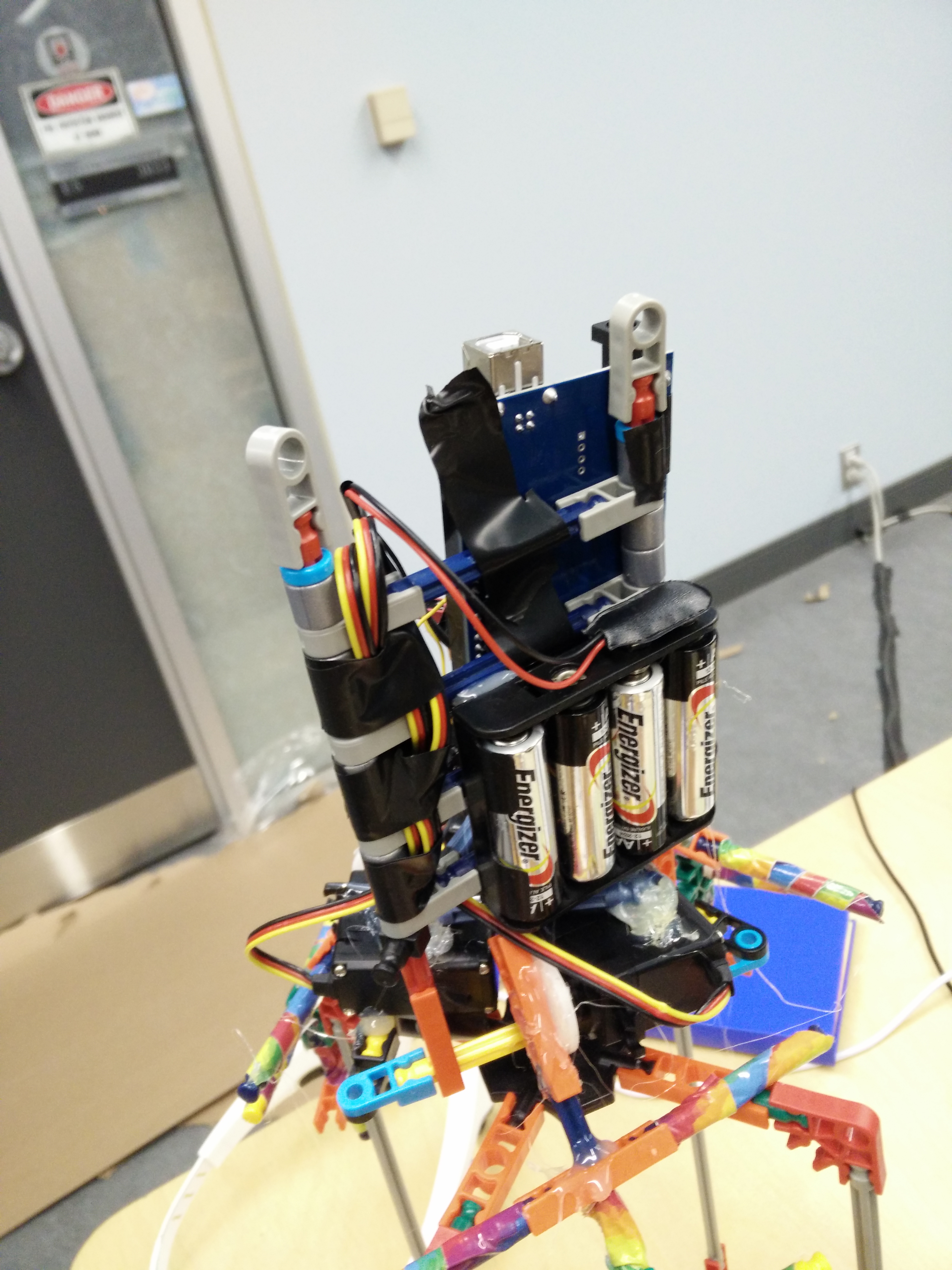
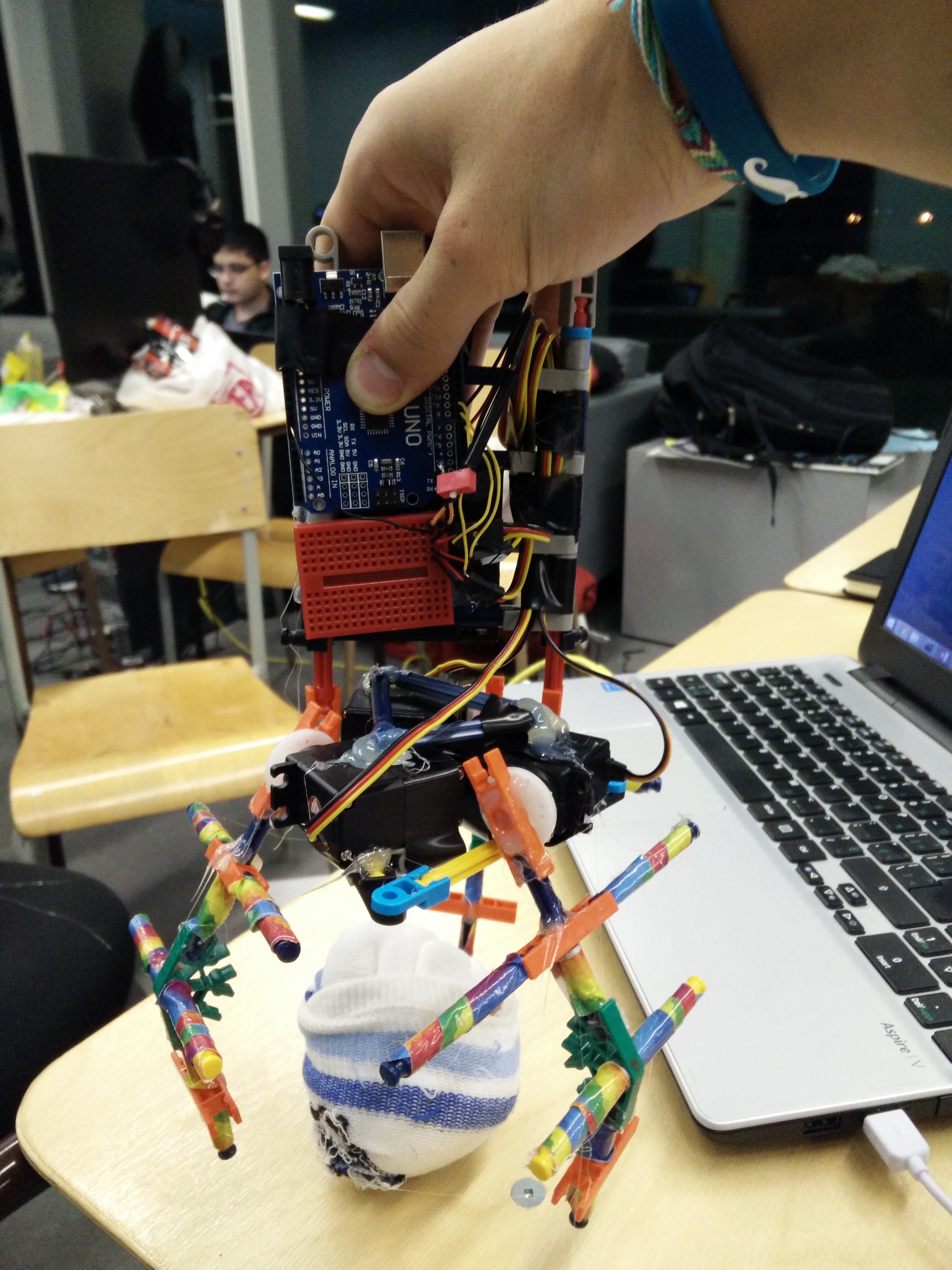
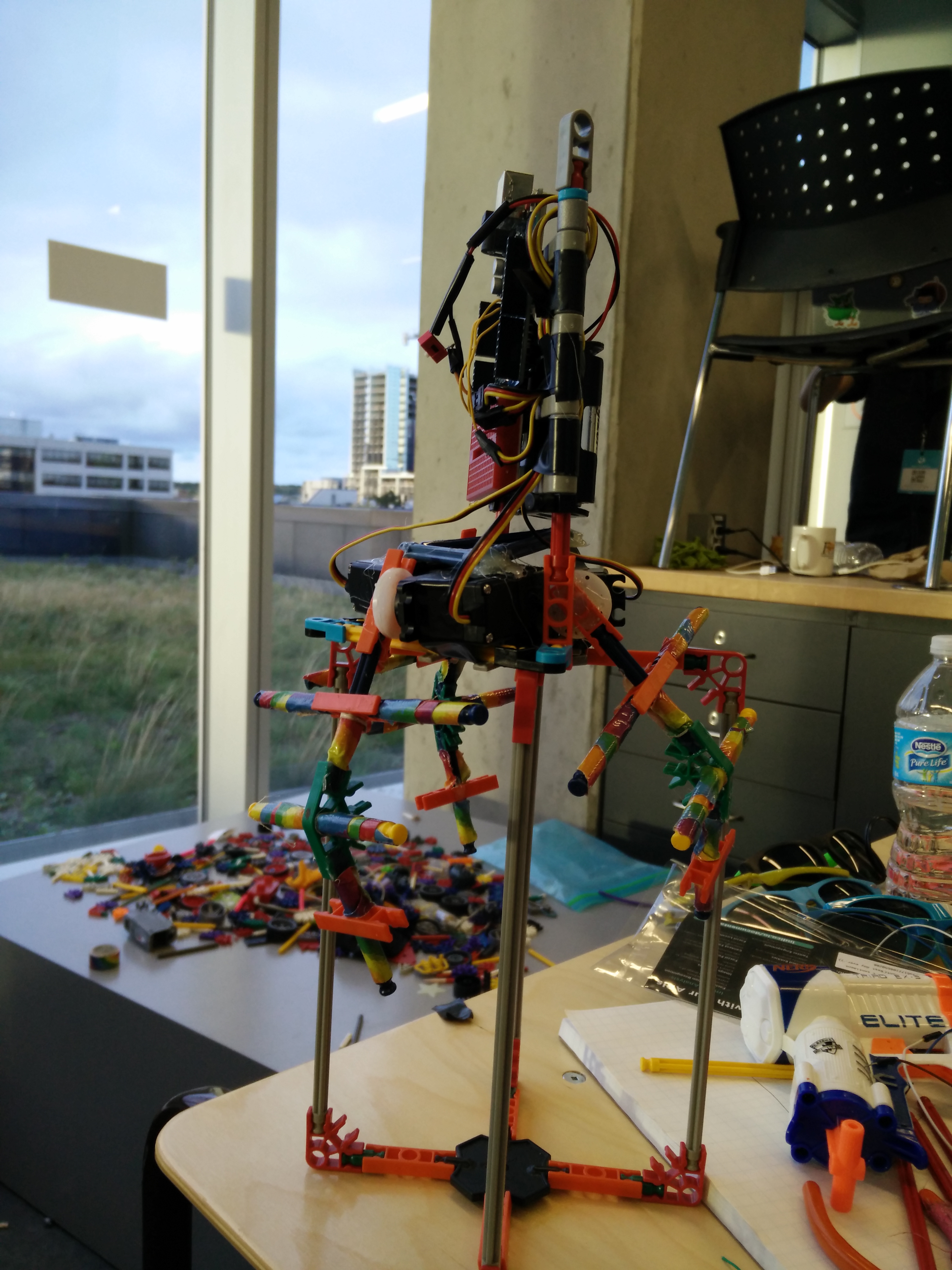
I built muse grip using a muse for detection of jaw clenches, a python backend for analysis of muse data and communication between muse and arduino, and an arduino with 3 servos as the prosthetic hand.
Challenges I ran into
Software
Immediately, there were issues with communicating with the muse to get any data at all. There is no supported python library for muse, so I had to write my own workaround. Further, cleansing the data to get rid of false positives was quite difficult - often muse throws a 0 in the middle of a bunch of 1s and tries to mess everything up. Finally, communicating between python and arduino is generally undocumented, so I had to realize that serial communication requires bytes of an iterable (took some time to realize this).
Hardware
I had never used servos prior to this, so using a servo was a completely new experience to me. Building a claw that could actually pick things up is quite difficult, I had issues with knex not being stable enough.
Accomplishments that I'm proud of
I'm proud of my reverse engineering of the muse - I looked at the data that the muse outputs to supported libraries and created my own in an unsupported environment, just throwing data at the muse until I was able to figure out some kind of understanding. I'm also proud of the pattern recognition algorithm, I think it's pretty awesome with user input.
What I learned
I learned that hardware hacks have a lot more issues than software hacks. Sometimes it feels like entire projects are falling apart, and that's incredibly unsettling. I learned to persevere and I got a product I'm happy with at the end!
What's next for Muse Grip
Next for muse grip is taking the code and porting it to a 3D printed prosthetic hand, such that we could have more realistic gripping for human interaction.



Log in or sign up for Devpost to join the conversation.