-
-
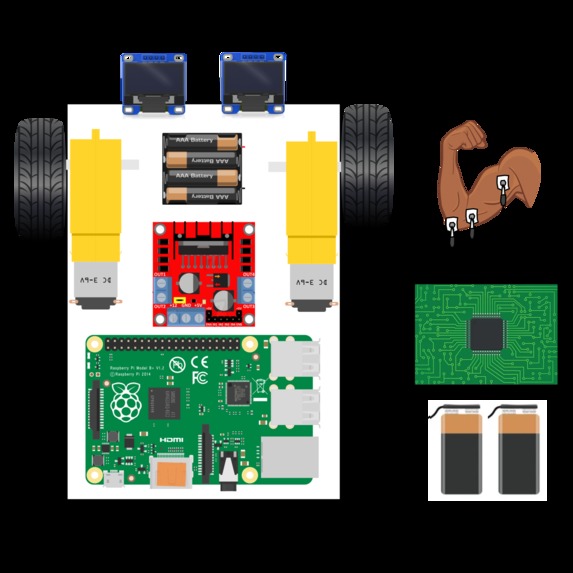
Hardware Block Diagram
-

Assembled Vehicle for TAMUhack
-

Prototyping and Testing of EMG filters



Inspiration
Our inspiration for our project came from a culmination of work our team has done in the past few years in classes, project teams and clubs, and research we've completed.
What it does
We've decided to make a culmination of our knowledge of both MXET and ESET to create a small, mobile robot that is controlled by EMG sensors connected to the users arms.
How we built it
We've designed our project from scratch, designing the 3D model using solidworks, creating a custom filter for the EMG sensor, and installing ros on a brand new raspberry pi as our goal was to upload live data from our sensors to the the Velo by Wix website we had learned to use for the first time.
Challenges we ran into
We ran into many issues that revolved mostly around the length of time it takes to prototype and filter the EMG signal we are reading as well as our inexperience with APIs and creating websites.
Accomplishments that we're proud of
Overall we've definitely enjoyed the experience, and we hope to take our project further in the coming months in order to fully flesh out our prototype and design a fully functioning version
What we learned
One of the greatest lessons we've learned is that if we focus our priorities on the minimum goals we have, and then we will always exceed those goals.
What's next for Muscle Motors
Future iterations of the Muscle Motor will be adding additional sensors, implementing ROS further, and creating a custom API for our robot.

Log in or sign up for Devpost to join the conversation.