-
-

multi vehicles
-
AI based detection
Inspiration
This project started with a simple question: Why do we still rely on fully manual systems for convoy movement, especially in defense and logistics, when accidents and inefficiencies are so common? I was inspired by how platooning systems are used in countries like Germany, but realized these technologies are often too expensive and unsuitable for Indian road infrastructure. Rather than just importing this tech, I drew inspiration from Vande Bharat—a proudly Made in India initiative—and aimed to build something indigenous, modular, and robust enough for Indian conditions. This was about more than solving a problem—it was about building the solution here, for us.
What it does
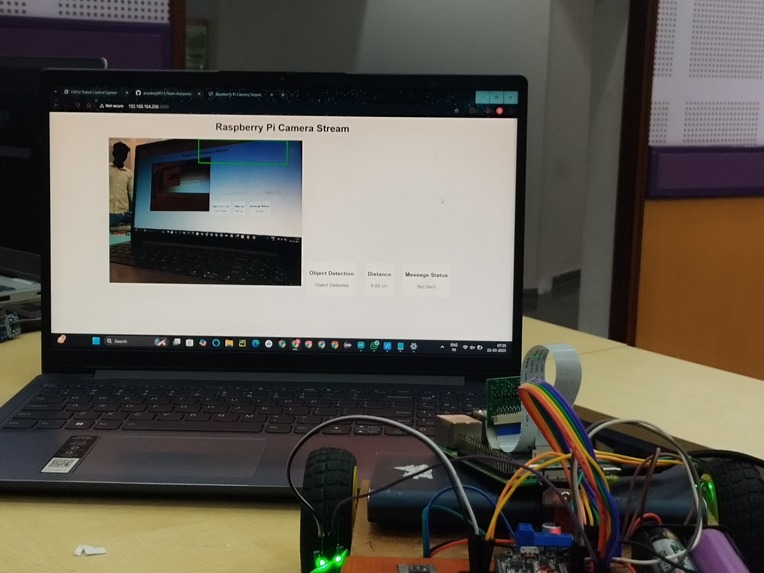
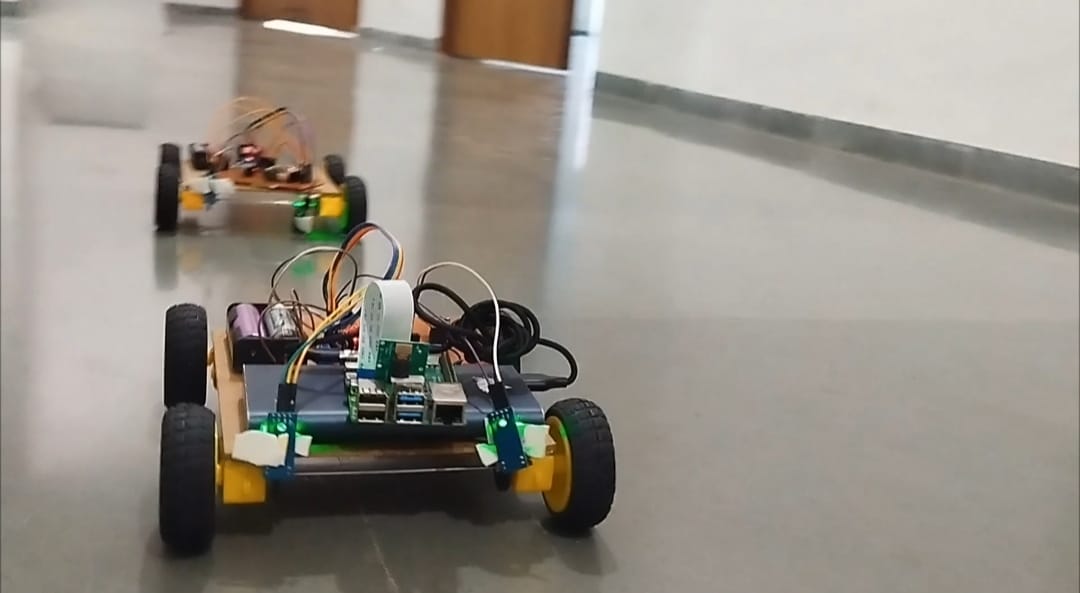
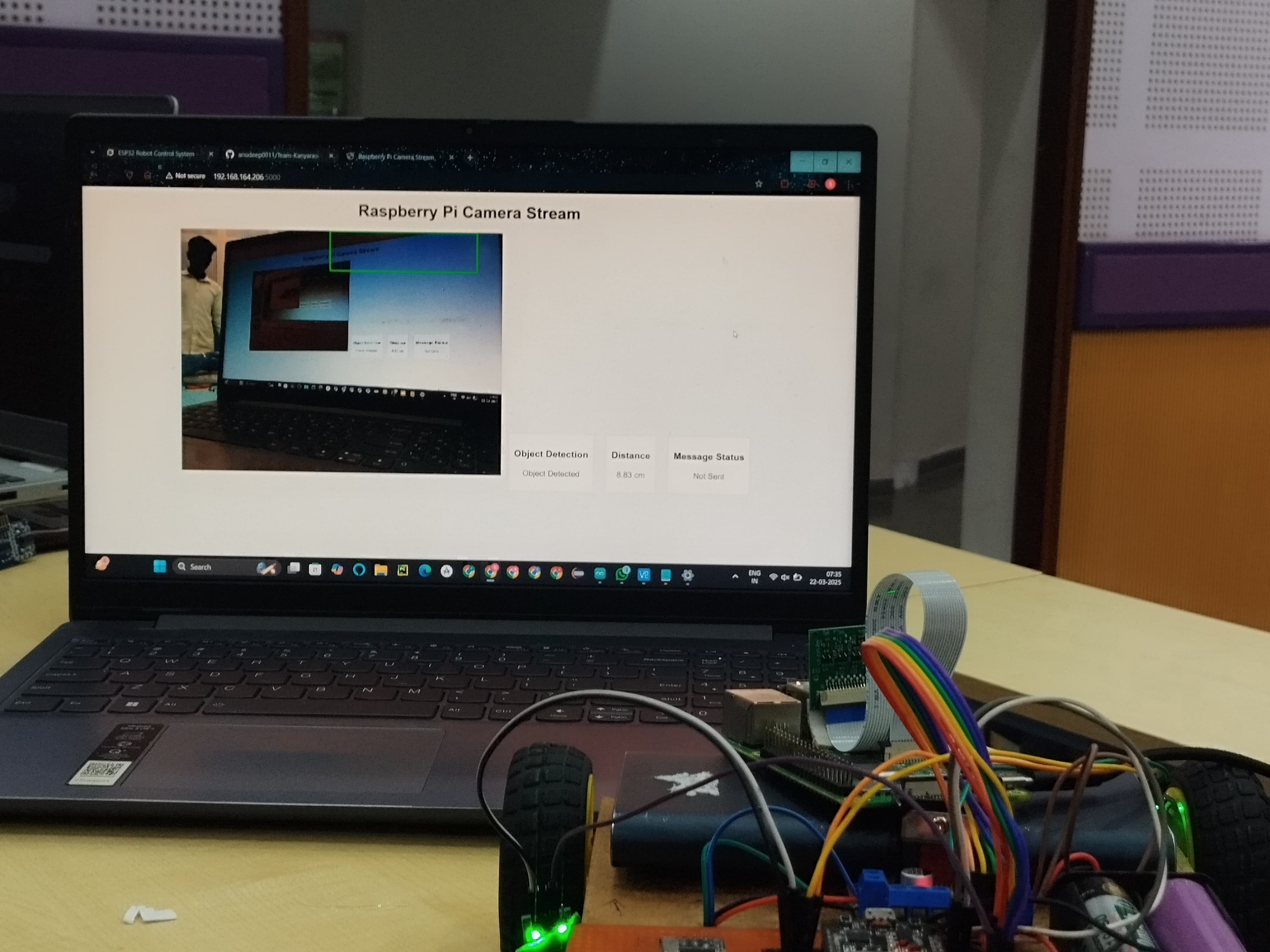
Our project enables Semi-Autonomous multi-vehicle platooning using affordable and modular IoT components. A lead vehicle equipped with a Raspberry Pi and camera communicates wirelessly with following vehicles, which replicate its movement using ultrasonic sensors and wheel encoders. This ensures real-time convoy synchronization, obstacle detection, and safe braking, all without expensive technologies like LIDAR or radar. It’s designed to be low-cost, scalable, and adaptable for Indian road conditions.
How we built it
We used: Raspberry Pi 4 as the processing unit. Ultrasonic sensors for obstacle detection and safe distance maintenance. Wheel encoders to track and mimic movements accurately. Wireless modules (RF/ESP-NOW) for inter-vehicle communication. A web-based UI for prototype-level control and monitoring. Each follower vehicle receives commands from the leader and adjusts speed/direction accordingly. The design allows for dynamic role switching and is structured as a retrofittable module suitable for existing trucks.
Challenges we ran into
Synchronizing wheel encoder data to maintain smooth turning and following. Sensor calibration and maintaining accurate distance measurements at varying speeds. Achieving real-time communication with minimal latency across all vehicles. Ensuring stable wireless connectivity in field conditions. NRF module limitations: as more vehicles are added, network congestion increases, causing low data transparency and unreliable transmission in multi-node scenarios. Integrating a modular design that can be retrofitted on a variety of truck types and configurations.
Accomplishments that we're proud of
Successfully created a working prototype of a multi-vehicle platooning system using basic sensors and microcontrollers. Demonstrated real-time convoy movement and effective obstacle detection during testing. Enabled safe and consistent vehicle following using IoT-based components, proving practical feasibility. Implemented dynamic role switching, allowing any vehicle to act as lead or follower as needed. Integrated an AI-based camera module for smarter obstacle detection and path awareness in the lead vehicle.
What we learned
How to synchronize multiple vehicles using simple hardware. The importance of sensor fusion and latency handling in moving systems. Designing for the Indian ecosystem requires balancing cost, ruggedness, and reliability. Prototyping communication systems and control logic for vehicle coordination is complex but achievable with iterative testing.
What's next for Multi Vehicle Platooning System Using IoT
Integrate 360° cameras, LIDAR, and long-range sensors for better obstacle awareness. Add 5G and edge computing for ultra-low-latency communication and cloud-based fleet management. Implement SLAM and ROS for real-time mapping and autonomous navigation. Develop a dashboard and analytics layer for logistics companies to track, simulate, and deploy platoons.
Collaborate with logistics and defense sectors to deploy at scale across India, aligning with the Make in India initiative.

Log in or sign up for Devpost to join the conversation.