-
-
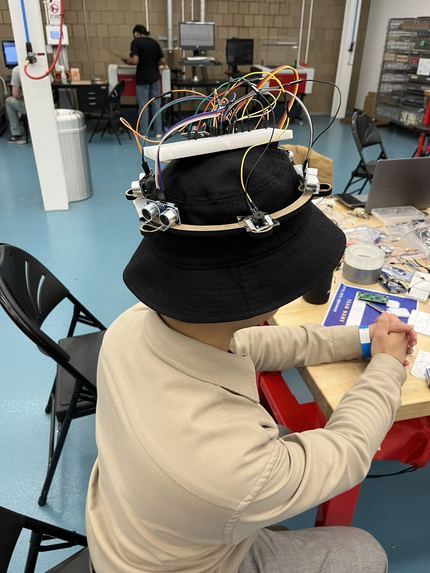
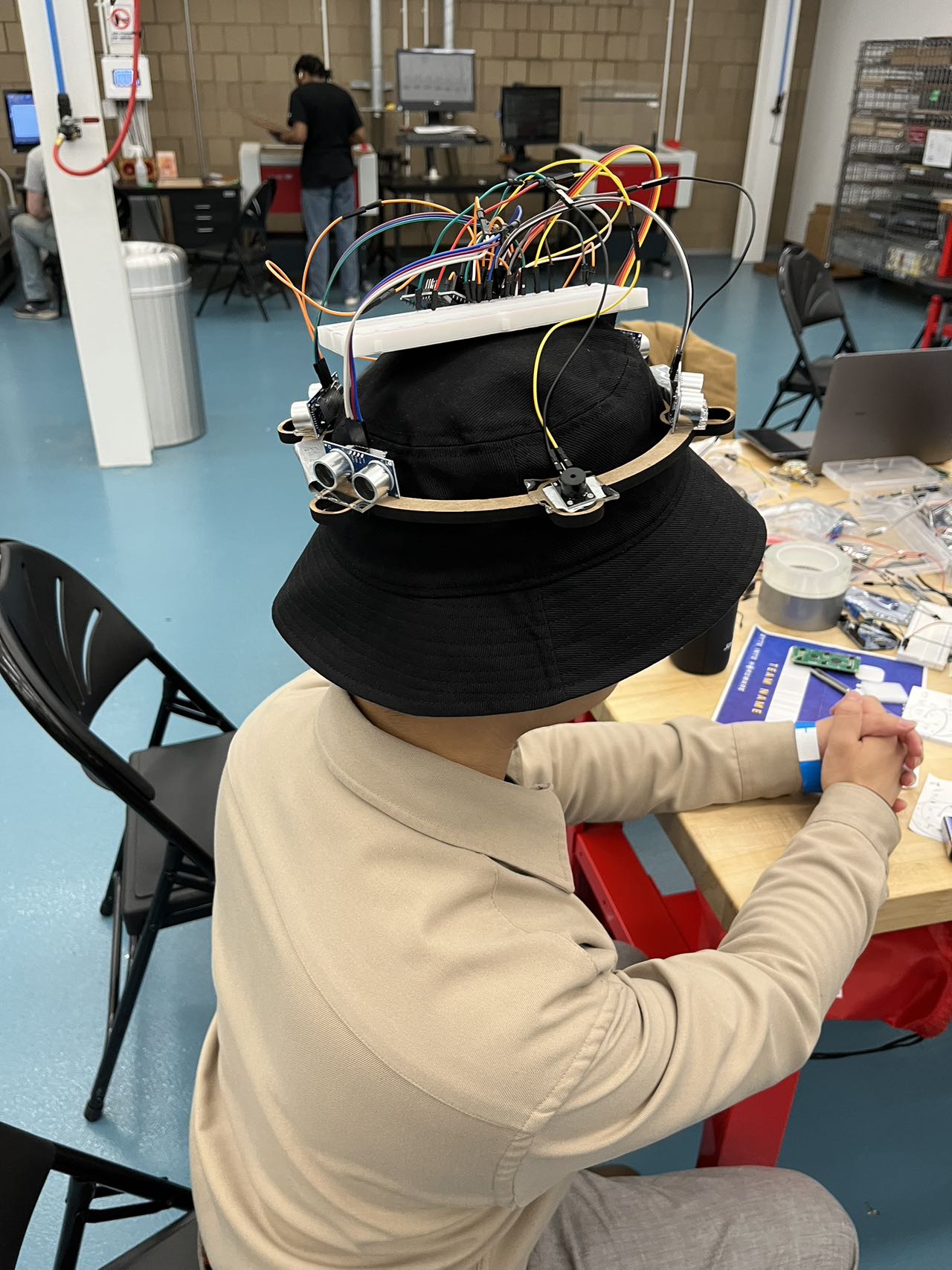
guide cap
-
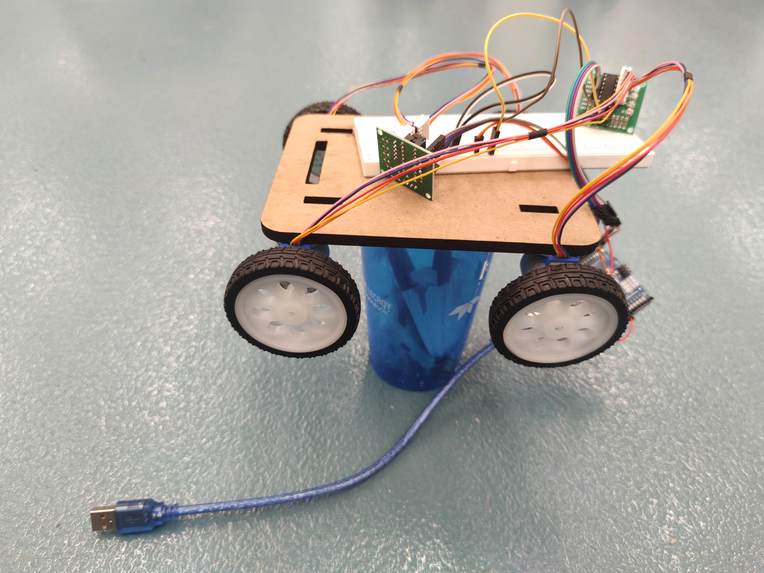
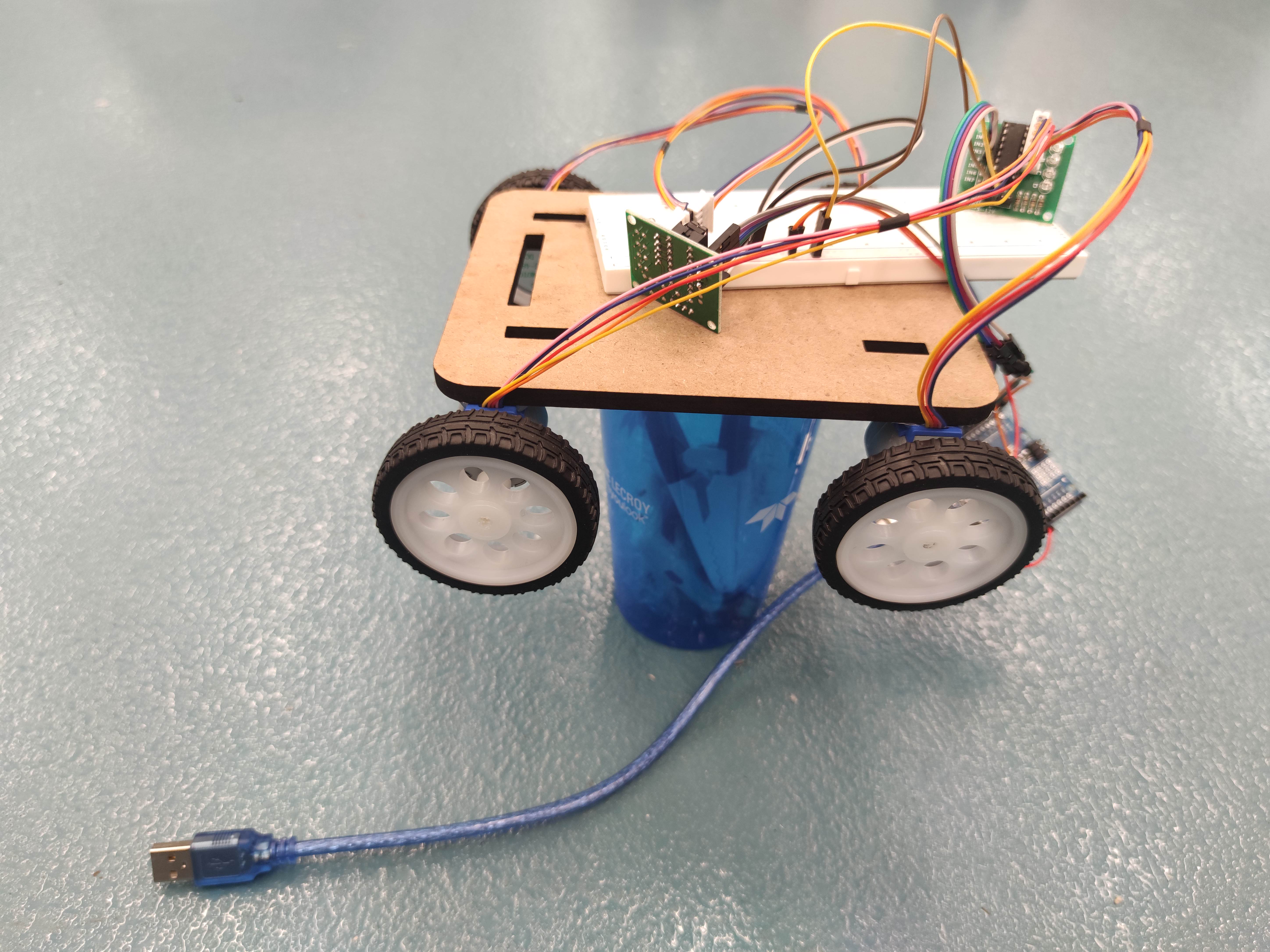
movable robot arm
-


Inspiration
Cap: Drivers cannot find the grass behind them, submarines in the deep sea cannot evade obstacles through visible light, and bats in the dark can hardly visually detect their prey... Ultrasonic ranging can perfectly solve this problem. Promptly reminding blind people before they collide with obstacles will effectively reduce their risk of traveling outside. Arm: The four-wheel drive lunar rover, the deep-sea unmanned probe... these robotic arms with their power system can skillfully help humans achieve some difficult tasks. Inspired by this, we decided to build a 4WD car with a robotic arm to also help disabled people with mobility difficulties.
What it does
Cap:
- Protect the privacy of blind people. A cap with a miniature detector is not as eye-catching as a guide stick.
- Easy to use. Compared to using a guide stick, a blind person using a navigation cap does not need to hold anything in their hands.
- Low cost. The production cost of the navigation cap is relatively low.
- Keep the guardian informed of the user’s health status. Arm:
- Four-wheel drive is more stable and has a smaller overall volume, making it suitable for complex terrain environments.
- The materials used are environmentally friendly.
- Low cost. ## How we built it Cap: First, we cut out the shape using a laser machine. Then we tried to connect the ultrasonic detector and the sensor. Finally, we uploaded the data obtained by the sensor to the microcontroller to match the buzzer to make different sounds. Arm: First, we used the laser cutter and combined the shape of the car. Then we used the microcontroller to control 4 motors to control the drive of the 4 wheels of the car. Finally, we tried to link the microcontroller with the remote control to move the whole car under control. ## Challenges we ran into Cap:
- The four ultrasonic sensors cannot interfere with each other.
- Provide accurate obstacle information to users.
- Circuit assembly design. We needed to simplify the design of wiring and electrical components.
- Carefully assemble the design without making any errors during assembly. Arm:
- The four drive engines must be kept in step.
- Car needed the ability to cross obstacles.
- Circuit assembly design. Simplify the design of wiring and electrical components.
- Carefully assemble the design without making any errors during assembly. ## Accomplishments that we're proud of
- Successfully built a connection between the computer controller and all sensors
- Created a device that helps disabled people in their everyday lives
- Highly efficiently built something out of nothing within 24 hours
- Troubleshot all problems with minimal equipment ## What we learned
- Cooperation: Knowing how to deal with disagreements to achieve an optimal design.
- Teamwork: Due to tight time restraints can distribute work evenly.
- High efficiency: Finished project in 24 hours. ## What's next for Untitled Cap:
- Enhance the sensitivity of the ultrasonic sensor so that it can identify even smaller obstacles.
- Improve the sensitivity of the vibrator and enhance the user’s sense of use.
- GPS positioning system and automatic alarm system can be added to the cap.
- Freely DIY for the picture of the cap.
- Simplify the wiring system to make it easy to assemble and improve reliability. Arm:
- The mechanical arm is to be installed (time limited).
- The truck can be designed as an automatic navigation system, that is, it automatically travels to the destination ground.
- The robot arm should be designed as an AI learning system, which automatically identifies the target to be picked up.
- Simplify the wiring system to make it easy to assemble and improve reliability.


Log in or sign up for Devpost to join the conversation.